一种基于恒转矩柔性铰链的手指手腕康复机构
1.本发明涉及柔性康复机构技术领域,特别是指一种基于恒转矩柔性铰链的手指手腕康复机构。
背景技术:
2.柔性铰链是一种结构简单、形状规则的弹性支承,具有基本固定的回转中心,依靠弹性薄片的有限变形进行工作,在一定的扭转载荷下,能够绕其回转中心在一定角度范围内产生回转运动。普通柔性铰链在发生相对转动时,会产生恢复力矩,并且需要施加驱动力来平衡铰链的恢复力矩,容易使结构的复杂度提高。现有技术中公开了通过负刚度模块来实现零刚度柔性铰链的输出,很好的解决了恢复力矩的问题,但未涉及恒转矩输出的问题。
3.在一定范围内,恒力机构输出端产生的反力可以维持在某一定值附近波动。恒转矩柔性铰链就属于恒力机构的一种。目前获得恒力特性的方法主要有:机电一体化和弹簧等柔性元件的结构设计等方法。机电一体化技术主要通过反馈控制实现力的输出控制,但系统复杂、成本高。现有技术中公开了一种柔顺恒力矩联轴器和基于柔顺恒力矩机构的关节支撑装置,利用支架等柔性片段的变形产生恒力矩,而本发明采用圆弧形柔性片段的变形来实现恒力矩输出,在结构方面是截然不同的,是两种不同的技术方案。
4.在康复机构领域,现有技术公开了一种多自由度的手腕康复机构,该技术方案可以提供患者手腕内外翻、上下翻转和旋转等运动模式。但是,该技术采用点机配合减速器的方式带动手腕各关节的方式进行康复,使得整体结构复杂,生产成本高。
5.所以,本发明将提供一种基于恒转矩柔性铰链的手指手腕康复机构,该手指手腕康复机构所涉及的恒转矩铰链具有零件少、结构简单和无摩擦的特点,这使得所发明的手指手腕康复机构拥有较小的体积,容易穿戴。
技术实现要素:
6.本发明为解决现有技术存在的结构复杂、生产成本高等问题,提供一种基于恒转矩柔性铰链的手指手腕康复机构,主要应用于康复医疗领域的机械产品中,比如手指屈肌肌腱、韧带和手腕的康复治疗。且该手指手腕康复机构体积小、可穿戴,所涉及的恒转矩柔性铰链具有零件少、无摩擦的特点,降低了生产和维修成本。
7.该机构包括恒转矩柔性铰链、手指抓握模块和手腕穿戴模块,恒转矩柔性铰链包括外环结构和内三角结构,手指抓握模块安装在恒转矩柔性铰链的外环结构外侧,手腕穿戴模块安装在恒转矩柔性铰链的内三角结构两侧。
8.其中,恒转矩柔性铰链由至少三个柔性件圆周阵列层叠在一起,柔性件包括外环法兰、内三角法兰和圆弧形柔性片段,外环法兰层叠构成外环结构,内三角法兰层叠构成内三角结构;内三角法兰和圆弧形柔性片段置于外环法兰的圆圈内,圆弧形柔性片段呈圆弧形,圆弧形柔性片段的一端连接到外环法兰的内侧壁,另一端通过内三角法兰的缺口连接到内三角法兰的内侧壁,外环法兰和内三角法兰通过圆弧形柔性片段连接。
9.手指抓握模块包括抓握件和固定板,抓握件包括抓握板、凸轨和安装孔,固定板通过螺栓穿过固定板上的固定板圆柱孔安装在抓握件一端两侧的安装孔中,抓握件另一端为抓握板,抓握件与固定板配合处内侧设置凸轨,固定板形状为弧形,能够与恒转矩柔性铰链的外环法兰外侧配合。
10.手腕穿戴模块包括第一护腕和第二护腕,第一护腕和第二护腕分别安装在恒转矩柔性铰链的内三角结构两侧;
11.第一护腕和第二护腕结构镜像对称设置,第一护腕和第二护腕上部设置通孔,与恒转矩柔性铰链的内三角法兰螺栓连接,第一护腕和第二护腕下部的护板相对设置。患者可以通过手腕穿戴模将手指手腕康复机构穿戴在手腕上。
12.外环法兰设有至少两个凹槽,内三角法兰设有至少两个安装圆柱孔,圆弧形柔性片段的两端设有圆角,分别与外环法兰内侧壁和内三角法兰内侧壁通过圆角固接;
13.柔性件依次层叠在一起,层叠后多个圆弧形柔性片段圆周均匀分布。
14.圆弧形柔性片段的半径为r,圆心角为θ,圆弧形柔性片段两端圆角的半径相同且为r,圆弧形柔性片段和圆角的厚度相同且为t;且r《0.1r。
15.固定板和抓握件的凸轨将层叠后所有的外环法兰固定在一起。
16.手腕穿戴模块将层叠后所有的内三角法兰固定在一起。
17.该机构中,恒转矩柔性铰链的外环结构和手指抓握模块形成一个整体,恒转矩柔性铰链的内三角结构和手腕穿戴模块形成另一个整体,两者通过圆弧形柔性片段可以发生相对转动。
18.本发明的上述技术方案的有益效果如下:
19.1.本发明通过圆弧形柔性片段来实现恒转矩柔性铰链的恒力矩输出,普通柔性铰链在转动时,力矩和转角是线性关系的,对于手指的肌腱和韧带康复治疗过程中,恒力矩输出更容易使患者实现手腕、手指的弯曲。
20.2.本发明中恒转矩柔性铰链的柔性变形区域为圆弧形柔性片段,结构简单,并且在现有技术中并没有应用此结构的手指手腕康复机构。
21.3.本发明的恒转矩柔性铰链由至少三个柔性件组成,可以根据实际需求增减柔性件的数量,以满足患者对不同恒力矩输出的需求。
