一种用于神经内镜固定的多维可调节装置的制作方法
1.本发明涉及微创医疗辅助器械技术领域,尤其涉及一种用于神经内镜固定的多维可调节装置。
背景技术:
2.神经内镜手术要求极为精细的手术操作,因此神经内镜手术过程中需对内镜进行固定以便提供稳定的术区图像,引导器械进行精细操作。
3.神经内镜手术要求器械操作具有极高的安全性,因此用于固定神经内镜的装置包括支撑臂和内镜安装装置。
4.神经内镜手术要求在手术过程中对内镜位置和术区图像区域做细微的调整,因此可通过对支撑臂整体姿态或末端的位置做调整来实现,然而,这样的调整需对支撑臂进行松开锁止机构、调整支撑臂和锁紧锁止机构的操作,操作过于繁琐,此外,由于支撑臂臂展较大,轻微的调整姿态会带来内镜末端位置的大幅变动,况且神经内镜手术多在有限的空间和病变区域内进行,这种内镜位置的大幅变动会使得内镜偏出术区范围,因此不得不经过多次调整来确保内镜位置正确,显然,这种调整是极其不便的,影响手术效率。
技术实现要素:
5.为解决的上述技术问题,本发明按以下技术方案予以实现:
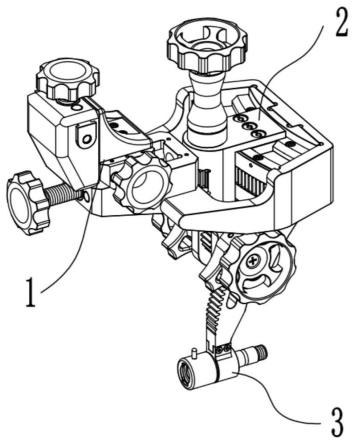
6.一种用于神经内镜固定的多维可调节装置,含平移调节机构1,所述平移调节机构1前侧设置有摆角调节机构2,所述摆角调节机构2远离平移调节机构1的下端设置有用于固定神经内镜的适配器3;
7.其特征在于,
8.所述平移调节机构1含自上而下依次设置的第一平移机构11、第二平移机构12、第三平移机构13、连接块14,其中第一平移机构11平移轴设置在竖直平面内,第二平移机构12平移轴设置在与第一平移机构11平移轴垂直的水平面内,第三平移机构13平移轴设置在第二平移机构12平移轴所在水平平面下方平面内并与第一平移机构11平移轴和第二平移机构12平移轴垂直,所述连接块14呈l型,其左侧与第一平移机构11连接,底部与第二平移机构12连接;
9.所述第一平移机构11含第一壳体111和设置在其内部的第一平移组件112,30所述第一平移组件112含滑块一1121、导轨组一1122、平移螺柱一1123、平移
10.螺母一1124、平移螺母二1125,其中滑块一1121滑动套装在导轨组一1122上,导轨组一1122由两个等径的圆柱导轨构成且其轴线与平移螺柱一1123轴线平行共面,平移螺柱一1123轴线设置在导轨组一1122对称中心平面内,平移螺母一1124为右旋螺母通过螺纹套装在平移螺柱一1123上大径端右旋螺柱一1126上35并固定在第一壳体111侧面台阶孔内,平移螺母二1125为左旋螺母通过螺纹套
11.装在平移螺柱一1123上小径端左旋螺柱一1127上并固定在滑块一1121侧面台
12.阶孔内;
13.所述第二平移机构12含第二壳体121和设置在其内部的第一平移组件112;
14.所述第一平移机构11、第二平移机构12通过转动平移螺柱一1123使其沿40轴向移动,同时驱动平移螺母二1125沿平移螺柱一1123轴向同向移动,进而平
15.移螺柱一1123和平移螺母二1125共同推动滑块一1121沿着导轨组一1122轴向移动,第一壳体111设置有让滑块一1121移动的活动区间一1111,第二壳体121设置有让滑块一1121移动的活动区间二1211;
16.所述第三平移机构13含第三壳体131和设置在其窄端内部的第二平移组件45 132,第三壳体131宽端设置有空腔一133,所述第二平移组件132有与第一平
17.移组件112相似的结构组成,不同处之一在于第二平移组件132所含导轨组二1321长度长于导轨组一1122,不同处之二在于第二平移组件132所含平移螺柱二1322大径端右旋螺柱二1323长度长于右旋螺柱一1126,且小径端左旋螺柱
18.二1324长度长于左旋螺柱一1127,平移螺母一1124通过螺纹套装在平移螺柱50二1322上大径端右旋螺柱二1323上并固定在第三壳体111窄端侧面台阶孔内,
