一种基于杆件机构的仿生儿童电动马车
1.本实用新型属于儿童玩具领域,涉及一种基于杆件机构的仿生儿童电动马车,以马的走动带动座车向前运动的电动玩具,以提供模仿真实的马的另种奇趣构造。
背景技术:
2.一般的儿童电动车均以具体的汽车造型或稍加造型变化的卡通趣味造型为主,且其构造均为车身结合动力源。实用新型者也仅改动动力构造、或是局部加以改良而已。但在此类产品行销已久的现今市场下,其对消费者的吸引力已大为降低,目前的竞争仅只在价格而已。此类车型的儿童电动车的产品寿命已至衰退期,且极需突破。
3.本实用新型的目的在于使马真正的“走”起来,而不是仅仅靠轮子滚动而运动。增加了此类儿童玩具的趣味性。让大家对此类玩具的印象得到改观。
技术实现要素:
4.本实用新型为了克服现有的玩具马车中的“马”无法走动、趣味性和可玩性差的问题,提供了一种基于杆件机构的仿生儿童电动马车。
5.为解决上述技术问题,本实用新型是采用如下技术方案实现的:
6.一种基于杆件机构的仿生儿童电动马车,包括带有四个马腿的马体、设置在马体中用于驱动四个马腿运动的行走装置以及带有四个车轮并与马体铰接的座车,马体中部设置有空腔,行走装置包括一个矩形板状的底座,底座固定设置在马体的空腔中,底座的上表面设置有矩形凹槽,矩形凹槽中对称设置有两个电动马达,即第一电动马达和第二电动马达,两个电动马达均与一个设置在矩形凹槽中的电池盒连接,第一电动马达的输出轴由底座的左侧表面伸出后与一个杆状的第一曲柄的上端通过平键固定连接,一个杆状的第三曲柄位于第一曲柄的后方并且第三曲柄的上端与底座的左侧表面铰接,一个杆状的第一连杆的后端、一个杆状的第一曲柄连杆的前端以及第一曲柄的下端铰接在一起,一个杆状的第三连杆的后端、第一曲柄连杆的后端以及第三曲柄的下端铰接在一起,第一连杆的中部与一个杆状的第一摇杆的上端铰接,第一摇杆的下端铰接在底座的左侧表面上并位于第一曲柄的前方,第三连杆的中部与一个杆状的第三摇杆的上端铰接,第三摇杆的下端铰接在底座的左侧表面上并位于第三曲柄的后方;
7.第二电动马达的输出轴由底座的右侧表面伸出后与一个杆状的第二曲柄的下端通过平键固定连接,一个杆状的第四曲柄与第二曲柄间隔对称设置并且第四曲柄的下端与底座的右侧表面铰接,一个杆状的第二连杆的后端、一个杆状的第二曲柄连杆的前端以及第二曲柄的上端铰接在一起,一个杆状的第四连杆的后端、第二曲柄连杆的后端以及第四曲柄的上端铰接在一起,第二连杆的中部与一个杆状的第二摇杆的上端铰接,第二摇杆的下端铰接在底座的右侧表面上并位于第一曲柄的前方,第四连杆的中部与一个杆状的第四摇杆的上端铰接,第四摇杆的下端铰接在底座的右侧表面上并位于第四曲柄的后方;
8.第一连杆的前端与位于马体左前方的马腿铰接,第二连杆与位于马体右前方的马
腿铰接,第三连杆与位于马体左后方的马腿铰接,第四连杆与位于马体右后方的马腿铰接,马体左前方的马腿与马体右后方的马腿固定连接,马体右前方的马腿与马体左后方的马腿固定连接;
9.四个曲柄即第一曲柄、第二曲柄、第三曲柄和第四曲柄的结构和尺寸相同,两个曲柄连杆即第一曲柄连杆和第二曲柄连杆的结构和尺寸相同,四个连杆即第一连杆、第二连杆、第三连杆和第四连杆的结构和尺寸相同,四个摇杆即第一摇杆、第二摇杆、第三摇杆和第四摇杆的结构和尺寸相同。
10.进一步的技术方案包括:
