一种踝关节康复机器人及控制方法
本发明涉及机器人,尤其涉及一种基于六轴机械臂的踝关节康复机器人及控制方法。
背景技术:
1、踝关节在人体行走过程中起着重要作用,由于运动损伤和疾病造成的踝关节功能障碍,如卒中、脊髓损伤、脚踝韧带损伤、踝关节骨折等,导致踝关节运动空间减小、踝关节肌肉肌力下降,最终致使患者的行走能力下降或丧失,因此需要对患者进行针对性的运动康复训练,恢复踝关节正常功能。康复机器人保证了康复治疗的针对性,减轻了治疗师的劳动强度,在相同的训练时间内,能够提供高强度的训练,提高康复训练的效率。踝关节康复机器人在构型上分类主要有平台固定式、移动穿戴式,驱动方式上主要有关节驱动、气压驱动和绳索驱动,在机构自由度方面,踝关节康复机器人主要包含1dof、2dof、3dof等。人体踝关节具备三个旋转自由度,可等效为球关节,康复机器人旋转中心应保证与踝关节中心重合,否则会牵连下肢其他关节运动,影响关节踝康复效果,进一步可能导致踝关节二次损伤。
2、现有技术方案,如专利号cn200710048317.2踝关节康复训练装置,基于串并联机构,3个转动自由度轴线相交,但与人体踝关节重心不重合;专利号cn201810034438.x一种六转动关节轴线汇交的踝关节康复装置,采用并联机构,动平台可绕中心点进行空间三维转动,但旋转中心没法自动调整;专利号202310021071.9欠驱动并联自对齐踝关节康复机器人及其控制方法,使用六自由度欠驱动并联机构,三个旋转自由度实现踝关节中心的重合,三个平移自由度需要患者主动调整,对患者控制能力有一定要求。
3、综上所述并结合现有技术进行分析,目前踝关节康复机器人大部分采用专门设计的并联机构来实现,模块化程度低,其中多数康复机器人旋转中心与踝关节中心不重合。由于患者个体差异而导致踝关节位置不同,现有通过三自由度并联机构实现踝关节中心重合的技术方案,由于机构尺寸固定而无法实现旋转中心的灵活调整。而且,现有方案中对姿态的调整灵活度低,对于卧床患者使用适应性较弱。另外,现有踝关节康复机器人方案缺少对肌张力评定的功能,对患者康复进程较难把控。
技术实现思路
1、为了解决上述现有技术中问题,本发明提出一种踝关节康复机器人及控制方法,具体技术方案如下:
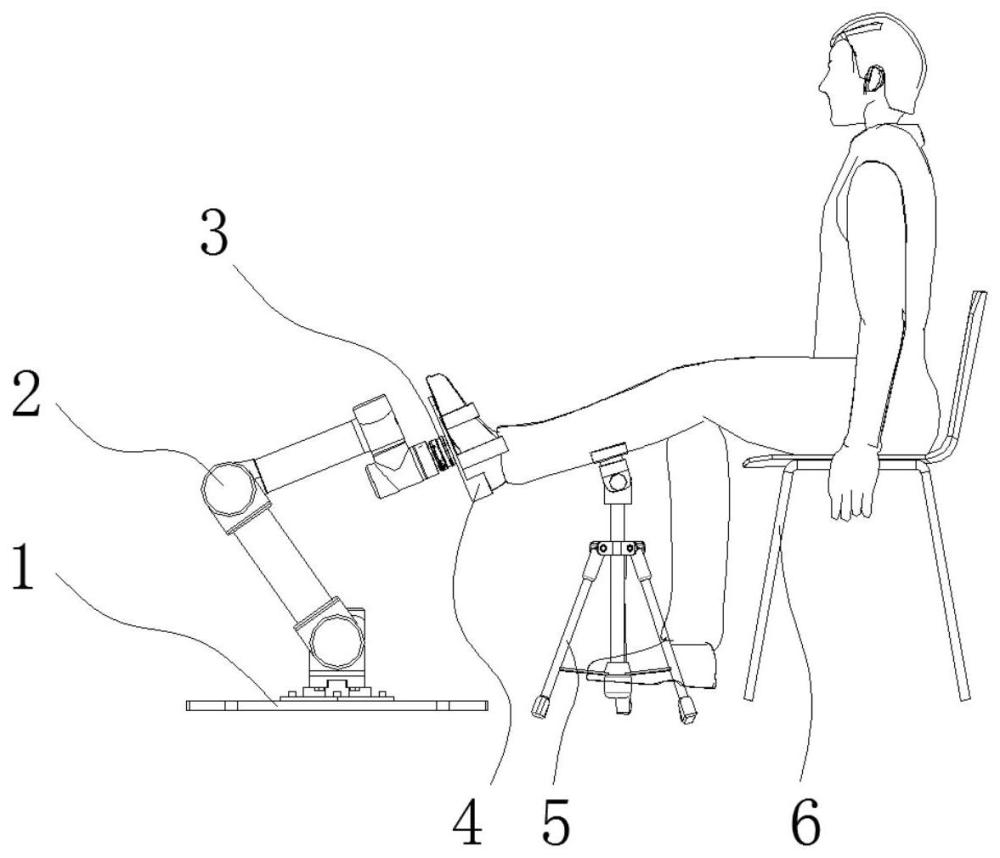
2、一种踝关节康复机器人包含机器人底座、六自由度机械臂、六维力传感器、足托、腿托和控制系统;所述的六自由度机械臂安装在底座上,六维力传感器安装在六自由度机械臂末端,足托安装在六维力传感器上;所述的足托上安装有限位和约束结构;所述的腿托高度和角度可调整,一端放置于地面,另一端与患者小腿配合绑定;机器人控制系统可采集六维力传感器数据,控制机械臂实现各种模式的踝关节康复训练。
