一种双机器人辅助上肢单侧的康复训练系统及其控制方法
本发明涉及康复机器人,特别是涉及一种双机器人辅助上肢单侧的康复训练系统及其控制方法。
背景技术:
1、近年来,脑卒中发病率呈不断上升趋势,其后遗留症极易引起上肢、下肢的运动功能障碍,严重影响患者的日常生活。依赖于康复医师手法治疗上下肢运动功能障碍的康复方案,存在医师数量短缺、任务繁重、康复效率低等众多局限性。康复机器人能够连续执行重复训练任务,可将康复医师从繁重、反复的训练任务中解脱出来,并利用康复机器人内嵌的各类传感器记录训练数据,为康复医师改进和优化康复方案提供了客观依据。
2、根据康复机器人的结构形式,目前面向脑卒中偏瘫患者的上肢康复机器人主要分为外骨骼式上肢康复机器人和末端引导式上肢康复机器人。外骨骼式上肢康复机器人,常设计为典型的仿生手臂结构形式,肩、肘、腕关节多数拟人体上肢对应关节分布特征布置,穿戴到上肢上,可对上肢各关节进行精确控制,以实现上肢的单关节独立运动和多关节复合运动,但在实际应用中往往要求机械轴线实时与肩关节轴线对齐或重合,容易出现人机运动不相容问题,且存在穿戴较复杂,成本较高的问题。
3、末端引导式上肢康复机器人,侧重关注末端手部的运动轨迹,其传感器往往只用于采集末端手部的位置和力信息,而对于上肢其他关节的运动学和力学信息缺乏有效反馈。并且该类机器人常用于辅助患者进行某一平面内的训练,无法较好实现立体空间的关节运动,尤其对于具备多自由度的肩关节,可实现的自由度数量以及关节活动范围均十分有限,从而导致机器人难以模拟上肢日常行为运动轨迹,实现复杂的康复训练内容。
技术实现思路
1、本发明的目的是提供一种双机器人辅助上肢单侧的康复训练系统及其控制方法,以实现两台机器人安全可靠地辅助人体上肢完成指定康复训练任务的目的。
2、为实现上述目的,本发明提供了如下方案:
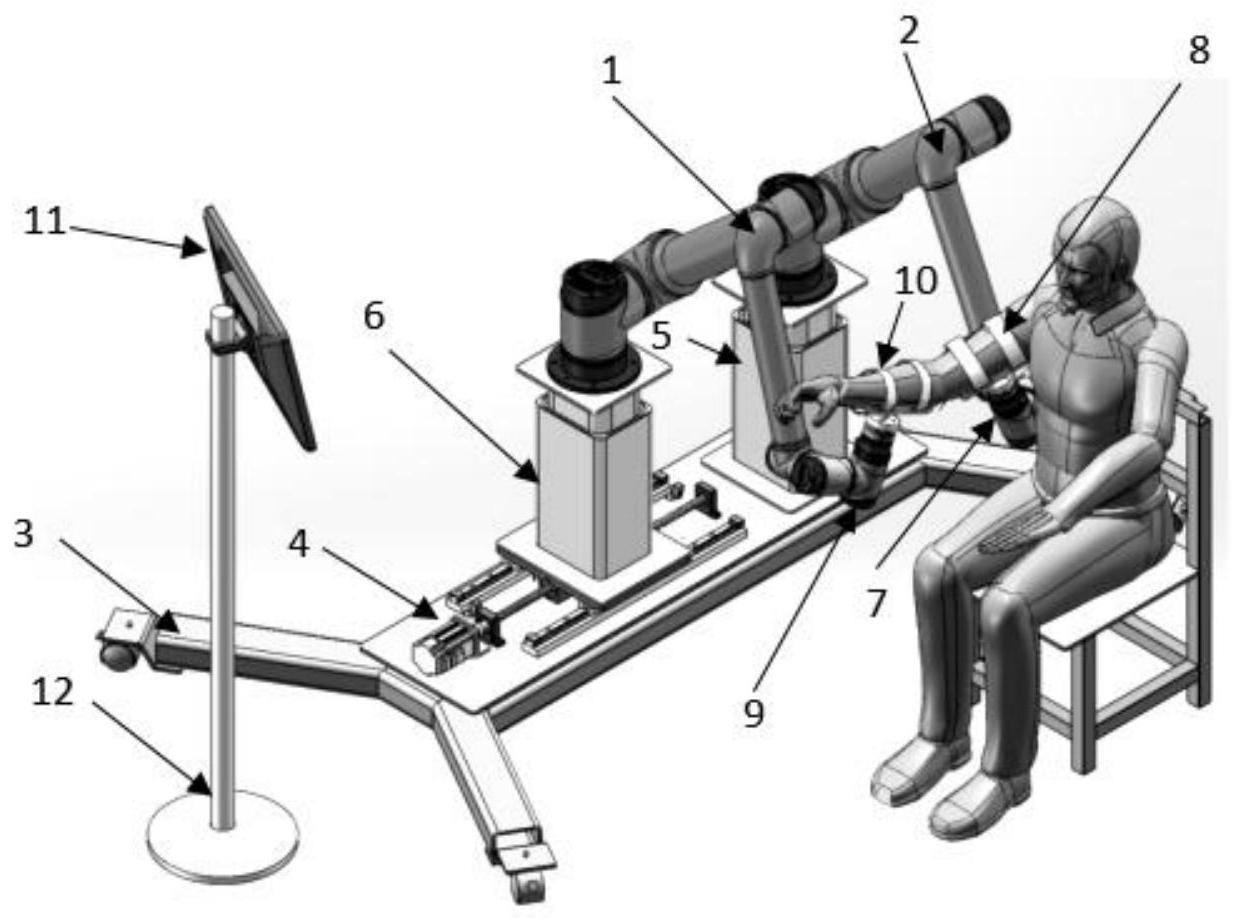
3、本发明提供了一种双机器人辅助上肢单侧的康复训练系统,包括:系统控制器、双机器人组件、底座组件以及手臂支撑组件;
4、所述双机器人组件包括第一机器人、第二机器人、第一机器人控制器和第二机器人控制器;其中,所述系统控制器能够通过所述第一机器人控制器和所述第二机器人控制器控制所述第一机器人和所述第二机器人按照预设轨迹运动;
5、所述底座组件包括底座以及设置在所述底座上的移动平台;其中,所述第一机器人通过第一升降柱连接在所述底座上,所述第二机器人通过第二升降柱连接在所述移动平台上;
6、所述手臂支撑组件包括第一快拆装置、第一支撑辅具、第二快拆装置和第二支撑辅具;其中,所述第一快拆装置的一端安装于第一机器人的末端,所述第一快拆装置的另一端用于快速拆卸与安装所述第一支撑辅具;所述第二快拆装置的一端安装于第二机器人的末端,所述第二快拆装置的另一端用于快速拆卸与安装所述第二支撑辅具;所述第一支撑辅具用于支撑上肢上臂区域;所述第二支撑辅具用于支撑上肢前臂区域。
7、本发明还提供了一种双机器人辅助上肢单侧的康复训练系统的控制方法,包括:
8、在患者上肢肢体穿戴到第一机器人和第二机器人之前,先由外界动力带动患者的上肢肢体按照期望轨迹运动,获取位于上肢肢体上的第一惯性传感器、第二惯性传感器和第三惯性传感器记录的运动信息,并根据记录的运动信息,确定从上肢上臂坐标系到上肢前臂坐标系的位姿变换矩阵、从上肢上臂坐标系到上肢肩关节坐标系的位姿变换矩阵以及从上肢肩关节坐标系到世界坐标系的位姿变换矩阵;其中,所述世界坐标系为第一机器人的基座坐标系;
