基于感知的行人行为预测方法、装置及电子设备与流程
本公开涉及虚拟游戏,尤其涉及一种基于感知的行人行为预测方法、装置及电子设备。
背景技术:
1、在游戏技术领域中,需要对游戏场景中的例如npc,虚拟行人进行建模,涉及到基于最新的每个行人的位置,更新描述总人群的数据结构,从而预测虚拟行人的行为,现有技术中存在对虚拟人智能个体的假设过于简化,虚拟人行为过于机械和简单;虚拟行人个体缺乏自我的认知和决策,仅仅服从于全局算法的调度,无法实现更为复杂和真实的个体智能的技术问题。
技术实现思路
1、本发明的目的是提供一种基于感知的行人行为预测方法、装置及电子设备,旨在解决相关场景中对虚拟人智能个体的假设过于简化,虚拟人行为过于机械和简单;虚拟行人个体缺乏自我的认知和决策,仅仅服从于全局算法的调度,无法实现更为复杂和真实的个体智能的技术问题。
2、为了实现上述目的,本公开实施例的第一方面,提供一种基于感知的行人行为预测方法,所述方法包括:
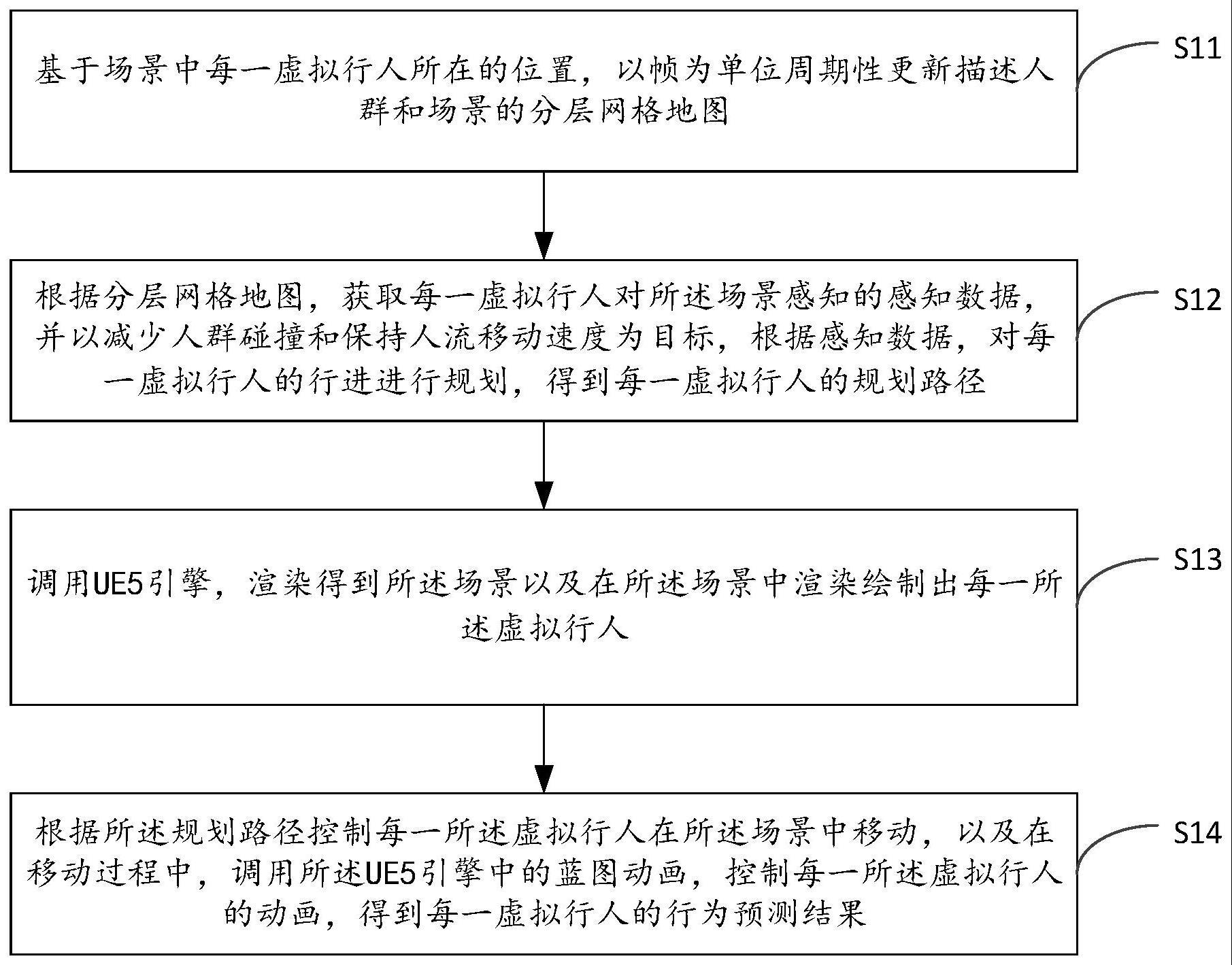
3、基于场景中每一虚拟行人所在的位置,以帧为单位周期性更新描述人群和场景的分层网格地图;
4、根据所述分层网格地图,获取每一所述虚拟行人对所述场景感知的感知数据,并以减少人群碰撞和保持人流移动速度为目标,根据所述感知数据,对每一虚拟行人的行进进行规划,得到每一所述虚拟行人的规划路径;
5、调用ue5引擎,渲染得到所述场景以及在所述场景中渲染绘制出每一所述虚拟行人;
6、根据所述规划路径控制每一所述虚拟行人在所述场景中移动,以及在移动过程中,调用所述ue5引擎中的蓝图动画,控制每一所述虚拟行人的动画,得到每一虚拟行人的行为预测结果。
7、在其中一种可能实现的方式中,所述基于场景中每一虚拟行人所在的位置,以帧为单位周期性更新描述人群和场景的分层网格地图,包括:
8、基于场景中每一虚拟行人所在的位置,以帧为单位周期性构建描述所述场景中静态对象的对象二维网格地图;
9、构建用于路径规划的四叉树网格地图;
10、根据所述对象二维网格地图,构建用于查询临近行人的行人二维网格地图;
11、针对所述场景中的静态对象添加属性描述,并根据所述属性描述、对象二维网格地图、所述四叉树网格地图以及所述行人二维网格地图,更新得到描述人群和场景的分层网格地图,其中,所述属性描述包括位置、尺寸、形状、材质、交互属性和颜色中的至少一者。
