一种基于机器人的疾控辅助装置及系统的制作方法
本发明具体涉及一种基于机器人的疾控辅助装置及系统,属于疾控辅助装置。
背景技术:
1、咽拭子核酸检测一直是一种有效判别生物以及环境是否携带新冠病毒的有效手段,目前咽拭子核酸检测前的核酸采样工作主要依赖医务工作者穿戴防护服进行采样;核酸采样时需要医务工作者手动扫码绑定用户信息,并且手工发放和收取采集管,整个核酸采样过程需要医务工作者的辅助操作才能完成;医务人员工作强度大和存在感染风险,因此,现有技术中,部分采用机器人的疾控辅助装置进行辅助采样,如中国专利公开号:cn115100388a,一种自助核酸采样系统及方法,能够实现核酸采样的无人化操作,实现对核酸采样流程的监控,降低核算采样的成本,提升核酸检测结果的准确性;但该方案目的是判断采样是否合规,在检测过程中,容易存在交叉感染问题。
技术实现思路
1、为解决上述问题,本发明提出了一种基于机器人的疾控辅助装置及系统,能够实现往复于各个采集点,并能够对采集者进行面部识别、体温监测和取样前后的自动消毒,避免交叉感染。
2、本发明的基于机器人的疾控辅助装置,包括:
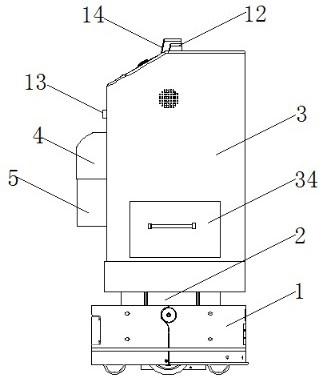
3、机器人底座,所述机器人底座包括电动行走小车,所述电动行走小车顶面设置有电动回转台;电动行走小车采用双轮差速驱动的行走轮,能够驱动机体自由行走,并可通过电动回转台调整方位;
4、机体,所述机体固定于电动回转台的回转端;所述机体内侧设置有整机控制的控制器;
5、检测操作仓,所述检测操作仓包括设置于机体前侧的第一槽座和第二槽座,所述第一槽座和第二槽座与机体内部连通;所述第一槽座和第二槽座于开口顶面和底面分别设置有滑道和滑轨;所述滑道和滑轨内滑动设置有盖板,所述滑道和机体之间设置有第一气缸和滑座,所述滑座与盖板端部一体制成;所述第一气缸固定于第二槽座顶面;所述第一气缸与滑座固定;
6、消毒模块,所述消毒模块包括设置于第一槽座和第二槽座内侧的雾化喷头,所述雾化喷头通过压力泵连接到消毒剂储罐;所述消毒剂储罐设置于机体内侧;
7、采样套装供料机构,所述采样套装供料机构设置于机体内侧,所述采样套装供料机构出料端与第一槽座内侧连通;
8、采样回收机构,所述采样回收机构设置于机体内侧,所述采样回收机构进料端与第二槽座内侧连通;
9、红外体温筛查仪,所述红外体温筛查仪设置于机体上部;
10、扫码机构,所述扫码机构设置于机体前侧;
11、人脸识别摄像头,所述人脸识别摄像头设置于机体前侧。
12、工作时,电动行走小车驱动机体行进到采集位,此时,采集对象面对机体,机体通过人脸识别摄像头或扫码机构获取采集对象的个人信息,在个人信息采集时,红外体温筛查仪同步获取采集对象的体温,当完成身份识别后,控制器给采样套装供料机构信号,采样套装供料机构将一套采样套装送入到第一槽座,接着,控制器给第一气缸信号,第一气缸驱动滑座和盖板同步滑动,盖板对第一槽座进行封闭,此时,消毒模块动作,压力泵将消毒剂储罐内的消毒剂抽出,并通过雾化喷头雾化后,对第一槽座内侧进行杀毒,完成杀毒后,第一气缸驱动滑座和盖板同步滑动,重新打开第一槽座,采集对象取出采样套装,采集对象取出拭子进行取样,完成取样后,将拭子截断投入到采样管内,并进行封闭,接着,将采样管的条码对准扫码机构,控制器获取扫码后,将条码与采集对象个人信息绑定,接着控制器给采样回收机构信号,采样回收机构进料端延伸到第二槽座内侧,此时,采集对象将采样管放置到采样回收机构进料端,控制器给第一气缸信号,第一气缸驱动滑座和盖板同步滑动,盖板对第二槽座进行封闭,此时,消毒模块动作,压力泵将消毒剂储罐内的消毒剂抽出,并通过雾化喷头雾化后,对第二槽座和采样管外壁内侧进行杀毒,完成杀毒后,采样回收机构将采样管送入到机体内部,并送入到采样管收集箱;完成取样,控制器将采集对象个人信息、体温数据和采样管的条码绑定,并远传至远控终端。