3、通过六自由度机械臂的位置和姿态控制,可实现患者坐立,仰卧等不同体位的踝关节康复训练,保证机器人运动与踝关节中心的重合,通过机械臂姿态解算测量踝关节绕轴转动角度并进行关节活动度评定。六维力传感器用于感知患者与机器人之间的交互力/力矩,实现各种康复训练模式的柔顺控制,通过六维力传感器测量绕踝关节各轴线的力矩来进行踝关节运动肌力评定。
4、为适应不同患者踝关节旋转中心的差异,本发明提出了方便调整康复机器人旋转中心,使之与踝关节中心重合匹配的控制方法。所述机器人旋转中心与踝关节中心重合控制方法,具体流程如下:
5、s1:康复训练前,测量患者内踝尖、外踝尖相对机械臂末端坐标系原点所在水平面距离,分别为z1和z2,计算得到踝关节中心在人体垂直轴方向上,与机械臂末端坐标系原点水平面距离
6、s2:测量患者内踝尖、外踝尖相对机械臂末端坐标系原点所在冠状面距离,分别为y1和y2,计算得到踝关节中心在人体纵轴方向上,与机械臂末端坐标系原点距离
7、s3:测量患者内踝尖、外踝尖相对机械臂末端坐标系原点所在矢状面距离,分别为x1和x2,计算得到踝关节中心在人体横轴方向上,与机械臂末端坐标系原点距离
8、s4:建立踝关节中心坐标系{a},以踝关节中心a为原点,方向与机械臂末端坐标系{e}方向相同,得到坐标系{a}相对坐标系{e}的齐次变换矩阵
9、s5:由踝关节坐标系{a}位置不变,姿态变换,计算得到机械臂末端坐标系{e}的位姿变换;
10、s6:由机械臂逆解算法,计算得到各机械臂各关节角,对机械臂各关节进行角度控制,实现机器人绕踝关节中心坐标系{a}位置不变,姿态旋转。
11、为实现康复机器人的柔顺训练效果,本发明提出了一种既能保证机器人旋转中心位置不变,又能实现机械臂柔顺交互的控制方法,具体流程如下:
12、s1:患者通过足托及六维力传感器交互,经过滤波得到绕x、y、z三个方向的力矩[tx ty tz];
13、s2:力矩经过重力补偿算法,去除足托重力产生力矩的影响,获得踝关节施加在六维力传感器上的实际力矩ma,并与设置的阈值mthr比较,得到输入力te=ma-mthr;
14、s3:输入力矩te通过计算,得到机器人笛卡尔空间旋转加速度经过δt积分得到旋转速度再经过δt积分得到旋转角度δ,并输入到公式中进行迭代计算;
15、s4:笛卡尔空间的旋转速度左乘逆雅可比矩阵(在踝关节中心坐标系{a}中的雅可比矩阵),计算得到关节空间角速度
16、s5:关节空间角速度经过δt积分,得到机械臂各轴关节角补偿量δθ,并与预定义轨迹关节角θd相加;
