一种基于多传感器数据融合的康复机器人控制方法
本发明涉及康复机器人控制方法。具体的说是一种基于多传感器数据融合的康复机器人控制方法。
背景技术:
1、目前康复机器人控制方法虽然在许多方面已经取得了显著进步,但仍存在一些不足和弊端。首先是数据处理和融合方面的局限性。传统的康复机器人通常依赖有限的传感器数据,这可能导致康复过程的信息不全面,无法提供一个完整的康复状态画面。例如,如果一个机器人只使用运动传感器而忽视了力量或压力传感器,它可能无法准确评估患者的力量恢复情况。此外,数据融合技术的不成熟也意味着来自不同传感器的数据可能无法被有效整合,从而影响康复方案的准确性和效果。其次,个性化程度不足是另一个关键问题。许多现有的康复机器人采用标准化的康复方案,这些方案可能无法完全符合每个患者的特定需求。由于每个患者的康复状况、身体条件和康复速度都有所不同,标准化的方案可能无法提供最优的康复效果。这种“一刀切”的方法可能导致康复效率低下,甚至可能对某些患者造成伤害。
2、此外,实时响应和调整能力的不足也是一个显著的问题。传统的康复机器人可能缺乏足够的灵活性来即时响应患者状态的变化。例如,在康复过程中,患者可能会感到疲劳或疼痛,但机器人可能无法即时识别这些信号并相应地调整康复活动。这种缺乏实时反馈和调整能力的问题不仅影响了康复的效果,还可能增加患者受伤的风险。安全性问题也不容忽视。虽然大多数康复机器人都经过精心设计和严格测试,以确保在正常操作条件下的安全性,但在异常情况下,它们可能无法保证患者的完全安全。例如,在机器故障或意外情况下,机器人可能无法正确执行康复动作或及时停止操作,从而可能导致患者受伤。适应性和灵活性的不足也是目前康复机器人面临的挑战。康复过程是动态且多变的,需要根据患者的进展和反应不断调整。然而,许多康复机器人可能缺乏足够的智能化功能来自动学习和适应这些变化。这意味着机器人可能无法针对患者的实时进展提供最合适的康复支持。
3、此外,成本和可访问性也是一个重要问题。高端的康复机器人可能配备了先进的传感器和控制系统,但它们的成本往往较高,这可能限制了它们在临床环境中的普及。此外,对于低收入地区的患者来说,这些高成本的设备可能完全无法触及。
技术实现思路
1、本发明的目的是提供一种基于多传感器数据融合的康复机器人控制方法,从而解决背景技术中所指出的部分弊端和不足。
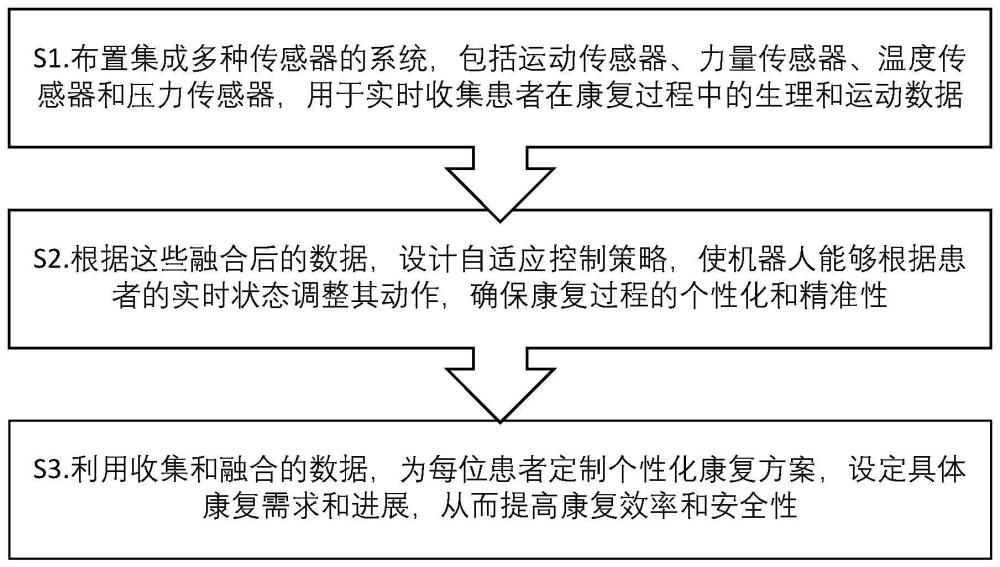
2、本发明解决其上述的技术问题所采用以下的技术方案:包括以下步骤:首先布置集成多种传感器的系统,包括运动传感器、力量传感器、温度传感器和压力传感器,用于实时收集患者在康复过程中的生理和运动数据;接着开发数据融合算法,利用机器学习和人工智能技术,综合解析来自不同传感器的数据,并从中提取关键信息;
3、然后根据这些融合后的数据,设计自适应控制策略,使机器人能够根据患者的实时状态调整其动作,确保康复过程的个性化和精准性;
4、最后利用收集和融合的数据,为每位患者定制个性化康复方案,设定具体康复需求和进展,从而提高康复效率和安全性。
5、进一步地,所述的数据融合算法实现步骤包括:
6、s1、利用深度学习驱动的多模态数据融合来处理和解析不同类型传感器数据,包括图像、声音、运动数据,通过应用卷积神经网络(cnn)或循环神经网络(rnn)提高从复杂和高维度数据中提取特征的能力;
7、s2、结合时间序列分析和预测建模,利用长短时记忆网络(lstm)或门控循环单元(gru)高级循环神经网络,对传感器数据进行时间依赖性分析和康复趋势预测;
8、s3、采用跨模态数据融合技术,处理和整合不同类型传感器数据,提高数据解析的准确性;
9、s4、结合实时异常检测和响应机制,利用机器学习算法进行异常行为的识别和及时调整康复方案。
10、进一步地,所述深度学习驱动的多模态数据融合采用深度学习模型f(x),其中x表示从不同传感器获得的数据;对于图像数据i,使用卷积网络c(i)来提取视觉特征,其中c表示卷积操作的公式:
11、
12、其中wi是权重参数,ii是图像数据的第i个元素,μ和σ分别是局部图像区域的均值和标准差;
13、对于声音和运动数据,使用循环神经网络r进行特征提取;设定递归公式:
14、rt=αrt-1+(1-α)·st
15、其中st表示在时间t的声音或运动数据,α是介于0到1之间的学习率;
16、然后,创建融合函数m来整合由c和r提取的特征,使用公式:
17、m=∫(c(i)·r)dx
18、表示对于所有特征的加权积分;
19、最后为了适应康复任务,定义场景适应函数:
