基于点云技术的空间导航方法、装置、系统、存储介质与流程
本发明涉及手术导航,特别涉及一种基于点云技术的空间导航方法、装置、系统、存储介质。
背景技术:
1、传统内放疗介入手术,医师需要在ct影像和超声设备的辅助下,徒手将导引针穿刺至人体肝脏内的病灶处,并通过顶针将放射性粒子植入到肿瘤内部。此过程需医师通过肉眼识别成像设备图像,并结合经验、手部阻力,在大脑中进行空间位置的想象及操作决策,该过程医师面临的主要痛点为,手术过程中对于病灶处的空间位置,难以精准定位。介入内放疗机器人的出现极大的解决了这一难题,机器人对于手术动作的标准执行,在克服了医师手动完成植入动作的不确定性同时,亦可根据需求精确的到达指定数字肿瘤位置位置。并通过机器人辅助系统进行放射性粒子植入操作。
2、为了实现介入内放疗机器人的路径导航,通常会设置一台可拍摄的设备作为路径规划设备,但是每个病患的体型不同,仅通过对病患的图像识别进行导航很难确保路径的准确性。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种基于点云技术的空间导航方法、装置、系统、存储介质,能够通过标志物实现导航设备的辅助定位,提高导航路径的准确性。
2、第一方面,本发明实施例提供了一种基于点云技术的空间导航方法,应用于智能手术系统,所述智能手术系统包括点云导航设备和机械臂,所述基于点云技术的空间导航方法包括:
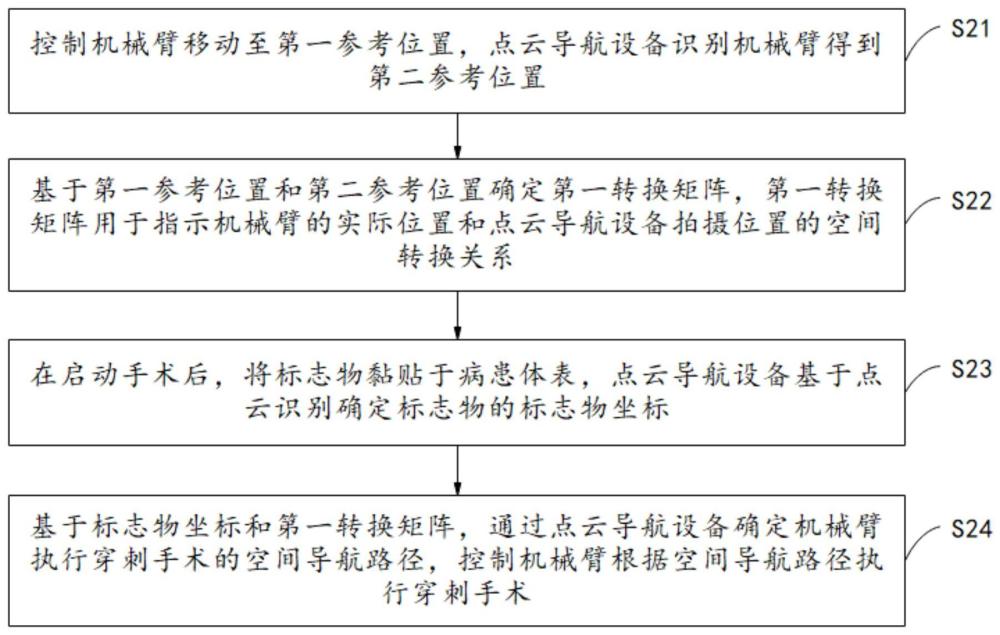
3、控制所述机械臂移动至第一参考位置,所述点云导航设备识别所述机械臂得到第二参考位置;
4、基于所述第一参考位置和所述第二参考位置确定第一转换矩阵,所述第一转换矩阵用于指示所述机械臂的实际位置和所述点云导航设备拍摄位置的空间转换关系;
5、在启动手术后,将标志物黏贴于病患体表,所述点云导航设备基于点云识别确定所述标志物的标志物坐标;
6、基于所述标志物坐标和所述第一转换矩阵,通过所述点云导航设备确定所述机械臂执行穿刺手术的空间导航路径,控制所述机械臂根据所述空间导航路径执行穿刺手术。
7、根据本发明的一些实施例,所述标志物包括型体物、支座和双面胶,所述型体物安装于所述支座的上侧,所述双面胶固定连接于所述支座,所述型体物为非对称形状,所述型体物的材料为尼龙,所述型体物的颜色为紫色,所述型体物的上表面为磨砂面;所述支座的材料为医用pc。
8、根据本发明的一些实施例,所述标志物文件为st l文件,所述将所述标志物文件导入所述点云导航设备,通过所述点云导航设备基于点云识别确定所述标志物的标志物坐标,包括:
9、将所述标志物的st l文件导入所述点云导航设备,所述点云导航设备通过解析所述st l文件得到所述标志物的三维模型;
10、基于所述三维模型确定所述标志物的标志物形状;
11、拍摄病患图像,基于所述标志物形状和点云识别从所述病患图像中定位出所述标志物,并确定所述标志物坐标。
12、根据本发明的一些实施例,所述点云导航设备识别所述机械臂得到第二参考位置,包括:
13、获取多个预设的拍摄位置集,其中,所述拍摄位置集包括多个可用拍摄位置;
