一种复合消杀服务机器人及其工作方法与流程
本发明涉及服务机器人,尤其涉及一种复合消杀服务机器人。本发明还涉及一种复合消杀服务机器人的工作方法。
背景技术:
1、近年来,需对一些区域或者人员流动相对较大的场合进行消毒灭菌,以此来阻断病毒传播。传统消毒方法是人工消杀,人工消杀具体是指人为将消毒液喷洒到需要消毒杀菌的区域或者空间。但人工消杀不仅浪费人工,效率低下,不及时,最重要的是,还增加了交叉感染病毒的可能。
2、随着人工智能机器人的发展,出现了用服务机器人替代人工消毒的自动消毒机器人,利用机器人协助医护人员完成人群聚集区域的消毒工作,减轻他们的工作量,不仅能避免医护人员被感染的风险,而且在一定程度内能缓解医护人员的心理负担。
3、虽然现在市面上也有一些消杀服务机器人,但是,目前的消杀机器人仍然存在一些问题:1、消杀机器人消杀不够彻底,消杀区域的一些污染垃圾(例如医疗废弃物、废弃口罩等)不能消杀干净,有再污染的风险;2、不能对消杀区域的环境进行监测,需要人工手动操作一些动作,智能化程度不高;3、不能对操作人员进行识别,任何人员都能操作,因不当操作导致机器损坏。为解决以上为题,本技术提出了一种复合消杀服务机器人。
技术实现思路
1、本发明旨在提供一种复合消杀服务机器人,以克服现有技术中存在的不足。
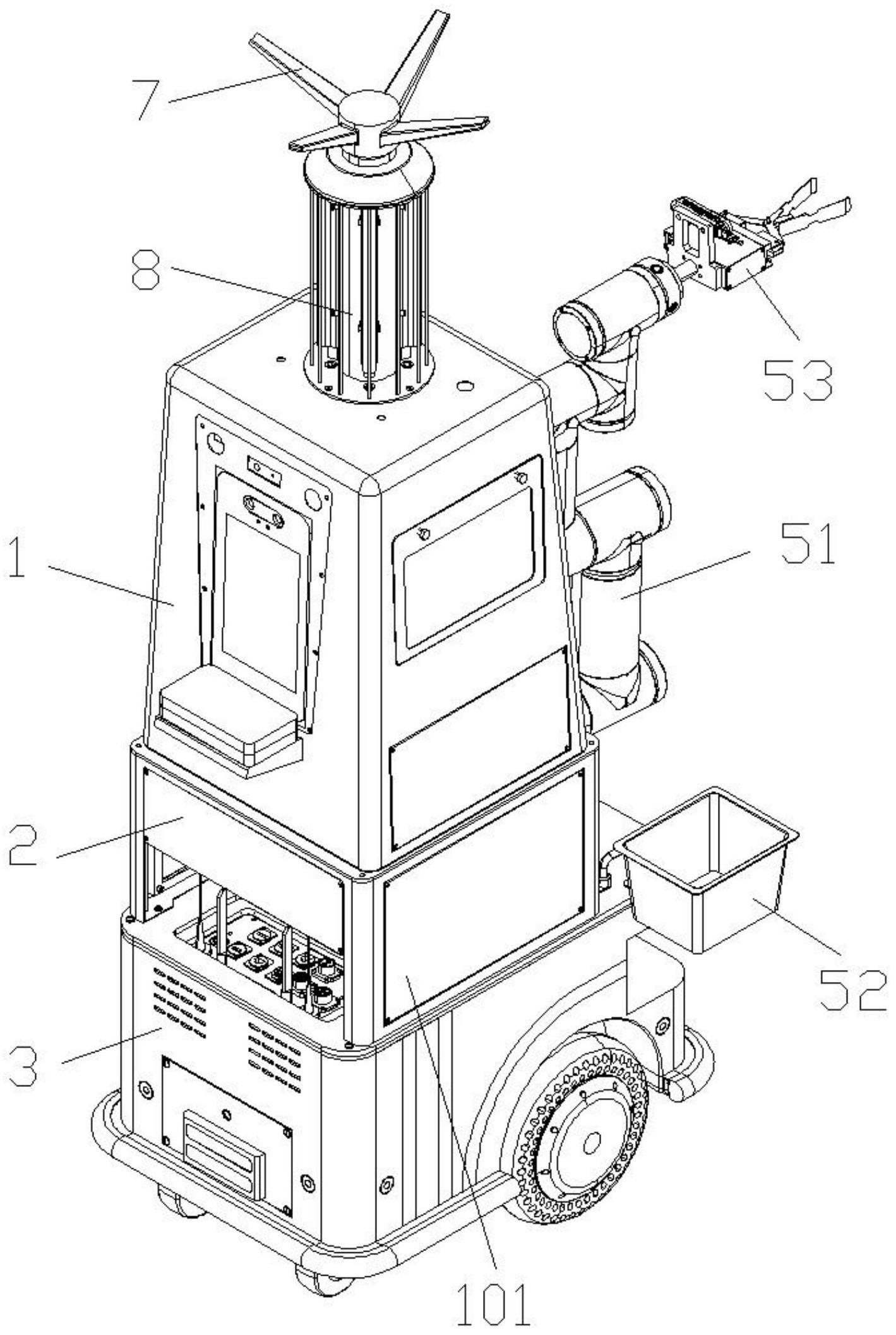
2、为解决上述技术问题,本发明的技术方案是:一种复合消杀服务机器人,包括机体、导航模块、消杀模块、环境监控模块、安防模块、语音模块、清理模块、控制模块,所述机体由三层平台组装而成,从上到下分别为上层平台、中层平台和移动平台,所述移动平台能驱动整个机体移动,所述移动平台上设有导航模块、环境监控模块、清理模块,所述中层平台上设有控制模块,所述上层平台上设有消杀模块、安防模块和语音模块;所述安防模块用于身份认证以及检测人员的体温、口罩佩戴情况,包括模式识别摄像头和测温装置;所述清理模块用于清理消杀区域的垃圾,包括协作机器人、垃圾桶以及设于协作机器人末端的执行机构,所述协作机器人安装在移动平台上方一侧,所述垃圾桶设于协作机器人一侧。
3、导航模块,用于采集消杀区域的环境地图并导航、避障,保证消杀服务机器人消杀过程中移动顺畅;消杀模块,用于对消杀区域消杀;环境监控模块用于对消杀区域的环境进行监控,包括烟雾传感器、温湿度传感器等;安防模块,用于身份认证以及检测人员的体温、口罩佩戴情况;语音模块,用于语音播报提示、指令等,实现语音交互与控制功能,安防模块与语音模块相配合,组成智能语音系统,指导操作人员操作消杀服务机器人;清理模块,用于清理消杀区域的污染垃圾;控制模块,用于收集数据、处理数据,并发出指令控制各模块工作。