12、在其中一种可能实现的方式中,所述基于场景中每一虚拟行人所在的位置,以帧为单位周期性构建描述所述场景中静态对象的对象二维网格地图,包括:
13、以帧为单位周期性将所述场景中的城市3维模型映射到2维水平面上;
14、在所述2维水平面上覆盖均匀划分的二维网格,生成二维网格地图,其中,所述二维网格中每个网格单元对应于一个子区域;
15、在所述二维网格中存储占据该子区域的静态对象的标识符;
16、以所述场景中每一虚拟行人所在的位置,确定每一所述虚拟行人在朝向感知范围内针对所述静态对象的描述,并将所述描述存储到对应的子区域,得到所述二维网格地图。
17、在其中一种可能实现的方式中,所述构建用于路径规划的四叉树网格地图,包括:
18、以帧为单位周期性根据所述场景中城市3维模型,划分网格空间区域,其中,四叉树的每个节点代表一个空间区域,当一个空间区域内存在静态对象时,对应的所述四叉树的节点继续划分为多个子节点;
19、确定并保存占据每一所述网格空间区域的静态对象的信息,以及所述网格空间区域的可达性和同行性,生成用于路径规划的四叉树网格地图。
20、在其中一种可能实现的方式中,所述根据所述对象二维网格地图,构建用于查询临近行人的行人二维网格地图,包括:
21、在所述场景的二维水平面上覆盖一个均匀分布的单元网格,每个所述单元网格存储有在其内的虚拟行人的行人信息;
22、在每一所述虚拟行人在移动时,以帧为单位周期性,根据所述对象二维网格地图中的静态对象,将所述虚拟行人的位置记录到相应的单元网格单元中,构建生成用于查询临近行人的行人二维网格地图。
23、在其中一种可能实现的方式中,所述根据所述分层网格地图,获取每一所述虚拟行人对所述场景感知的感知数据,包括:
24、根据所述分层网格地图,查询并确定每一所述虚拟行人从当前位置到查询位置之间是否存在障碍对象;
25、将所述虚拟行人朝向的预设半径内扇形范围,确定为感知范围;
26、根据是否存在所述障碍对象,在所述感知范围内确定每一所述虚拟行人对所述场景感知的感知数据。
27、在其中一种可能实现的方式中,所述根据所述分层网格地图,查询并确定每一所述虚拟行人从当前位置到查询位置之间是否存在障碍对象,包括:
28、在每一所述虚拟行人在移动时,基于所述虚拟行人的当前位置向查询位置生成检测射线;
29、将所述检测射线光栅化至所述对象二维网格地图中;
30、对于所述二维网格地图中每个存在所述检测射线的目标二维网格,查询所述目标二维网格对应的子区域中是否存在障碍对象;
