一种台车控制装置及手术机器人的制作方法
本发明涉及医疗器械,具体涉及一种台车控制装置及手术机器人。
背景技术:
1、随着医疗器械、计算机技术及控制技术的不断发展,微创手术以其手术创伤小、康复时间短、患者痛苦少等优点得到了越来越广泛的应用。而微创手术机器人以其高灵巧性、高控制精度、直观的手术图像等特点能够避免操作局限性,如过滤操作时手部的震颤等,广泛适用于腹腔、盆腔、胸腔等手术区域。
2、目前,微创手术机器人包括医生控制台和患者手术平台,医生控制台采集到医生的操作信号经控制系统处理后生成患者手术平台的控制信号,由患者手术平台执行手术操作。由于占地面积和设备成本的考量,医院通常无法配备多台微创手术机器人,因此患者手术平台经常需要从一个位置移动至另一个位置。例如,患者手术平台从手术室中的一个位置移动至同一手术室中的另一个位置,或者,患者手术平台从一个手术室移动至另一个手术室。但由于其重量大、体积大和复杂的机械构造,人工很难移动,因此出现了电动助力装置以帮助使用者移动患者手术平台。相应的,患者手术平台配备有控制电动助力装置的把手。
3、公开号为cn105050531a的中国专利公开了一种具有操控界面的外科患者侧手推车,其包括至少一个保持外科器械的操纵器部分和操控界面。操控界面可包括至少一个传感器,其被安置以感测使用者施加的以移动手推车的旋转力、向前力、向后力。操控界面可进一步包括连接机构,以可移除地连接操控界面与患者侧手推车。至少一个传感器可被放置以当操控界面处于与患者侧手推车的连接状态时与患者侧手推车的驱动控制系统信号连通。但该专利在四个方向设置了力传感器,成本较高,且采用多组弹簧来保证力检测准确性,导致结构复杂。
4、公告号为cn217138262u的中国专利公开了一种运动控制装置及手术台车,该运动控制装置包括安装座、限位导向装置和移动块;限位导向装置包括多个滚动件;滚动件分为两组滚动组件且分别设置在移动块的上表面和下表面上,且滚动件均对应抵触在安装座的内壁上;操作中心与移动块之间固定连接且用以对移动块施力;移动块沿着安装座的一个内壁平面进行运动。其利用限位导向装置,限定了移动块的活动范围,保证在推拉手柄的时候,移动块仅能在某一平面上进行运动,保证平移运动时的稳定性,因此不会发生跳动导致位移传感器传递信息出现偏差。但是该专利在操作把手时,会产生较大摩擦力,进而影响检测精度。
5、因此,需要设计一种可以解决结构复杂、力传递效率低等问题的手术机器装置。
技术实现思路
1、本发明针对现有技术存在的重量大、体积大和复杂的手术机器机构,以及人工移动难度大、力传递效率低等问题,提供了一种台车控制装置及手术机器人。
2、为实现上述目的,本发明采用的技术方案如下:
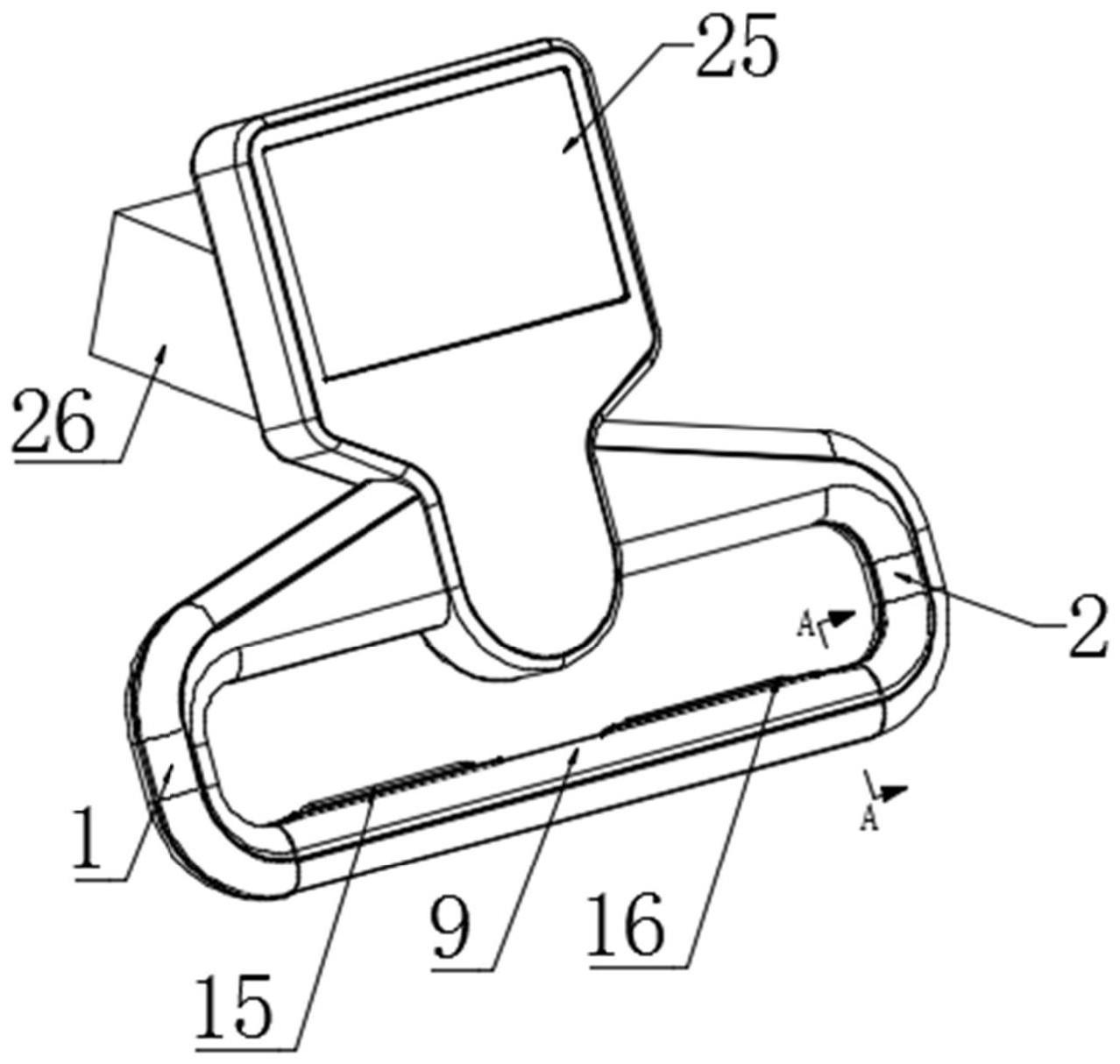
3、一种台车控制装置,包括连接臂组件、操控组件和传感器组件,连接臂组件包括第一连接臂和第二连接臂,传感器组件包括第一传感器和第二传感器;操控组件设于第一连接臂和第二连接臂之间,且一端通过第一传感器与第一连接臂连接,另一端通过第二传感器与第二连接臂连接;其中,第一传感器一部分容纳于操控组件,第一传感器另一部分容纳于第一连接臂;第二传感器一部分容纳于操控组件,第二传感器另一部分容纳于第二连接臂,且第一传感器和第二传感器类型相同。