19.平移螺母二1125通过螺纹套装在平移螺柱二1322上小径端左旋螺柱二1324上
20.并固定在滑块一1121侧面台阶孔内;
21.所述第三平移机构13通过转动平移螺柱二1322使其沿轴向移动,同时驱动
22.平移螺母二1125沿平移螺柱二1322轴向同向移动,进而平移螺柱二1322和平55移螺母二1125共同推动滑块一1121沿着导轨组二1321轴向移动,第三壳体131窄端设置有让滑块一1121移动的活动区间三1311;
23.所述摆角调节机构2含自上而下依次设置的第一摆角调节机构21、第二摆角调节机构22、锁止拨轮组23,其中第一摆角调节机构21水平设置,第二摆角调节机构22竖直设置,锁止拨轮组23设置在第二摆角调节机构22上;
24.所述第一摆角调节机构21含第四壳体211、第一齿轮组件212、齿条一213、导轨组三214,所述第四壳体211宽端为弧形面2111,自上而下依次设置有凹槽一2112、凹槽二2113、凹槽三2114,所述第一齿轮组件212设置在弧形面2111一侧,其含凸轮一2121、轴套组件一2122、齿轮2123、轴套一2124、压缩弹簧2125、转动轴2126、螺纹销2127、轴套二2128,其中凸轮一2121、轴套组件一2122、齿轮2123、轴套一2124、压缩弹簧2125自上而下依次套装在转动轴2126上,螺纹销2127设置在轴套一2124内孔内通过螺纹连接在转动轴2126下端,轴套组件一2122大径端螺纹为左旋螺纹,轴套二2128通过螺纹套装在轴套组件一2122大径端,所述齿条一213为弧形齿条,设置在凹槽二2113内与齿轮2123齿高等高且相互咬合,转动凸轮一2121驱动齿轮组件212沿齿条一213滚动,所述导轨组三214含弧形导轨一2141、弧形导轨二2142、弧形导轨三2143、弧形导轨四2144,其中弧形导轨一2141与弧形导轨三2143规格一致并相对于齿条一213对称设置,弧形导轨二2142与弧形导轨四2144规格一致并相对于齿条一213对称设置,弧形导轨一2141、弧形导轨二2142共面安装在凹槽一2112内且弧心重合,弧形导轨三2143、弧形导轨四2144共面安装在凹槽三2114内且弧心重合;
25.所述第二摆角调节机构22含第五壳体221、滑块组222、第二齿轮组件223、齿条二224、导轨组四225,所述第五壳体221含空腔二2211、空腔三2212、空腔四2213、空腔五2214、安装孔组一2215、安装孔组二2216、安装孔组三2217、安装孔组四2218,其中空腔二2211设
置在顶部自左向右贯穿第五壳体221,空腔三2212设置在顶部自前向后贯穿第五壳体221并与空腔二2211贯通,空腔四2213设置在底部自左向右贯穿第五壳体221,空腔五2214设置在底部右侧自上而下贯穿第五壳体221并与空腔四2213贯通,安装孔组一2215设置在第五壳体221左侧顶部自上而下贯通空腔二2211,安装孔组二2216设置在第五壳体221底部左侧自前向后贯通空腔四2213,安装孔组三2217和安装孔组四2218设置在第五壳体221底部右侧自前向后贯通空腔五2214,所述滑块组222含两个弧形滑块2221对称设置在空腔三2212上下侧面上,弧形滑块2221截面为y型其窄端朝向空腔三2212内部,所述第二齿轮组件223含凸轮二2231、轴套组件一2122、齿轮2123、转动轴2126、轴套组件二2232、凸轮三2233、轴套二2128、轴套三2234,其中轴套组件二2232大径端螺纹为右旋螺纹,凸轮二2231、轴套组件一2122、齿轮2123、轴套组件二2232、凸轮三2233自前向后依次套装在转动轴2126上,轴套组件二2232大径端为右旋螺纹,轴套二2