14、从所述拍摄位置集选取一个所述可用拍摄位置作为所述参考拍摄位置;
15、控制所述点云导航设备在所述参考拍摄位置拍摄所述标定板的标定图像后记录候选参考位置,选取另一个所述可用拍摄位置作为新的参考拍摄位置进行拍摄,直到遍历完所述拍摄位置集;
16、基于全部的所述候选参考位置确定所述第二参考位置。
17、根据本发明的一些实施例,所述基于所述标志物坐标和所述第一转换矩阵,通过所述点云导航设备确定所述机械臂执行穿刺手术的空间导航路径,包括:
18、获取病患的数字人体,基于所述数字人体、所述标志物坐标和所述第一转换矩阵确定第二转换矩阵,所述第二转换矩阵用于指示所述数字人体与实际人体的空间转换关系;
19、获取基于数字人体规划的手术规划路径,通过所述点云导航设备基于所述第二转换矩阵和所述手术规划路径确定所述空间导航路径。
20、根据本发明的一些实施例,所述控制所述机械臂根据所述空间导航路径执行穿刺手术,包括:
21、控制所述机械臂根据所述空间导航路径移动至目标穿刺位置;
22、通过所述点云导航设备基于所述数字人体所记载的数字肿瘤位置、所述目标穿刺位置和所述第二转换矩阵确定实际肿瘤位置;
23、基于目标穿刺位置和所述实际肿瘤位置的高度差控制所述机械臂向下移动并穿刺至所述实际肿瘤位置。
24、根据本发明的一些实施例,所述机械臂还设置有多线雷达,所述控制所述机械臂根据所述空间导航路径移动至目标穿刺位置,包括:
25、在所述机械臂移动过程中,通过所述多线雷达进行碰撞检测;
26、当所述碰撞检测的检测结果指示存在碰撞风险,通过所述点云导航设备基于所述机械臂的当前位置重新规划所述空间导航路径。
27、第二方面,本发明实施例提供了一种基于点云技术的空间导航装置,包括少一个控制处理器和用于与所述至少一个控制处理器通信连接的存储器;所述存储器存储有可被所述至少一个控制处理器执行的指令,所述指令被所述至少一个控制处理器执行,以使所述至少一个控制处理器能够执行如上述第一方面所述的基于点云技术的空间导航方法。
28、第三方面,本发明实施例提供了一种智能手术系统,包括有如上述第二方面所述的基于点云技术的空间导航装置。
29、第四方面,本发明实施例提供了一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行如上述第一方面所述的基于点云技术的空间导航方法。
30、根据本发明实施例的基于点云技术的空间导航方法,至少具有如下有益效果:控制所述机械臂移动至第一参考位置,所述点云导航设备识别所述机械臂得到第二参考位置;基于所述第一参考位置和所述第二参考位置确定第一转换矩阵,所述第一转换矩阵用于指示所述机械臂的实际位置和所述点云导航设备拍摄位置的空间转换关系;在启动手术后,将标志物黏贴于病患体表,所述点云导航设备基于点云识别确定所述标志物的标志物坐标;基于所述标志物坐标和所述第一转换矩阵,通过所述点云导航设备确定所述机械臂执行穿刺手术的空间导航路径,控制所述机械臂根据所述空间导航路径执行穿刺手术。根据本发明实施例的技术方案,能够在术前对机械臂和点云导航设备的位置关系校准,术中将标志物贴于病患体表,使得点云导航设备以标志物作为位置参考实现机械臂的导航,提高了点云导航设备的导航准确性。