4、基于上述技术方案,更进一步地,所述第一连接臂与第二连接臂结构相同;和/或,所述第一连接臂与第二连接臂均包括一体成型或固定相连的连接臂座与扶手基座。
5、基于上述技术方案,更进一步地,所述扶手基座一端设有第一凸部和第二凸部,第一凸部和第二凸部之间形成有容纳槽,第一传感器和第二传感器的一端分别固定于容纳槽内。
6、基于上述技术方案,更进一步地,所述操控组件设有触发盖板,第一传感器和第二传感器的另一端分别与触发盖板固定连接。
7、基于上述技术方案,更进一步地,触发盖板和第一连接臂之间设有第一传感器,第一传感器一端固定于第一连接臂的扶手基座上开设的容纳槽内,第一传感器另一端与触发盖板固定连接。
8、基于上述技术方案,更进一步地,所述触发盖板与第二连接臂之间设有第二传感器,第二传感器一端固定于第二连接臂的扶手基座上开设的容纳槽内,第二传感器另一端与触发盖板固定连接。
9、基于上述技术方案,更进一步地,所述第一凸部与触发盖板接触位置设有滑动件,滑动件用于减小接触位置的摩擦力。
10、基于上述技术方案,更进一步地,第一凸部向侧边外延伸一体成型设有第一凹部,第一凹部与第一凸部之间形成有夹角,夹角位置与触发盖板接触的一端之间夹设滑动件。
11、基于上述技术方案,更进一步地,所述连接臂座一端设有第三凸部,第三凸部下端面与第二凸部上端面配合,且第三凸部与触发盖板接触位置设有滑动件,滑动件用于减小接触位置的摩擦力。
12、基于上述技术方案,更进一步地,第二凸部上端面为一平面,第三凸部向外部延伸设有第二凹部,第二凹部与第三凸部一体成型,且第二凹部与第三凸部一体成型的下端面为一平面,该平面与第二凸部上端面配合,且第二凹部上端面和第三凸部侧面之间形成一夹角,该夹角位置与触发盖板接触的一端之间夹设滑动件。
13、基于上述技术方案,更进一步地,滑动件可选择平面轴承、平面滑轨、万向轮等具有减小摩擦力作用的部件,目的是使得操控组件相对于连接臂组件只能做水平方向的微小移动,且静摩擦力和滑动摩擦力都很小,以提高力传感器测量精度。
14、基于上述技术方案,更进一步地,所述操控组件包括触发基座,触发基座与触发盖板固定连接,且触发基座上设有l形容纳结构,l形容纳结构内安装有触发组件。
15、基于上述技术方案,更进一步地,第一传感器和第二传感器都为拉压力传感器。
16、一种手术机器人,包括一种台车控制装置,还包括底盘行走机构、立柱和底座,所述台车控制装置通过底座与立柱相连,并电连接到底盘行走机构。
17、基于上述技术方案,更进一步地,台车控制装置上设有触摸显示屏,用于人机交互至少调整立柱的高度。
18、相对于现有技术,本发明至少具有以下有益效果:
19、(1)本发明设置了两个拉压力传感器分别将相对应的操控组件和连接臂连接,且每个拉压力传感器均靠近设于相应的连接臂位置处,实现台车的前进、后退、转向动作,该结构的设置提高了力的传递效率和力的检测准确性,进而缩短了术前摆位的时间,提高了手术效率,由于各个部件都是机械连接,结构简单,使用成本低,优化用户使用感受。
