一种力反馈手术机器人系统及力反馈实现方法与流程
本发明涉及介入手术机器人,尤其涉及一种力反馈手术机器人系统及力反馈实现方法。
背景技术:
1、现有的介入机器人在进行血管介入手术时,医生通过遥控操作控制机器人末端执行手术动作。目前,医生在使用导丝导管等细长型器械在血管内操作过程中,无法感知器械在动作过程中受到的阻力情况,不利于医生的决策判断。
2、目前,行业内的手术机器人产品很少有能够提供力反馈功能。少数的研究方案也相对复杂,需要借助数量不少的力传感器去感知受力情况,不利于执行末端的灵活布局,而且针对导丝导管等细长型器械通常无法集成力传感器以感知其在血管中所受阻力。
3、此外,现有的机器人力反馈算法复杂,其应用于实现手术机器人末端的力反馈,使得手术机器人力反馈系统复杂度非常高,且实际效果有待验证。而且,现有的手术机器人力反馈系统普遍无法让医生直观地感受到机器人末端在手术过程中所受的阻力。
4、以上背景技术内容的公开仅用于辅助理解本发明的发明构思及技术方案,其并不必然属于本专利申请的现有技术,也不必然会给出技术教导;在没有明确的证据表明上述内容在本专利申请的申请日之前已经公开的情况下,上述背景技术不应当用于评价本技术的新颖性和创造性。
技术实现思路
1、本发明的目的是提供一种力反馈手术机器人系统及力反馈实现方法,能够更加容易和直观的让施力对象感知手术机器人末端所受的阻力大小。
2、为达到上述目的,本发明采用的技术方案如下:
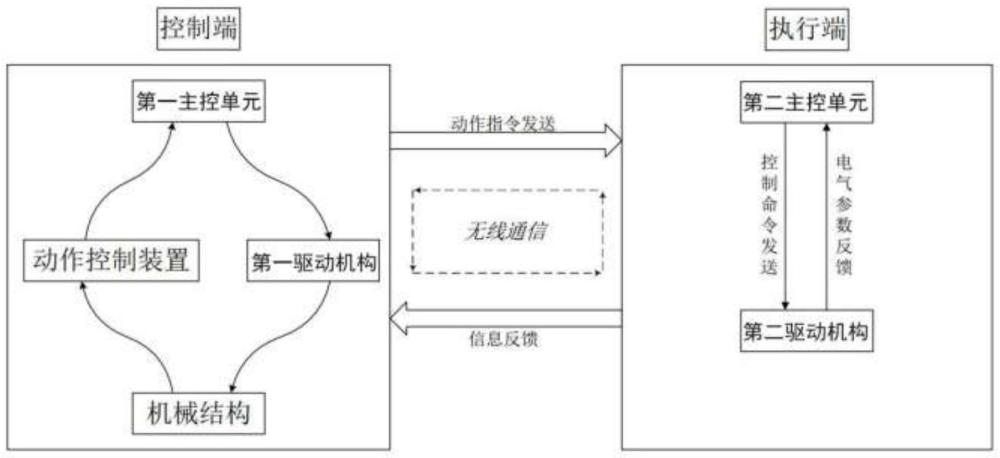
3、一种力反馈手术机器人系统,用于反馈机器人末端所受阻力,包括电连接的控制端和执行端,所述控制端包括第一主控单元、第一驱动机构、机械机构和动作控制装置,其中,所述机械机构与所述动作控制装置联动连接;所述执行端包括第二主控单元和第二驱动机构;
4、所述第二驱动机构被配置为驱动手术机器人末端执行手术动作;
5、所述第二主控单元与所述第二驱动机构和所述第一主控单元分别电连接,其被配置为实时采集所述第二驱动机构的电气参数并传输至所述第一主控单元,所述电气参数包括所述第二驱动机转速和其输入的电流;
6、所述第一主控单元与所述第一驱动机构电连接,其被配置为当判断出当前采样时刻相比上次采样时刻所述转速下降超过5%且不为零且所述电流增加超过一预设值时,则根据所述电气参数中的一种或多种生成第一控制指令并传输至所述第一驱动机构;
7、所述第一驱动机构与所述机械机构驱动连接,其被配置为响应于接收所述第一控制指令,进而驱动所述机械机构运动和/或发生形变。
8、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述动作控制装置,与所述第一主控单元电连接,其还被配置为在驱动下产生相应的动作信号并传输至所述第一主控单元;
9、所述第一主控单元与所述第二主控单元电连接,其被配置为响应于接收到所述动作信号,并根据所述动作信号生成第二控制指令并传输至所述第二主控单元;
10、所述第二主控单元被配置为响应于接收到所述第二控制指令,则根据所述第二控制指令生成第三控制指令并传输至所述第二驱动机构;
11、所述第二驱动机构被配置为响应于接收到所述第三控制指令,进而驱动手术机器人末端执行手术动作。
12、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述机械机构被配置为在其运动和/或发生形变的情况下联动所述动作控制装置,使所述动作控制装置与其当前运动相反。
13、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述机械机构的运动量与所述电流的变化量正相关;和/或,
14、所述机械机构运动的形变量与所述电流的变化量正相关。
15、进一步地,承前所述的任一技术方案或多个技术方案的组合,若当前采样时刻相比于上次采样时刻所述转速下降超过5%且不为零且所述电流增加超过一预设值,则机器人末端承受一阻力;