128通过螺纹套装在轴套组件一2122大径端并与凸轮二2231紧贴,轴套三2234通过螺纹套装在轴套组件二2232大径端并与凸轮三2233紧贴,凸轮二2231和凸轮三2233通过螺钉与转动轴2126连接,轴套组件一2122和轴套组件二2232小径端通过螺纹套装在安装孔组二2216内,齿轮2123设置在空腔四2213内,所述齿条二224设置在空腔五2214内并于齿轮2123相互咬合,其上设置有弧形槽2241,安装孔组三2217和安装孔组四2218贯穿弧形槽2241,所述导轨组四225含弧形导轨组2251、定位组件一2252、定位组件二2253,其中弧形导轨组2251截面为工字型由一对弧形导轨五2254对称拼接组成,弧形导轨五2254截面为t字型两端设置有定位孔一2255和定位孔二2256,定位组件一2252和定位组件二2253由螺纹销二2257和螺母2258通过螺纹对接组成,定位组件一2252小径端套装在定位孔一2255、位孔一2256内其大径端套装在安装孔组三2217、安装孔组四2218内,定位组件二2253小径端套装在定位孔一2255、位孔一2256内其大径端套装在安装孔组三2217、安装孔组四2218内,弧形导轨组2251设置在空腔五2214内且其窄端套装在弧形槽2241内,弧形槽2241弧长大于弧形导轨组2251窄端弧长,转动第二齿轮组件223驱动齿条二224在导轨组四225上沿弧形导轨组2251上下滑动;
26.所述锁止拨轮组23含锁止拨轮一231、锁止拨轮二232,锁止拨轮一231套装并通过螺钉固定在轴套二2128上,锁止拨轮二232套装并通过螺钉固定在轴套三2234上;
27.所述适配器3通过螺钉固定在齿条二224的细端,轴孔31用于套装内窥镜轴部,轴孔31轴线a在竖直平面内位于弧形导轨一2141弧心下方并穿过弧形齿条二224回转中心;
28.所述套装在适配器3上的内镜通过转动平移调节机构1所含第一平移机构11上平移螺柱一1123实现其轴部上下位置的调节,通过转动第二平移机构12上平移螺柱一1123实现其轴部左右位置的调节,通过转动第三平移机构13上平移螺柱二1322实现其轴部前端前后位置的调节,通过转动摆角调节机构2所含凸轮一2121实现其轴部绕前端一点左右摆角α的调节,所述摆角α的调节范围为
±
10
°
,通过转动摆角调节机构2所含凸轮二2231或凸轮三2233亦或同时转120动二者实现其轴部绕前端一点上下摆角β的调节,所述摆角β的调节范围为
±
10
°
;
[0029][0030]
进一步的,所述构成导轨组1122和导轨组1321的圆柱导轨等径;
[0031]
进一步的,所述活动区间一1111和活动区间二1211大小相同,活动区间三1311大于活动区间一1111和活动区间二1211;
[0032]
进一步的,所述平移螺柱一1123上右旋螺柱一1126螺纹口径和螺纹间距大于左旋螺柱一1127,平移螺柱二1322上右旋螺柱二1323螺纹口径和螺纹间距大于左旋螺柱二1324;
[0033]
进一步的,所述弧形导轨一2141和弧形导轨三2143内圆弧面的半径与弧形滑块2221窄端外圆弧面的半径一致,弧形导轨二2142和弧形导轨四2144外圆130弧面的半径与弧形滑块2221窄端内圆弧面的半径一致;
[0034]
进一步的,所述弧形导轨一2141和弧形导轨二2142之间的导向槽截面为y型,弧形导轨三2143和弧形导轨四2144之间的导向槽截面为倒立y型。
[0035]
一种实现所述用于神经内镜固定的多维可调节装置锁止和解锁的方法,含三种锁止和解锁方式;
[0036]
其特征在于,
[0037]
