一种新型的弹性驱动单元
一种新型的弹性驱动单元
【技术领域】
1.本发明属于康复外骨骼产品技术领域,特别涉及一种新型的弹性驱动单元。
背景技术:
2.近年来,随着高端装备制造业飞速发展,我国医疗器械行业发展迅速,市场规模不断增加,从宏观层面来说,其突出表现就是技术提升“减速换挡”,向质量与精细度转变,我国医疗器械行业中的下肢康复外骨骼机器人技术得到了飞速发展和广泛应用,为了保证人体与外骨骼的灵活性和安全性,外骨骼的执行机构需要具备一定的柔性,目前,下肢康复外骨骼机器人关节处的驱动机构大多数为刚性机构,在关节变向的瞬间,会产生较大的冲击力,容易对人体造成损害,此外,在外骨骼使用过程中,还可能会出现人机关节错位问题。
技术实现要素:
3.为了解决现有技术中下肢康复外骨骼机器人关节处的驱动机构大多数为刚性机构,在关节变向的瞬间,会产生较大的冲击力,容易对人体造成损害,此外,在外骨骼使用过程中,还可能会出现人机关节错位的问题,本发明提供了一种新型的弹性驱动单元。
4.本发明是通过以下技术方案实现的:
5.一种新型的弹性驱动单元,包括驱动器本体,设于所述驱动器本体上的驱动电机,与所述驱动电机输出端连接的第一弹性机构,与所述第一弹性机构连接的第二弹性机构,以及与所述第二弹性机构连接的从动件,所述第一弹性机构用于在所述驱动电机与所述第二弹性机构产生速度差时,使两者逐渐同步转动,所述第二弹性机构供所述从动件相对所述第一弹性机构偏移,并在偏移后为所述从动件提供恢复至初始位置的作用力。
6.如上所述的一种新型的弹性驱动单元,所述第一弹性机构包括与所述驱动电机输出端连接的输出盘,与所述输出盘连接的第一弹性组件,以及用于连接所述输出盘和所述第一弹性组件的第一连接模块。
7.如上所述的一种新型的弹性驱动单元,所述第二弹性机构包括与所述第一弹性机构连接的联轴器,与所述联轴器连接的的第二弹性组件,用于连接所述联轴器和所述第一弹性机构的第二连接模块,以及用于连接所述联轴器和所述第二弹性组件的第三连接模块。
8.如上所述的一种新型的弹性驱动单元,还包括用于连接所述第二弹性机构和所述从动件的第四连接模块。
9.如上所述的一种新型的弹性驱动单元,所述第一连接模块包括设于所述输出盘底部的连接块,以及设于所述第一弹性组件上并供所述连接块插入的连接槽,所述输出盘在旋转方向上的冲击力,传递到所述第一弹性组件,并被所述第一弹性组件所吸收。
10.如上所述的一种新型的弹性驱动单元,所述第二连接模块包括设于所述联轴器上的凸块,以及设于所述第一弹性组件上并供所述凸块插入的凹槽,所述联轴器与所述第一弹性组件连接,所述第一弹性组件将旋转方向上的冲击力吸收之后,缓慢释放给所述联轴
器。
11.如上所述的一种新型的弹性驱动单元,所述第三连接模块包括设于所述联轴器的第一定位孔,以及设于所述第二弹性组件上的第二定位孔,所述第一定位孔与所述第二定位孔对应连接,以使所述联轴器带动所述第二弹性组件进行旋转。
12.如上所述的一种新型的弹性驱动单元,所述第二弹性组件包括外圈和内圈,以及连接所述外圈和内圈的多个弹力片,所述从动件相对所述第一弹性机构发生错位时,所述内圈相对所述外圈平移,以偏离所述外圈轴线位置,所述弹力片通过弹性变形为所述内圈提供平移距离补偿后,并为所述内圈提供恢复至与所述外圈同轴状态的作用力。
13.如上所述的一种新型的弹性驱动单元,所述第四连接模块包括设于所述内圈上的第一连接孔,以及设于所述从动件上的第二连接孔,所述第一连接孔与所述第二连接孔对应连接,以使所述内圈相对于所述外圈位置发生平移方向位移的同时,所述内圈仍可以带动所述从动件转动。
14.本发明还提供了康复外骨骼,包括如上所述的一种新型的弹性驱动单元,所述从动件与外骨骼大腿机构进行连接,所述驱动器本体与外骨骼腰部机构进行连接。
15.与现有技术相比,本发明有如下优点:
16.1.本发明的一种新型的弹性驱动单元,可以安装两个弹性机构,第一弹性机构将驱动电机运转瞬间与第二弹性机构产生速度差时,使两者逐渐同步转动,实现柔性旋转的效果,减少对人体造成的损害,第二弹性机构供所述从动件相对所述第一弹性机构发生偏移,并在偏移后使所述从动件恢复至初始位置。
17.2.本发明的康复外骨骼,驱动器本体和从动件受力时,第二弹性机构通过允许驱动器本体和从动件之间发生相应的位移,来补偿使用过程中可能出现的人机关节错位问题,并在人机关节错位消失时,使从动件恢复至初始位置。
【附图说明】
18.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
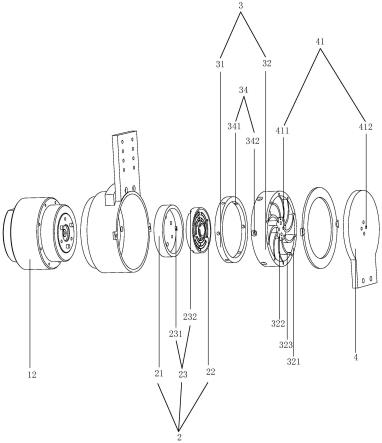
19.图1是本技术的拆解示意图;
20.图2是图1的组装图;
21.图3是本技术的第一弹性组件和联轴器示意图。
【具体实施方式】
22.为了使本发明所解决的技术问题技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