20、(2)本发明在扶手基座、连接臂座与触发盖板的结合位置都相应设置了滑动件,使得操控组件相对于连接臂组件只能做水平方向的微小移动,且静摩擦力和滑动摩擦力都很小,几乎不会影响检测精度,进而提高控制精度。
技术特征:
1.一种台车控制装置,其特征在于,包括连接臂组件、操控组件和传感器组件,连接臂组件包括第一连接臂和第二连接臂,传感器组件包括第一传感器和第二传感器;
2.根据权利要求1所述的一种台车控制装置,其特征在于,所述第一连接臂与第二连接臂结构相同;和/或,所述第一连接臂与第二连接臂均包括一体成型或固定相连的连接臂座与扶手基座。
3.根据权利要求2所述的一种台车控制装置,其特征在于,所述扶手基座一端设有第一凸部和第二凸部,第一凸部和第二凸部之间形成有容纳槽,第一传感器和第二传感器的一端分别固定于容纳槽内。
4.根据权利要求3所述的一种台车控制装置,其特征在于,所述操控组件设有触发盖板,第一传感器和第二传感器的另一端分别与触发盖板固定连接。
5.根据权利要求4所述的一种台车控制装置,其特征在于,所述第一凸部与触发盖板接触位置设有滑动件,滑动件用于减小接触位置的摩擦力。
6.根据权利要求4所述的一种台车控制装置,其特征在于,所述连接臂座一端设有第三凸部,第三凸部下端面与第二凸部上端面配合,且第三凸部与触发盖板接触位置设有滑动件,滑动件用于减小接触位置的摩擦力。
7.根据权利要求4所述的一种台车控制装置,其特征在于,所述操控组件包括触发基座,触发基座与触发盖板固定连接,且触发基座上设有l形容纳结构,l形容纳结构内安装有触发组件。
8.根据权利要求1所述的一种台车控制装置,其特征在于,所述第一传感器和第二传感器都为拉压力传感器。
9.一种手术机器人,其特征在于,包括权利要求1-8任一项所述的台车控制装置,还包括底盘行走机构、立柱和底座,所述台车控制装置通过底座与立柱相连,并电连接到底盘行走机构。
10.根据权利要求9所述的一种手术机器人,其特征在于,所述台车控制装置上设有触摸显示屏,用于人机交互至少调整立柱的高度。
技术总结
本发明公开了一种台车控制装置及手术机器人,涉及医疗器械技术领域,台车控制装置包括连接臂组件、第一连接臂、第二连接臂、第一传感器和第二传感器;操控组件设于第一连接臂和第二连接臂之间,第一传感器一部分容纳于操控组件,第一传感器另一部分容纳于第一连接臂;第二传感器一部分容纳于操控组件,第二传感器另一部分容纳于第二连接臂。本发明设置了两个拉压力传感器分别将相对应的操控组件和连接臂连接,且每个拉压力传感器均靠近设于相应的连接臂位置处,实现台车的前进、后退、转向动作,提高了力的传递效率和力的检测准确性,进而缩短了术前摆位的时间,提高了手术效率。
技术研发人员:彭程,请求不公布姓名,徐敏
受保护的技术使用者:敏捷医疗科技(苏州)有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!