13、进一步地,所述采样套装供料机构包括支撑轴座,所述支撑轴座上通过轴承设置有旋转轴,所述支撑轴座外部固定有与旋转轴连接的供料电机;所述旋转轴上间隔设置有多个隔板,所述支撑轴座顶面固定有底面中空的套装储料盒;所述隔板顶面与套装储料盒顶面活动贴合,所述支撑轴座于隔板底面设置有导料板,所述导料板与第一槽座内侧连通。采样套装供料机构操作时,将完成抽真空的多组采样套装送入到套装储料盒,当供料电机转动设定角度后,通过相邻两个隔板和套装储料盒底部形成的料仓夹持一个采样套装,并将采样套装旋转送入到导料板,通过导料板将采样套装送入到第一槽座内侧。
14、进一步地,所述套装储料盒底面一体制成有弧形导向部;所述弧形导向部和隔板形成容纳一个采样套装的仓体;通过弧形导向部和隔板配合,能够实现一次旋转夹持一个采样套装。
15、进一步地,所述采样回收机构包括设置于机体内侧的内支座,所述内支座顶部固定有前端中空的外框型座,所述外框型座内侧设置有直槽,所述直槽内滑动设置有内框型座;所述内框型座前端开设有第一半圆腔,所述内框型座于第一半圆腔两侧滑动穿过有两根滑柱,所述滑柱前端固定有夹座;所述夹座上开设有与第一半圆腔配合的第二半圆腔;所述滑柱另一端固定有顶板,所述顶板和内框型座之间设置有弹簧体;所述外框型座中空端通过螺栓固定有与顶板活动压合的限位座;所述第一半圆腔和第二半圆腔活动夹持采样管;所述外框型座后端外部固定有第二气缸,所述第二气缸的活塞杆与内框型座固定;所述内支座上下部滑动设置有采样管收集箱。
16、采样管夹持工作时,第二气缸驱动内框型座沿直槽向前滑动,从而使第一半圆腔和第二半圆腔进入到第二槽座,此时,可将完成取样的采样管送入到第一半圆腔和第二半圆腔形成的圆腔内,接着,第二气缸驱动内框型座沿直槽向后滑动,当内框型座持续回退时,当顶板和限位座接触,此时,限位座对顶板进行限位,压缩弹簧体,内框型座和夹座相互分离,此时,夹持在第一半圆腔和第二半圆腔之间的采样管失去夹持力,自动下落进入到采样管收集箱。
17、进一步地,所述采样管收集箱与机体外部滑动嵌合,当完成采样后,机器人行进到样本检区点,通过手动抽出采样管收集箱,从而取出采样管收集箱内侧采集的样品。
18、进一步地,所述滑道和机体之间设置有防护罩,通过防护罩能够保护滑道和机体之间的第一气缸和滑座。
19、一种基于机器人的疾控辅助系统,包括基于机器人的疾控辅助装置,还包括远控终端,所述远控终端与控制器通信连接;通过远控终端可控制机器人往复于各个采集位,同时,可对采集现场进行远程监测。
20、进一步地,所述远控终端为遥控器或定位导航模组;定位导航模组采用激光slam;操作时,可通过遥控器进行远程遥控,配合人脸识别摄像头进行现场监测,使机器人能够行进到各个采集位,还可通过激光slam进行定位导航和行进避障。
21、与现有技术相比,本发明的基于机器人的疾控辅助装置及系统,采用自动定位导航或远程遥控方式,能够驱动机器人往复于各个采集点,并能够对采集者进行面部识别和体温监测,并在取样前后进行自动消毒,避免交叉感染。
- 还没有人留言评论。精彩留言会获得点赞!