9、通过第一机器人的位置信息、第二机器人的位置信息以及标定方法,确定从第二机器人的基座坐标系到第一机器人的基座坐标系的位姿变换矩阵;
10、通过对闭式运动链进行解耦求解单机器人运动链方程,并根据单机器人运动链方程、从第二机器人的基座坐标系到第一机器人的基座坐标系的位姿变换矩阵以及常数矩阵,确定从第一机器人的末端坐标系到第一机器人的基座坐标系的位姿变换矩阵以及从第二机器人的末端坐标系到第二机器人的基座坐标系的位姿变换矩阵;所述常数矩阵包括从第一支撑辅具坐标系到第一机器人的末端坐标系的位姿变换矩阵、从上肢上臂坐标系到第一机器人的末端坐标系的位姿变换矩阵、从第二支撑辅具坐标系到第二机器人的末端坐标系的位姿变换矩阵、以及从上肢前臂坐标系到第二支撑辅具坐标系的位姿变换矩阵;
11、根据训练模式、训练参数以及位姿变换矩阵集合,确定第一机器人在关节空间内的平滑运动轨迹和第二机器人在关节空间内的平滑运动轨迹;所述位姿变换矩阵集合包括从上肢上臂坐标系到上肢前臂坐标系的位姿变换矩阵、从上肢上臂坐标系到上肢肩关节坐标系的位姿变换矩阵、从上肢肩关节坐标系到世界坐标系的位姿变换矩阵、从第一机器人的末端坐标系到第一机器人的基座坐标系的位姿变换矩阵以及从第二机器人的末端坐标系到第二机器人的基座坐标系的位姿变换矩阵;
12、将第一机器人在关节空间内的平滑运动轨迹发送至第一机器人,将第二机器人在关节空间内的平滑运动轨迹发送至第二机器人,以控制第一机器人和第二机器人按照接收到的平滑运动轨迹进行运动,以实现双机器人的协调作业控制。
13、根据本发明提供的具体实施例,本发明公开了以下技术效果:
14、1.本发明使用双机器人分别作用于上肢前臂和上肢上臂,兼具有外骨骼机器人和末端引导式机器人的优势,通过对双机器人的协调控制,安全可靠地辅助人体上肢完成指定的康复训练任务。
15、2.双机器人与人体上肢构成了一个复杂的耦合闭式运动链,这对求解与规划双机器人的协作运动轨迹带来了挑战。本发明基于此场景,提出一种可行的双机器人协同作业控制方法,即通过对闭式运动链进行解耦求解单机器人运动链方程,借助于多个惯性传感器,求解从第一机器人的末端坐标系到第一机器人的基座坐标系的位姿变换矩阵以及从第二机器人的末端坐标系到第二机器人的基座坐标系的位姿变换矩阵,再结合matlab工具,求解双机器人关节空间运动轨迹,实现双机器人的协同作业控制。
16、3.控制方法充分考虑了双机器人之间、机器人与人体之间的相对位置布局关系,以及不同使用者的个体差异,从而可根据使用者的坐姿以及身高自适应调控双机器人的轨迹规划。
17、附图说明
18、为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
19、图1为本发明实施例提供的双机器人辅助单侧肢体进行康复训练的结构示意图;
20、图2为本发明实施例提供的移动平台的结构示意图;
21、图3为本发明实施例提供的快拆装置的结构示意图;
22、图4为本发明实施例提供的支撑辅具安装位置示意图;
23、图5为本发明实施例提供的双机器人辅助上肢康复训练系统的坐标系图;
24、图6为本发明实施例提供的惯性传感器安装位置示意图;
25、图7为本发明实施例提供的双机器人辅助上肢单侧的康复训练系统的控制方法的流程示意图。
- 还没有人留言评论。精彩留言会获得点赞!