4、进一步的,上述的复合消杀服务机器人,所述移动平台底部设有驱动轮以及驱动驱动轮行走的电机动力组件,所述驱动轮设于移动平台前侧,所述驱动轮后侧还设有万向轮。所述移动平台采用直流电机+轮式驱动的驱动方式,具有全向移动功能。
5、进一步的,上述的复合消杀服务机器人,所述移动平台内部还设有为设备供电的电池组,电池组续航能力达到10小时,支持自动回充。移动平台上还设有急停等控制按钮,提高机器人的操作安全性。
6、进一步的,上述的复合消杀服务机器人,所述导航模块能导航、避障,包括激光雷达、超声波传感器、陀螺仪、安全触边传感器,所述激光雷达设于移动平台前侧,所述陀螺仪设于移动平台内部,所述超声波传感器设有多个,设于移动平台四周侧,所述安全触边传感器设于移动平台下周沿。通过导航模块,可保证消杀机器人在室内或者室外的环境下都能顺畅行走,保证消杀的顺利进行。
7、进一步的,上述的复合消杀服务机器人,所述消杀模块包括喷雾消杀组件和紫外消杀组件,所述喷雾消杀组件包括储液箱、喷管、喷口、喷雾机,所述储液箱设于上层平台内部,所述喷雾机设于储液箱口,所述喷管与喷雾机连通,所述喷管上端伸出上层平台的壳体,其顶部设有多个圆周均匀布置的喷口;所述紫外消杀组件包括灯罩、紫外灯管,所述灯罩底部固定在上层平台顶部并套设在喷管外部,所述灯罩内部设有多个圆周均匀布置的紫外灯管。消杀模块包括喷雾和紫外消杀两种模式,消杀程度更好。储液箱为大容积箱体,可储液10升,可保证长时间作业。
8、进一步的,上述的复合消杀服务机器人,所述上层平台、下层平台均包括壳体,其壳体上设有可拆装的门板。打开门板,可以对壳体内部的储液箱补充消毒液,也便于对壳体内的部件安装、维护。
9、进一步的,上述的复合消杀服务机器人,所述机体上还设有通讯模块,所述控制模块包括远程遥控平板,所述远程遥控平板设于上层平台上,与上层平台的门板可拆卸连接,所述控制模块通过通讯模块与远程控制中心通讯连接,通讯模块的设置位置不做限制。远程控制中心可通过通讯模块向控制模块发送消杀任务或者命令,控制模块可以通过通讯模块向远程控制中心上传数据,比如视频数据、图像数据、语音数据、各种传感器数据等等,远程控制中心可以通过上传的数据进行实时监控以及进行数据分析和统计等。