17、s6:补偿后的关节角通过控制器下发给机械臂执行,实现机械臂绕踝关节中心坐标系{a}位置不变,且绕x、y、z方向进行柔顺运动。
18、以上控制方法通过对六维力传感器笛卡尔空间方向的力进行屏蔽,利用三个方向上的力矩进行柔顺控制,通过改变m、k和b参数从而调节柔顺控制效果,并且通过踝关节中心坐标系{a}中的雅可比矩阵计算,实现了机器人旋转中心位置不变。
19、为了实现对患者踝关节肌张力进行评定的功能,把控患者康复进程,本发明提出了一种基于机械臂力感知的肌张力评定方法,评定踝关节背伸和屈曲运动的肌张力等级,具体流程如下:
20、s1:设置机器人旋转运动,背伸为24°和屈曲为-40°,运动时间为1s,正常阻抗力矩阈值m1,参考力矩阈值m2,安全保护力矩阈值m3;
21、s2:机器人带动患者踝关节转动,同时采集六维力传感器的力矩值;
22、s3:将背伸和屈曲64°活动范围等分成4部分,分析采集力矩值在4个部分中的分布情况,并于踝关节设置力矩对比;
23、s4:机器人带动踝关节运动并进行等级划分,具体如下;
24、s41:在踝关节-40°~24°范围内,力矩曲线波动较小,采集力矩值小于踝关节正常阻抗力矩m1,对应mas等级为0级;
25、s42:在踝关节运动范围末端8°~24°活动范围内,采集力矩值大于踝关节参考力矩阈值m2,对应mas等级为1级;
26、s43:在踝关节运动范围末端-8°~24°活动范围内,采集力矩值大于踝关节参考力矩阈值m2,对应mas等级为1+级;
27、s44:在大于48°的踝关节活动范围内,采集力矩值大于踝关节参考力矩m2,对应mas等级为2级;
28、s45:在踝关节运动范围内大于保护力矩m3,机器人停止运动,对应mas等级为3级。
29、基于所述的机械臂柔顺交互控制方法,本发明提供了三种康复训练方法,即被动康复训练、主动康复训练和抗阻康复训练。
30、所述被动康复训练适用于患者在康复前期,其中姿态控制器为机械臂内部控制器,六维力传感器检测到异常动作交互力/力矩,经过重力补偿得到踝关节实际受力/力矩,当超过阈值mthr时,以差值输入到柔顺控制器中,输出得到轨迹角度差值,修正预设轨迹,达到柔顺效果。
31、所述主动康复训练适用于患者在康复中期,患者肌肉力量逐渐恢复,具备一定的主动运动能力,关节可以实现一定范围内的运动,经过主动康复训练可以强化患者的肌肉,摆脱被动训练中患者处于完全被动的状态,激发患者的主动运动意识,从而提高康复效率。
32、所述抗阻康复训练适用于患者在康复后期,通过抗阻康复训练进一步增强肌力,患者主动地控制脚踝运动,灵活带着康复机器人运动,恢复运动范围和本体感觉。
- 还没有人留言评论。精彩留言会获得点赞!