20、
21、其中x代表从融合数据中提取的特征,y代表康复场景的需求,k是调节曲线陡峭程度的参数。
22、进一步地,所述的时间序列分析和预测建模采用设定混合型神经网络模型,其中lstm或gru单元与cnn单元的结合表示为:
23、h(x)=l(x)·c(x)
24、这里l(x)代表lstm或gru单元的输出,c(x)代表cnn单元的输出;l和c的结合通过乘积操作;
25、然后引入自适应时间窗口函数:
26、
27、其中t代表时间点,δt代表时间窗口的长度,μt和σt分别表示时间窗口的中心和宽度,这两个参数根据输入数据动态调整;
28、最后使用态数据增强公式:
29、d(x,λ)=x+λsin(βx)
30、其中x代表原始数据,λ和β是用于控制数据增强程度和频率的参数。
31、进一步地,所述的跨模态数据融合技术采用混合型神经网络n(x),其中x表示来自多种传感器的输入数据;该网络包括针对不同数据类型的子网络,包括ncnn(x)用于处理图像数据,nrnn(x)用于处理时间序列数据;然后采用提取函数其中代表对图像数据应用指数函数增强其特征,而log(nrnn(x))则用于平滑时间序列数据的特征;
32、接着采用融合层g(f),用于整合不同子网络提取的特征;采用新型融合算法:
33、
34、其中f(u)代表从混合型特征提取网络得到的特征集,积分运算用于在不同特征之间建立平滑过渡和相互作用。
35、进一步地,所述的实时异常检测和响应机制,采用引入异常检测函数:
36、
37、其中x={x1,x2,…,xn}表示来自康复机器人传感器的数据流,wi是权重参数,表示对不同传感器数据的重视程度,θ是用于识别异常的阈值,而k是调节曲线陡峭程度的参数;
38、然后再引入调整函数:
39、
40、其中a(x)是异常检测函数的输出,x(t)是时间t的传感器数据,t是考虑的时间窗口长度,而α是衰减因子,用于减少旧数据对当前调整的影响。
41、进一步地,所述的自适应控制策略是利用深度学习模型d(x),其中x表示来自多个传感器的融合数据;模型输出y=d(x)代表对患者未来需求的预测值,由函数公式:
42、
43、给出;这里σ是激活函数,ai和bi是模型参数,xi是输入特征;
44、然后引入自适应控制函数c(y,z),其中y是深度学习模型的输出,z是实时反馈信号,包括生理信号或运动数据;控制调整由函数公式:
45、
46、给出;其中γ是调整因子,表示反馈信号的重要性;根据实时数据和历史预测调整机器人的动作,以响应患者的即时需求和长期康复目标。
47、进一步地,所述的定制个性化康复方案采用以下的步骤:
48、s1、采用机器学习模型m(x),其中x表示来自多传感器的数据;模型的输出y=m(x)用于指示康复方案,由函数公式:
49、
50、给出,其中tanh是双曲正切激活函数,ai和bi是模型参数,xi是输入特征;所述的机器学习模型从复杂数据中提取关键特征,用于制定针对患者特定需求的康复方案;
51、s2、使用优化算法p(y)来生成个性化康复路径,其中y是机器学习模型的输出;路径规划由公式:
52、
53、给出,其中θ表示康复活动的参数集,g是代价函数,t是规划的时间范围;通过所述的优化算法找到适合个体康复目标和约束的路径;
54、s3、集成风险评估函数:
55、r(x,θ)=∫|f(x(t),θ)h(t)|dt
56、其中f表示基于模型参数θ的预测康复状态,h(t)是安全阈值函数,t是时间变量。
57、本发明具有以下有益效果:
58、1.提高康复精度:通过整合来自多种传感器的数据,如运动、力量、温度和压力传感器,该方法能够为患者提供一个更全面和详细的康复状态分析。这种深度的数据融合使得康复机器人能够更准确地评估患者的康复进展和需求,从而提供更精确的康复指导。
59、2.个性化康复方案:机器学习模型能够从复杂的数据中提取关键特征,用于制定针对患者特定需求的康复方案。这种个性化方法确保了康复方案不仅符合患者的物理恢复需求,还考虑到他们的个人偏好和舒适度,从而提升康复效果。
60、3.实时响应与调整:通过实时异常检测和响应机制,康复机器人能够即时识别患者在康复过程中的任何异常行为或模式,并迅速做出调整。这种及时的反应能够有效减少患者受伤的风险,同时确保康复方案的连续性和适应性。
61、4.安全性提升:集成的风险评估函数能够在患者进行康复活动时持续评估风险,确保所有康复活动都在安全的范围内进行。这样可以有效地预防因康复活动不当导致的二次伤害,增加康复过程的整体安全性。
- 还没有人留言评论。精彩留言会获得点赞!