方式一为自前往后方位顺时针转动锁止拨轮一231进而驱动轴套二2128顺时针转动,轴套组件一2122大径端左旋螺纹推动轴套二2128向凸轮二2231移动,进而推动凸轮二2231、转动轴2126、凸轮三2233一并同向移动,直至轴套二2128和锁止拨轮一231端面与凸轮二2231端面挤紧同时轴套三2234和锁止140拨轮二232端面与凸轮三2233端面挤紧实现锁止,相反的自后往前逆时针转动锁止拨轮一231可实现解锁;
[0038]
方式二为自前往后方位顺时针转动锁止拨轮二232进而驱动轴套三2234顺时针转动,轴套组件二2232大径端右旋螺纹推动轴套三2234向凸轮三2233移动,进而推动凸轮二2231、转动轴2126、凸轮三2233一并同向移动,直至轴套145三2234和锁止拨轮二232端面与凸轮三2233端面挤紧同时轴套二2128和锁止拨轮一231端面与凸轮二2231端面挤紧实现锁止,相反的自后往前逆时针转动锁止拨轮二232可实现解锁;
[0039]
方式三为同时顺时针转动锁止拨轮一231和锁止拨轮二232,同方式一和方式二实现锁止,相反的单独逆时针转动锁止拨轮一231或锁止拨轮二232亦或同150时逆时针转动锁止拨轮一231和锁止拨轮二232均可实现解锁。
[0040]
本发明的积极进步效果在于:
[0041]
本发明的一种用于神经内镜固定的多维可调节装置是一种于神经内镜手术中用于固定神经内镜和实时调整神经内镜位置姿态的机构设计,在固定神经内镜的同时平移调节机构实现了对神经内镜插入部前端在上下、左右、前后六个方向155上位置的精细调整,同时俯仰角调节机构实现了神镜内镜插入部在水平、垂直两个平面内相对于其前端倾斜角度的调整,锁止拨轮组实现了随时对第二摆角调节机构的活动锁止和解锁,以便于医生更好更快的选择和调整手术中的术区图像区域,提高了手术操作的精细度,提升了手术的效率。
附图说明
[0042]
图1为本发明一种用于神经内镜固定的多维可调节装置示意图;
[0043]
图2为本发明一种用于神经内镜固定的多维可调节装置组成示意图;
[0044]
图3为本发明一种用于神经内镜固定的多维可调节装置上所含平移调节机构组成示意图;
[0045]
图4为本发明一种用于神经内镜固定的多维可调节装置上平移调节机构所165含
第一平移机构组成示意图;
[0046]
图5为本发明一种用于神经内镜固定的多维可调节装置上平移调节机构所含第一平移机构部件第一平移组件组成示意图;
[0047]
图6为本发明一种用于神经内镜固定的多维可调节装置上平移调节机构所含第一平移组件部件平移螺柱一示意图;
[0048]
图7为本发明一种用于神经内镜固定的多维可调节装置上平移调节机构所含第二平移机构组成示意图;
[0049]
图8为本发明一种用于神经内镜固定的多维可调节装置上平移调节机构所含第三平移机构组成示意图;
[0050]
图9为本发明一种用于神经内镜固定的多维可调节装置上平移调节机构所175含第三平移机构部件第二平移组件示意图;
[0051]
图10为本发明一种用于神经内镜固定的多维可调节装置上平移调节机构所含第二平移组件部件平移螺柱二示意图;
[0052]
图11为本发明一种用于神经内镜固定的多维可调节装置所含摆角调节机构组成示意图;
[0053]
图12为本发明一种用于神经内镜固定的多维可调节装置上摆角度调节机构所含第一摆角调节机构组成示意图;
[0054]
图13为本发明一种用于神经内镜固定的多维可调节装置上摆角调节机构所含第一摆角调节机构部件第四壳体示意图;
[0055]
图14为本发明一种用于神经内镜固定的多维可调节装置上摆角调节机构所185含第一摆角调节机构部件第一齿轮组件示意图;
[0056]
图15为本发明一种用于神经内镜固定的多维可调节装置上摆角调节机构所含第一摆角调节机构部件导轨组三截面示意图;
[0057]
图16为本发明一种用于神经内镜固定的多维可调节装置上摆角度调节机构所含第二摆角调节机构组成示意图;
[0058]