11.第一连杆的前端与一个杆状的竖直设置的左前腿连接杆的上端铰接,左前腿连接杆的下端与位于马体左前方的马腿固定连接,第二连杆的前端与一个杆状的竖直设置的右前腿连接杆的上端铰接,右前腿连接杆的下端与位于马体右前方的马腿固定连接,第三连杆的前端与一个杆状的竖直设置的左后腿连接杆的上端铰接,左后腿连接杆的下端与位于马体左后方的马腿固定连接,第四连杆的前端与一个杆状的竖直设置的右后腿连接杆的上端铰接,右前后连接杆的下端与位于马体右后方的马腿固定连接,左前腿连接杆的上端和右后腿连接杆的上端通过一个横向截面为z字形的第一马腿连接板固定连接,右前腿连接杆的中部和左后腿连接杆的中部通过一个横向截面为z字形的第二马腿连接板固定连接,第一马腿连接板和第二马腿连接板的形状和尺寸相同。
12.相邻的曲柄和摇杆在底座上的铰接点之间的距离均为a,相邻的曲柄和摇杆在对应的连杆上的铰接点之间的距离均为b,每个曲柄上的两个铰接点之间的距离均为c,每个摇杆上的两个铰接点之间的距离均为d;a:b:c:d为0.785:1:0.355:1。
13.座车前部的两个车轮通过一个轮轴连接,轮轴与一个l字形的第一马车连杆的一端铰接,第一马车连杆的另一端与马体的左后部铰接,轮轴与一个l字形的第二马车连杆的一端铰接,第二马车连杆的另一端与马体的右后部铰接,第一马车连杆和第二马车连杆的结构和尺寸相同。
14.矩形凹槽通过一个矩形挡板遮盖,矩形挡板用螺钉固定在底座的上表面上。
15.马体的空腔中有竖直向下设置的底座支柱,底座支柱的下端与底座的上表面固定连接。
16.座车为中空的椭球形,座车的左右两侧各开有一个用于进出座车的开口,座车上开有多个观察窗。
17.与现有技术相比本实用新型的有益效果是:
18.本实用新型提供一种基于杆件机构的仿生儿童电动马车在工作过程中,动力装置即两个电动马达分别带动第一曲柄与第二曲柄转动。第一曲柄连杆保证了第一曲柄、第三曲柄运动的一致进而保证行进装置左侧前后两个曲柄摇杆机构运动的一致。第二曲柄连杆保证了第二曲柄、第四曲柄运动的一致进而保证行进装置右侧前后两个曲柄摇杆机构运动的一致。通过四杆机构的运动,第一连杆和第四连杆带动第一马腿连接板抬起,第二连杆和第三连杆带动第二马腿连接板抬起进而完成走动。不同侧的前后马腿相连使运动更加平稳且模仿了典型四足动物的走动。第一曲柄与第二曲柄成180
°
角,故第三曲柄与第四曲柄也成180
°
角。这样保证了行进装置左侧的两个杆件机构与行进装置右侧的两个杆件机构运动的相反。保证两个马腿连接板依次抬起,这样便可完成行走。行走装置的运动带动了固定联
接的马体的向前运动,而马体通过铰接第一马车连杆与第二马车连杆带动与马车连杆铰接的座车向前运动。本实用新型结构简单,具有趣味性。是作为玩具的一个很好的方案。
19.本实用新型的目的在于使马真正的“走”起来,而不是仅仅靠轮子滚动而运动。增加了此类儿童玩具的趣味性。让大家对此类玩具的印象得到改观。
附图说明
20.下面结合附图对本实用新型作进一步的说明:
21.图1是本实用新型所述的一种基于杆件机构的仿生儿童电动马车的外部构造示意图。
22.图2是图1的轴测图。
23.图3是本实用新型所述的一种基于杆件机构的仿生儿童电动马车的马体与行走装置的剖视图。
24.图4是本实用新型所述的一种基于杆件机构的仿生儿童电动马车的行走装置左侧的侧视图。
25.图5是本实用新型所述的一种基于杆件机构的仿生儿童电动马车的行走装置右侧的侧视图。
26.图6是本实用新型所述的一种基于杆件机构的仿生儿童电动马车的行走装置的底板的结构示意图。