技术特征:
1.一种基于点云技术的空间导航方法,其特征在于,应用于智能手术系统,所述智能手术系统包括点云导航设备和机械臂,所述基于点云技术的空间导航方法包括:
2.根据权利要求1所述的基于点云技术的空间导航方法,其特征在于,所述标志物包括型体物、支座和双面胶,所述型体物安装于所述支座的上侧,所述双面胶固定连接于所述支座,所述型体物为非对称形状,所述型体物的材料为尼龙,所述型体物的颜色为紫色,所述型体物的上表面为磨砂面;所述支座的材料为医用pc。
3.根据权利要求1所述的基于点云技术的空间导航方法,其特征在于,所述标志物文件为stl文件,所述将所述标志物文件导入所述点云导航设备,通过所述点云导航设备基于点云识别确定所述标志物的标志物坐标,包括:
4.根据权利要求1所述的基于点云技术的空间导航方法,其特征在于,所述点云导航设备识别所述机械臂得到第二参考位置,包括:
5.根据权利要求1所述的基于点云技术的空间导航方法,其特征在于,所述基于所述标志物坐标和所述第一转换矩阵,通过所述点云导航设备确定所述机械臂执行穿刺手术的空间导航路径,包括:
6.根据权利要求5所述的基于点云技术的空间导航方法,其特征在于,所述控制所述机械臂根据所述空间导航路径执行穿刺手术,包括:
7.根据权利要求1所述的基于点云技术的空间导航方法,其特征在于,所述机械臂还设置有多线雷达,所述控制所述机械臂根据所述空间导航路径移动至目标穿刺位置,包括:
8.一种基于点云技术的空间导航装置,其特征在于,包括至少一个控制处理器和用于与所述至少一个控制处理器通信连接的存储器;所述存储器存储有可被所述至少一个控制处理器执行的指令,所述指令被所述至少一个控制处理器执行,以使所述至少一个控制处理器能够执行如权利要求1至7任一项所述的基于点云技术的空间导航方法。
9.一种智能手术系统,其特征在于,包括权利要求8所述的基于点云技术的空间导航装置。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机可执行指令,所述计算机可执行指令用于使计算机执行如权利要求1至7任一项所述的基于点云技术的空间导航方法。
技术总结
本发明提出了基于点云技术的空间导航方法、装置、系统、存储介质,该方法包括:控制机械臂移动至第一参考位置,点云导航设备识别机械臂得到第二参考位置;基于第一参考位置和第二参考位置确定第一转换矩阵;在启动手术后,将标志物黏贴于病患体表,点云导航设备基于点云识别确定标志物的标志物坐标;基于标志物坐标和第一转换矩阵,通过点云导航设备确定机械臂执行穿刺手术的空间导航路径,控制机械臂根据空间导航路径执行穿刺手术。根据本发明实施例的技术方案,能够在术前对机械臂和点云导航设备的位置关系校准,术中将标志物贴于病患体表,使得点云导航设备以标志物作为位置参考实现机械臂的导航,提高了点云导航设备的导航准确性。
技术研发人员:陈鹏,王澄,张渡,蔡占川
受保护的技术使用者:珠海横乐医疗科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!