图17为本发明一种用于神经内镜固定的多维可调节装置上摆角调节机构所含第二摆角调节机构部件第五壳体示意图;
[0059]
图18为本发明一种用于神经内镜固定的多维可调节装置上摆角调节机构所含第二摆角调节机构部件滑块组组成部件弧形滑块示意图;
[0060]
图19为本发明一种用于神经内镜固定的多维可调节装置上摆角调节机构所195含第二摆角调节机构部件第二齿轮组件组成示意图;
[0061]
图20为本发明一种用于神经内镜固定的多维可调节装置上摆角调节机构所含第二摆角调节机构部件导轨组四组成示意图;
[0062]
图21为本发明一种用于神经内镜固定的多维可调节装置上摆角调节机构所含第二摆角调节机构部件导轨组四组成部件弧形导轨示意图;
[0063]
图22为本发明一种用于神经内镜固定的多维可调节装置上摆角调节机构所含第二摆角调节机构部件齿条二示意图;
[0064]
图23为本发明一种用于神经内镜固定的多维可调节装置上摆角度调节机构所含锁止拨轮组位置示意图;
[0065]
图24为本发明一种用于神经内镜固定的多维可调节装置所含适配器轴线位205置顶部示意图;
[0066]
图25为本发明一种用于神经内镜固定的多维可调节装置所含适配器轴线位置前部示意图;
[0067]
图26为本发明一种用于神经内镜固定的多维可调节装置上摆角调节机构摆角α调节范围示意图;
[0068]
图27为本发明一种用于神经内镜固定的多维可调节装置上摆角调节机构摆角β调节范围示意图;
具体实施方式
[0069]
为了更好的理解本发明的技术方案,现结合具体实施方式和工作原理来详细说明:
[0070]
实施例一
[0071]
本实施例具有与技术方案完全相同的结构,本实施例中通过自前往后方位顺时针转动锁止拨轮一231进而驱动轴套二2128顺时针转动,轴套组件一2122大径端左旋螺纹推动轴套二2128向凸轮二2231移动,进而推动凸轮二2231、转动轴2126、凸轮三2233一并同向移动,直至轴套二2128和锁止拨轮一231端220面与凸轮二2231端面挤紧同时轴套三2233和锁止拨轮二232端面与凸轮三2233端面挤紧实现锁止,相反的自后往前逆时针转动锁止拨轮一231可实现解锁。
[0072]
实施例二
[0073]
本实施例具有与技术方案完全相同的结构,本实施例中通过自前往后方位顺时针转动锁止拨轮二232进而驱动轴套三2234顺时针转动,轴套组件二2232大225径端右旋螺纹推动轴套三2234向凸轮三2233移动,进而推动凸轮二2231、转动轴2126、凸轮三2233一并同向移动,直至轴套三2234和锁止拨轮二232端面与凸轮三2233端面挤紧同时轴套二2128和锁止拨轮一231端面与凸轮二2231端面挤紧实现锁止,相反的自后往前逆时针转动锁止拨轮二232可实现解锁。
[0074]
实施例三
[0075]
本实施例具有与技术方案完全相同的结构,本实施例中通过同时顺时针转动锁止拨轮一231和锁止拨轮二232,同实施例一和实施例二实现锁止,相反的单独逆时针转动锁止拨轮一231或锁止拨轮二232亦或同时逆时针转动锁止拨轮一231和锁止拨轮二232均可实现解锁。
[0076]
下面以实施例一为例,结合附图对本发明的工作原理做详细说明:
[0077]
如图1、图2、图3、图4、图5、图6装置通过转动第一平移机构11上平移螺柱一1123使其沿固定在第一壳体111侧面台阶孔内的平移螺母一1124轴向上下移动,同时驱动平移螺母二1125沿平移螺柱一1123轴向同向移动,进而平移螺柱一1123和平移螺母二1125共同驱动滑块一1121沿着导轨组一1122轴向上下移动,同时连接块14及与之连接的第二平移机构12和设置在其下方的第三平移机构13以及设置在第三平移机构13上空腔一133内的摆角调节机构2和设置在下端的适配器3跟随滑块一1121上下移动,进而实现套装在适配器3上的内镜轴部上下位置的调节;