31、根据各所述目标二维网格对应的子区域中是否存在障碍对象的结果,确定每一所述虚拟行人从当前位置到查询位置之间是否存在障碍对象。
32、在其中一种可能实现的方式中,所述感知数据包括地面高度、感知范围内的虚拟行人、静态对象的边界、可交互的静态对象中的至少一者,其中,所述感知范围内的虚拟行人是数量小于等于预设数量的临近行人。
33、本公开实施例的第二方面,提供一种基于感知的行人行为预测装置,所述装置包括:
34、更新模块,被配置为基于场景中每一虚拟行人所在的位置,以帧为单位周期性更新描述人群和场景的分层网格地图;
35、路径规划模块,被配置为根据所述分层网格地图,获取每一所述虚拟行人对所述场景感知的感知数据,并以减少人群碰撞和保持人流移动速度为目标,根据所述感知数据,对每一虚拟行人的行进进行规划,得到每一所述虚拟行人的规划路径;
36、渲染模块,被配置为调用ue5引擎,渲染得到所述场景以及在所述场景中渲染绘制出每一所述虚拟行人;
37、行为预测模块,被配置为根据所述规划路径控制每一所述虚拟行人在所述场景中移动,以及在移动过程中,调用所述ue5引擎中的蓝图动画,控制每一所述虚拟行人的动画,得到每一虚拟行人的行为预测结果。
38、本公开实施例的第三方面,提供一种电子设备,包括:
39、处理器;
40、用于存储处理器可执行指令的存储器;
41、其中,所述处理器被配置为执行所述存储器中存储的可执行指令,以执行第一方面中任一项所述的方法。
42、本发明提供了一种基于感知的行人行为预测方法、装置及电子设备。与现有技术相比具备以下有益效果:
43、基于场景中每一虚拟行人所在的位置,以帧为单位周期性更新描述人群和场景的分层网格地图;根据所述分层网格地图,获取每一所述虚拟行人对所述场景感知的感知数据,并以减少人群碰撞和保持人流移动速度为目标,根据所述感知数据,对每一虚拟行人的行进进行规划,得到每一所述虚拟行人的规划路径;调用ue5引擎,渲染得到所述场景以及在所述场景中渲染绘制出每一所述虚拟行人;根据所述规划路径控制每一所述虚拟行人在所述场景中移动,以及在移动过程中,调用所述ue5引擎中的蓝图动画,控制每一所述虚拟行人的动画,得到每一虚拟行人的行为预测结果。可以对虚拟人智能个体的行为进行准确预测,从而丰富游戏场景;并且,虚拟行人个体可以基于认知进行决策,构建相对复杂的游戏场景,提高用户体验感。
44、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!