27.图7是本实用新型所述的一种基于杆件机构的仿生儿童电动马车的行走装置的底板中安装有动力源的结构示意图。
28.图8是本实用新型所述的一种基于杆件机构的仿生儿童电动马车的行走装置中的左侧的各个杆件的连接关系示意图。
29.图9是本实用新型所述的一种基于杆件机构的仿生儿童电动马车的行走装置中的右侧的各个杆件的连接关系示意图。
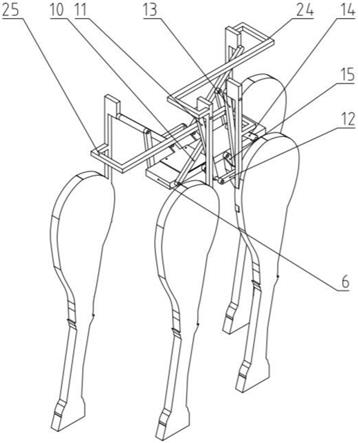
30.图10是本实用新型所述的一种基于杆件机构的仿生儿童电动马车的行走装置中的第一马腿连接板将左前方的马腿和右后方的马腿连接在一起的结构示意图。
31.图11是本实用新型所述的基于四杆机构的仿生儿童电动马车的行走装置中的第二马腿连接板将右前方的马腿和左后方的马腿连接在一起的结构示意图。
32.图中:1.马体,2.第二马体连杆,3.座车,4.第一马体连杆5.行走装置,6.底座,7.挡板,8.第一电动马达,9.第二电动马达,10.第一摇杆,11.第一连杆,12.第一曲柄连杆,13.第三连杆,14.第三摇杆,15.第三曲柄,16.第一曲柄,17.第四摇杆,18.第四连杆,19.第二曲柄连杆,20.第二连杆,21.第二摇杆,22.第二曲柄,23.第四曲柄,24.第一马腿连接板,25.第二马腿连接板,26.连接支座,27.电池盒。
具体实施方式
33.下面结合附图对本实用新型作详细的描述:
34.本实用新型提供了一种基于杆件机构的仿生儿童电动马车,如图2所示,包括带有四个马腿的马体1、设置在马体1中用于驱动四个马腿运动的行走装置5以及带有四个车轮并与马体1铰接的座车3。座车3前部的两个车轮通过一个轮轴连接,轮轴与一个l字形的第
一马车连杆4的一端铰接,第一马车连杆4的另一端与马体1的左后部铰接,轮轴与一个l字形的第二马车连杆2的一端铰接,第二马车连杆2的另一端与马体1的右后部铰接,第一马车连杆4和第二马车连杆2的结构和尺寸相同。座车3为中空的椭球形,座车3的左右两侧各开有一个用于进出座车3的开口,座车3的左右两侧各开有两个观察窗。
35.如图3至图11所示,马体1中部设置有空腔,行走装置5包括一个矩形板状的底座6,底座6固定设置在马体1的空腔中,马体1的空腔中有竖直向下设置的底座支柱26,底座支柱26的下端与底座6的上表面固定连接。底座6的上表面设置有矩形凹槽,矩形凹槽中对称设置有两个电动马达,即第一电动马达8和第二电动马达9,两个电动马达均与一个设置在矩形凹槽中的电池盒27连接,矩形凹槽通过一个矩形挡板7遮盖,矩形挡板7用螺钉固定在底座6的上表面上。
36.第一电动马达8的输出轴由底座6的左侧表面伸出后与一个杆状的第一曲柄16的上端通过平键固定连接,一个杆状的第三曲柄15位于第一曲柄16的后方并且第三曲柄15的上端与底座6的左侧表面铰接,一个杆状的第一连杆11的后端、一个杆状的第一曲柄连杆12的前端以及第一曲柄16的下端铰接在一起,一个杆状的第三连杆13的后端、第一曲柄连杆12的后端以及第三曲柄15的下端铰接在一起,第一连杆11的中部与一个杆状的第一摇杆10的上端铰接,第一摇杆10的下端铰接在底座6的左侧表面上并位于第一曲柄16的前方,第三连杆13的中部与一个杆状的第三摇杆14的上端铰接,第三摇杆14的下端铰接在底座6的左侧表面上并位于第三曲柄15的后方;