[0078]
如图7装置通过转动第二平移机构12上平移螺柱一1123使其沿固定在滑块一1121侧面台阶孔内的平移螺母二1125轴向左右移动,同时驱动平移螺母一1124沿平移螺柱一1123轴向同向移动,进而平移螺柱一1123和平移螺母一1124共同驱动第二壳体121沿着导轨组一1122轴向左右移动,同时设置在其下方的第三平移机构13以及设置在第三平移机构13上空腔一133内的摆角调节机构2和设置在下端的适配器3跟随第二壳体121左右移动,进而实现套装在适配器3上的内镜轴部左右位置的调节;
[0079]
如图8、图9、图10装置通过转动第三平移机构13上平移螺柱二1322使其沿固定在滑块一1121侧面台阶孔内的平移螺母二1125轴向前后移动,同时驱动平移螺母一1124沿平移螺柱二1322轴向同向移动,进而平移螺柱二1322和平移螺母一1124共同驱动第三壳体131沿着导轨组二1321轴向前后移动,同时设置在第三壳体131上空腔一133内的摆角调节机构2和设置在下端的适配器3跟随第三壳体131左前后移动,进而实现套装在适配器3上的内镜轴部前后位置的调节;
[0080]
如图11、图12、图13、图14、图15、图16、图17、图18装置通过转动凸轮一2121驱动齿轮组件212沿齿条一213滚动,带动第五壳体221和对称设置在第五壳体221上空腔三2212上下侧面上的滑块组222一并沿设置在第四壳体211上凹槽一2112和凹槽三2114内的导轨组三214上弧形导轨一2141与弧形导轨二2142之间的y型导向槽和弧形导轨三2143与弧形导轨四2144之间的倒立y型导向槽沿弧形左右滑动,同时设置在第五壳体221上的第二齿轮组件223、齿条二224、导轨组四225和下端的适配器3跟随沿弧形左右滑动;
[0081]
如图19、图20、图21、图22装置通过转动第二齿轮组件223上凸轮二2231和凸轮三2233驱动齿条二224沿套装在弧形槽2241内的弧形导轨组2251在空腔五2214内沿弧形上下滑动,同时设置在装置下端的适配器3跟随沿弧形上下滑动;
[0082]
如图23装置通过自前往后方位顺时针转动锁止拨轮组23上锁止拨轮一231驱动轴套二2128顺时针转动,轴套组件一2122大径端左旋螺纹推动轴套二2128向凸轮二2231移动,进而推动凸轮二2231、转动轴2126、凸轮三2233一并同向移动,直至轴套二2128和锁止拨轮一231端面与凸轮二2231端面挤紧同时轴套三2233和锁止拨轮二232端面与凸轮三2233端面挤紧实现第二齿轮组件223的锁止,进而锁止齿条二224沿套装在弧形槽2241内的弧形导轨组2251在空腔五2214内沿弧形上下滑动,同时锁止设置在装置下端的适配器3沿弧形上下滑动,防止套装在适配器3上的内镜下坠,通过逆时针转动锁止拨轮组23上锁止拨轮一231驱动其与轴套二2128一并脱离与凸轮二2231接触,同时锁止拨轮二232和轴套三2233也脱离与凸轮三2233接触实现第二齿轮组件223的解锁,进而齿条二224和设置在装置下端的适配器3能在第二齿轮组件223驱动下沿套装在弧形槽2241内的弧形导轨组2251沿弧形上下滑动;
[0083]
如图24、图25、如图26、如图27装置通过转动第一摆角调节机构21上第一齿轮组件212上凸轮一2121实现套装在适配器3上的内镜轴部在水平向绕弧形导轨一2141弧心左右摆动,摆角α的调节范围为
±
10
°
,装置通过转动第二摆角调节机构22上第二齿轮组件223上的凸轮二2231和凸轮三2233实现套装在适配器3上的内镜轴部在竖直向绕条二224回转中心上下摆动,摆角β的调节范围为
±
10
°
。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1