10、进一步的,上述的复合消杀服务机器人,所述执行机构包括法兰连接座、深度摄像头和电动夹爪,所述法兰连接座与协作机器人连接,所述深度摄像头与电动夹爪均固定在法兰连接座一侧,且所述深度摄像头设于电动夹爪上方。协作机器人为六轴机器人,自身具备碰撞检测、拖动示教、人机安全交互等功能。深度摄像头,用于完成垃圾的识别及定位,该相机具有小巧的外形,适用于近距离深度图像采集,具有较高的图像分辨率和采样帧率,适合做多种深度信息相关的应用开发。
11、本发明还提供一种复合消杀服务机器人的工作方法,其特征在于,包括以下步骤:
12、s1,创建消杀任务,通过现场身份认证或者远程控制创建消杀任务,现场身份认证创建进入步骤s2,远程控制创建进入步骤s3;
13、s2,通过安防模块对人员身份认证,并检测人员的体温及口罩佩戴情况,通过认证后创建消杀任务;
14、s3,操作人员通过通讯模块远程操作远程遥控平板(9)创建消杀任务;
15、s4,启动导航模块、环境监控模块,对消杀区域采集数据并建立消杀区域的环境地图,同时,采集消杀区域的环境参数;
16、s5,控制模块通过建立的环境地图及环境参数规划消杀路线及消杀方式;
17、s6,当消杀区域没有垃圾时,启动消杀模块消杀;消杀服务机器人移动到消杀区域,按照规划的消杀路线及消杀方式对消杀区域进行消杀,消杀完成后,回到充电桩位置自动回充;
18、其中,消杀方式至少包括紫外消杀、喷雾消杀的一种;开始紫外消杀时,开启杀菌灯,开始紫外消杀,完成紫外消杀任务后,服务机器人语音播报提示;开始喷雾消杀时,开启喷雾机,完成喷雾消杀后,服务机器人语音播报提示。
19、进一步的,上述的复合消杀服务机器人的工作方法,还包括步骤:s7,当消杀区域有垃圾时,启动消息模块消杀并启动清理模块清理垃圾;消杀服务机器人移动到消杀区域,按照规划的消杀路线及消杀方式对消杀区域进行消杀,在消杀过程中,当识别到消杀区域有污染垃圾时,深度摄像头(532)对污染垃圾进行识别及定位,然后协作机器人(51)控制电动夹爪(533)夹取垃圾并将垃圾放入垃圾桶(52),完成消杀后,导航运动至垃圾回收点,完成垃圾的清理,最后,回到充电桩位置自动回充。
20、与现有技术相比,本发明的有益效果是:智能化程度高,可远程操作,人员操作安全性高,并能对操作人事身份进行认证,避免不当人员的不当操作;且在消杀过程中,当识别到消杀区域有污染垃圾时,可对污染垃圾彻底清理,避免再污染,保证消杀干净彻底。
- 还没有人留言评论。精彩留言会获得点赞!