23.请参阅图1至图3,一种新型的弹性驱动单元,包括驱动器本体1,设于所述驱动器本体1上的驱动电机12,与所述驱动电机12输出端连接的第一弹性机构2,与所述第一弹性机构2连接的第二弹性机构3,以及与所述第二弹性机构3连接的从动件4,所述第一弹性机
构2用于在所述驱动电机12与所述第二弹性机构3产生速度差时,使两者逐渐同步转动,所述第二弹性机构3供所述从动件4相对所述第一弹性机构2偏移,并在偏移后为所述从动件4提供恢复至初始位置的作用力。
24.本发明的一种新型的弹性驱动单元,可以安装两个弹性机构,第一弹性机构将驱动电机运转瞬间与第二弹性机构产生速度差时,使两者逐渐同步转动,实现柔性旋转的效果,减少对人体造成的损害,第二弹性机构供所述从动件相对所述第一弹性机构发生偏移,并在偏移后使所述从动件恢复至初始位置。
25.进一步地,作为本方案的优选实施方式而非限定,所述第一弹性机构2包括与所述驱动电机12输出端连接的输出盘21,与所述输出盘21连接的第一弹性组件22,以及用于连接所述输出盘21和所述第一弹性组件22的第一连接模块23,在将驱动电机旋转方向的力传递至第一弹性组件的同时,还可以有效地保护第一弹性组件的结构不被破坏。
26.进一步地,作为本方案的优选实施方式而非限定,所述第二弹性机构3包括与所述第一弹性机构2连接的联轴器31,与所述联轴器31连接的的第二弹性组件32,用于连接所述联轴器31和所述第一弹性机构2的第二连接模块33,以及用于连接所述联轴器31和所述第二弹性组件32的第三连接模块34,连接两个弹性机构,使得两个弹性机构各自发挥作用时,互不干扰。
27.进一步地,作为本方案的优选实施方式而非限定,还包括用于连接所述第二弹性机构3和所述从动件4的第四连接模块41,使得人机关节发生错位时,可通过第二弹性机构进行缓冲、补偿。
28.进一步地,作为本方案的优选实施方式而非限定,所述第一连接模块23包括设于所述输出盘21底部的连接块231,以及设于所述第一弹性组件22上并供所述连接块231插入的连接槽232,所述输出盘21在旋转方向上的冲击力,传递到所述第一弹性组件22,并被所述第一弹性组件22所吸收,有利于第一弹性组件更充分的吸收输出盘传递过来的冲击力,使效果最大化。
29.进一步地,作为本方案的优选实施方式而非限定,所述第二连接模块33包括设于所述联轴器31上的凸块331,以及设于所述第一弹性组件22上并供所述凸块331插入的凹槽332,所述联轴器31与所述第一弹性组件22连接,所述第一弹性组件22将旋转方向上的冲击力吸收之后,缓慢释放给所述联轴器31,使得联轴器更轻松的与第一弹性组件进行配合安装,并接收经过第一弹性组件缓冲后的驱动力。
30.进一步地,作为本方案的优选实施方式而非限定,所述第三连接模块34包括设于所述联轴器31的第一定位孔341,以及设于所述第二弹性组件32上的第二定位孔342,所述第一定位孔341与所述第二定位孔342对应连接,以使所述联轴器31带动所述第二弹性组件32进行旋转。
31.进一步地,作为本方案的优选实施方式而非限定,所述第二弹性组件32包括外圈321和内圈322,以及连接所述外圈321和内圈322的多个弹力片323,所述从动件4相对所述第一弹性机构2发生错位时,所述内圈322相对所述外圈321平移,以偏离所述外圈321轴线位置,所述弹力片323通过弹性变形为所述内圈322提供平移距离补偿后,并为所述内圈322提供恢复至与所述外圈321同轴状态的作用力。
32.进一步地,作为本方案的优选实施方式而非限定,所述第一弹性机构和所述第二
弹性机构不仅限于上述实施例中说明的一种结构形式,凡是功能与之类似,都应包含在保护范围以内。
33.进一步地,作为本方案的优选实施方式而非限定,所述第四连接模块41包括设于所述内圈322上的第一连接孔411,以及设于所述从动件4上的第二连接孔412,所述第一连接孔411与所述第二连接孔412对应连接,以使所述内圈322相对于所述外圈321位置发生平移方向位移的同时,所述内圈322仍可以带动所述从动件4转动。
34.康复外骨骼,包括如上所述的一种新型的弹性驱动单元,所述从动件4与外骨骼大腿机构进行连接,所述驱动器本体1与外骨骼腰部机构进行连接。
35.本实施例的工作原理如下:
36.本发明的一种新型的弹性驱动单元,可以安装两个弹性机构,第一弹性机构将驱动电机运转瞬间与第二弹性机构产生速度差时,使两者逐渐同步转动,实现柔性旋转的效果,减少对人体造成的损害,第二弹性机构供所述从动件相对所述第一弹性机构发生偏移,并在偏移后使所述从动件恢复至初始位置。
37.如上是结合具体内容提供的实施方式,并不认定本技术的具体实施只局限于这些说明。凡与本技术的方法结构等近似雷同,或是对于本技术构思前提下做出若干技术推演或替换,都应当视为本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1