37.第二电动马达9的输出轴由底座6的右侧表面伸出后与一个杆状的第二曲柄22的下端通过平键固定连接,一个杆状的第四曲柄23与第二曲柄22间隔对称设置并且第四曲柄23的下端与底座6的右侧表面铰接,一个杆状的第二连杆20的后端、一个杆状的第二曲柄连杆19的前端以及第二曲柄22的上端铰接在一起,一个杆状的第四连杆18的后端、第二曲柄连杆19的后端以及第四曲柄23的上端铰接在一起,第二连杆20的中部与一个杆状的第二摇杆21的上端铰接,第二摇杆21的下端铰接在底座6的右侧表面上并位于第一曲柄16的前方,第四连杆18的中部与一个杆状的第四摇杆17的上端铰接,第四摇杆17的下端铰接在底座6的右侧表面上并位于第四曲柄23的后方;
38.第一连杆11的前端与一个杆状的竖直设置的左前腿连接杆的上端铰接,左前腿连接杆的下端与位于马体1左前方的马腿固定连接,第二连杆20的前端与一个杆状的竖直设置的右前腿连接杆的上端铰接,右前腿连接杆的下端与位于马体1右前方的马腿固定连接,第三连杆13的前端与一个杆状的竖直设置的左后腿连接杆的上端铰接,左后腿连接杆的下端与位于马体1左后方的马腿固定连接,第四连杆18的前端与一个杆状的竖直设置的右后腿连接杆的上端铰接,右前后连接杆的下端与位于马体1右后方的马腿固定连接,左前腿连接杆的上端和右后腿连接杆的上端通过一个横向截面为z字形的第一马腿连接板24固定连接,右前腿连接杆的中部和左后腿连接杆的中部通过一个横向截面为z字形的第二马腿连接板25固定连接,第一马腿连接板24和第二马腿连接板25的形状和尺寸相同。
39.四个曲柄即第一曲柄16、第二曲柄22、第三曲柄15和第四曲柄23的结构和尺寸相同,两个曲柄连杆即第一曲柄连杆12和第二曲柄连杆19的结构和尺寸相同,四个连杆即第一连杆11、第二连杆20、第三连杆13和第四连杆18的结构和尺寸相同,四个摇杆即第一摇杆10、第二摇杆21、第三摇杆14和第四摇杆17的结构和尺寸相同。
40.相邻的曲柄和摇杆在底座上的铰接点之间的距离均为a,相邻的曲柄和摇杆在对应的连杆上的铰接点之间的距离均为b,每个曲柄上的两个铰接点之间的距离均为c,每个摇杆上的两个铰接点之间的距离均为d。a:b:c:d为0.785:1:0.355:1。
41.本实用新型提供的一种基于杆件机构的仿生儿童电动马车的工作原理如下:
42.工作时,动力装置即第一电动马达带8动第一曲柄16转动、第二电动马达9带动第二曲柄22转动。第一曲柄连杆12保证了第一曲柄16和第三曲柄15运动的一致进而保证行进装置左侧前后两个曲柄摇杆机构运动的一致。第二曲柄连杆19保证了第二曲柄22和第四曲柄23运动的一致进而保证行走装置右侧前后两个曲柄摇杆机构运动的一致。通过四杆机构的运动,第一连杆11带动左前方的马腿运动,左前方的马腿通过第一马腿连接板24带动第四连杆18进而带动右后方的马腿运动,第二连杆20带动右前方的马腿运动,右前方的马腿通过第二马腿连接板25带动第三连杆13进而带动左后方的马腿运动,进而完成走动。不同侧的前后马腿相连使运动更加平稳且模仿了典型四足动物的走动。第一曲柄16与第二曲柄22始终成180
°
角,故第三曲柄15与第四曲柄23也始终成180
°
角。这样保证了行进装置左侧的两个四杆机构与行进装置右侧的两个四杆机构运动的相反。保证前后马腿的运动具有时序,这样便可完成行走。行走装置的向前运动带动了固定联接的马体1的向前运动,而马体1通过与座车3前部的轮轴铰接的第一马体连杆4与第二马体连杆2带动与座车3向前运动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1