22.4.本发明的手指手腕康复机构具有无摩擦,无需润滑的优势,降低了手指手腕康复机构的制造和维护成本,其简单的结构使得穿戴很方便,采用柔性机构也提高了穿戴的安全性。
附图说明
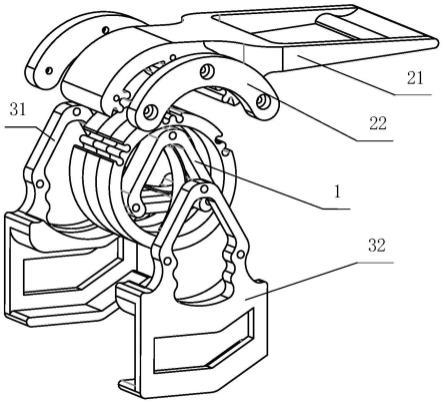
23.图1为本发明的基于恒转矩柔性铰链的手指手腕康复机构爆炸示意图;
24.图2为本发明的基于恒转矩柔性铰链的手指手腕康复机构结构示意图;
25.图3为本发明的恒转矩柔性铰链结构示意图;
26.图4为本发明柔性件的俯视图;
27.图5为本发明圆弧形柔性片段的主要结构参数说明图;
28.图6为本发明抓握件的结构示意图;
29.图7为本发明固定板的结构示意图;
30.图8为本发明第一护腕的结构示意图。
31.其中:
32.1-恒转矩柔性铰链,11-柔性件,111-外环法兰,1111-凹槽,112-内三角法兰,1121-安装圆柱孔,113-圆弧形柔性片段;
33.2-手指抓握模块,21-抓握件,211-抓握板,212-凸轨,213-安装孔,22-固定板,221-固定板圆柱孔;
34.3-手腕穿戴模块,31-第一护腕,311-通孔,312-护板,32-第二护腕。
具体实施方式
35.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
36.本发明提供一种基于恒转矩柔性铰链的手指手腕康复机构。
37.如图1、图2所示,该机构包括恒转矩柔性铰链1、手指抓握模块2和手腕穿戴模块3,恒转矩柔性铰链1包括外环结构和内三角结构,手指抓握模块2安装在恒转矩柔性铰链1的外环结构外侧,手腕穿戴模块3安装在恒转矩柔性铰链1的内三角结构两侧。
38.如图3、图4所示,恒转矩柔性铰链1由至少三个柔性件11圆周阵列层叠在一起,柔性件11包括外环法兰111、内三角法兰112和圆弧形柔性片段113,外环法兰111层叠构成外环结构,内三角法兰112层叠构成内三角结构;内三角法兰112和圆弧形柔性片段113置于外环法兰111的圆圈内,圆弧形柔性片段113呈圆弧形,圆弧形柔性片段113的一端连接到外环法兰111的内侧壁,另一端通过内三角法兰112的缺口连接到内三角法兰112的内侧壁。
39.如图6、图7所示,手指抓握模块2包括抓握件21和固定板22,抓握件21包括抓握板211、凸轨212和安装孔213,固定板22通过螺栓穿过固定板22上的固定板圆柱孔221安装在抓握件21一端两侧的安装孔213中,抓握件21另一端为抓握板211,抓握件21与固定板22配合处内侧设置凸轨212,固定板22形状为弧形,能够与恒转矩柔性铰链1的外环法兰111外侧配合。
40.如图8所示,手腕穿戴模块3包括第一护腕31和第二护腕32,第一护腕31和第二护腕32分别安装在恒转矩柔性铰链1的内三角结构两侧;
41.第一护腕31和第二护腕32结构镜像对称设置,第一护腕31和第二护腕32上部设置通孔,与恒转矩柔性铰链1的内三角法兰螺栓连接,第一护腕31和第二护腕32下部的护板相对设置。
42.外环法兰111设有至少两个凹槽1111,内三角法兰112设有至少两个安装圆柱孔1121,圆弧形柔性片段113的两端设有圆角,分别与外环法兰111内侧壁和内三角法兰112内侧壁通过圆角固接;柔性件11依次层叠在一起,层叠后多个圆弧形柔性片段113圆周均匀分布。
43.本发明机构中,固定板22和抓握件21的凸轨212将层叠后所有的外环法兰111固定在一起。手腕穿戴模块3将层叠后所有的内三角法兰112固定在一起,
44.具体设计中,抓握件21的凸轨212和外环法兰111的凹槽1111可以相互配合,固定板22通过螺栓安装在抓握件21两侧;手腕穿戴模块3通过销轴和螺栓将所有的内三角法兰112固定在一起;恒转矩柔性铰链1的外环结构和手指抓握模块2形成一个整体,恒转矩柔性
铰链1的内三角结构和手腕穿戴模块3形成另一个整体,两者通过所述的圆弧形柔性片段113可以发生相对转动。
45.如图5所示,圆弧形柔性片段的半径为r,圆心角为θ,圆弧形柔性片段113两端圆角的半径相同且为r,圆弧形柔性片段113和圆角的厚度相同且为t;且r《0.1r。
46.具体设计时,选取尺寸:r=39mm、θ=75
°
、r=3mm、t=1mm,可使恒转矩柔性铰链1获得恒转矩输出效果。
47.在具体应用中,患者可以通过手腕穿戴模块3将手指手腕康复机构穿戴在手腕上,即将手腕置于两个护腕之间,通过调整柔性件11的数量来调整恒转矩柔性铰链1的力矩输出,用手指抓握手指抓握模块2中的抓握板211,进行手指屈肌肌腱、韧带和手腕的康复治疗。
48.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1