16、所述第二驱动机构为一伺服系统,所述阻力通过以下公式计算得到:
17、
18、其中,f阻为所述阻力,δi为所述电流的变化量,k为伺服系统的转矩常数,r为伺服系统中的驱动齿轮半径。
19、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述系统还包括一显示屏,所述显示屏被配置为显示所述阻力的大小。
20、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述机械机构运动和/或发生形变,进而联动所述动作控制装置;
21、所述动作控制装置响应于被所述机械结构联动,则生成一输入信号并传输至所述第一主控单元;
22、所述第一主控单元响应于接收到所述输入信号,则生成第四控制指令并传输至所述第二主控单元;
23、所述第二主控单元被配置为响应于接收到所述第四控制指令,则根据所述第四控制指令生成第五控制指令并传输至所述第二驱动机构;
24、所述第二驱动机构被配置为响应于接收到所述第五控制指令,进而停止驱动手术机器人末端。
25、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述系统还包括提示器,所述动作控制装置响应于被所述机械结构联动,则触发所述提示器发出提示信号。
26、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述动作控制装置为摇杆,所述摇杆被配置为能够在一定行程内和/或一定角度内被推动;
27、所述机械机构被配置为在其运动和/或发生形变的情况下联动所述摇杆,以使所述摇杆被推动时受阻。
28、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述第二驱动机构为一伺服系统,其包括智能驱动器,所述智能驱动器被配置为采集并存储所述第二驱动机构的电气参数;
29、所述第二主控单元被配置为采集所述智能驱动器获取的所述电气参数。
30、进一步地,承前所述的任一技术方案或多个技术方案的组合,所述第一驱动机构为一伺服系统;和/或,
31、所述控制端和所述执行端被配置为通过无线通信模块无线连接;和/或,
32、所述第二主控单元与所述第二驱动机构通过can总线电连接。
33、根据本发明的另一方面,本发明提供了一种力反馈实现方法,利用如上任一技术方案或多个技术方案的组合所述的力反馈手术机器人系统实现反馈机器人末端所受阻力,包括以下步骤:
34、配置所述第二驱动机构驱动手术机器人末端执行手术动作;
35、第二主控单元实时采集第二驱动机构的电气参数并传输至所述第一主控单元,所述电气参数包括所述第二驱动机转速和其输入的电流;
36、若当前采样时刻相比上次采样时刻所述转速下降超过5%且不为零且所述电流增加超过一预设值时,则第一主控单元根据所电流的变化量生成第一控制指令并传输至第一驱动机构;
37、第一驱动机构接收所述第一控制指令,则驱动所述机械机构运动和/或发生形变,进而联动动作控制装置。
38、本发明提供的技术方案带来的有益效果如下:
39、a.本发明通过获取执行端的第二驱动机构的电流和速度,根据第二驱动机构的电流和速度的变化判断手术机器人末端是否受阻力,若受阻力则通过控制端的第一驱动机构和机械机构将手术机器人末端的阻力反馈到动作控制装置,能够让医生直观地感受到机器人末端在手术过程中所受的阻力;
40、b.本发明提供的力反馈手术机器人系统结构简单、力反馈实现方法简单,建立了手术机器人末端受到的阻力与执行端伺服系统的输入电流的变化量、转矩常数和驱动齿轮半径之间的关系,不需要在手术机器人末端集成力传感器,就能够实时有效准确地反馈机器人末端所受的阻力,而且成本低、适用范围广;
41、c.本发明提供的力反馈手术机器人在判断手术机器人末端受到阻力时,会通过控制端的第一主控单元向执行端发送第四控制指令,以使执行端地第二驱动单元停止驱动手术机器人末端执行手术动作,能够防止误操作,进一步降低手术风险。
- 还没有人留言评论。精彩留言会获得点赞!