适用于大型吊装机械楼面作业的组合式平台和作业方法与流程
1.本发明涉及楼面吊装作业的承重结构技术领域,特别涉及一种适用于大型吊装机械楼面作业的组合式平台和作业方法。
背景技术:
2.在建筑与机电安装施工项目中,往往有一些体积与重量较大的物品需要进行楼面吊装,如空调、电机、配电柜等设备,一般楼面吊装多使用履带式吊装机械在楼面进行吊装作业。
3.由于吊装机械和被吊物品的重量大,楼面吊装作业需要作业面具备较大的承重能力,但是,一般的楼面设计的承重有限,不能承受吊装机械的重量,更不能承受吊装机械和被吊物品两者共同的重量,如果直接进行楼面吊装作业,可能会损坏楼面,导致楼面开裂甚至坍塌,引发安全事故。
技术实现要素:
4.为了解决上述技术问题,本发明提供了一种适用于大型吊装机械楼面作业的组合式平台,包括“鱼腹”式平台板、多个垫板和多个“品”字梁;所述垫板设置在结构柱或者结构梁位置的楼面上;所述“品”字梁的两端架设在垫板上,且多个“品”字梁沿吊装机械的作业线路横向平行布置;所述“鱼腹”式平台板的纵向截面呈中间向下凸出的“鱼腹”状,前后两边的厚度比中间小,所述“鱼腹”式平台板的前后两边架设在相邻“品”字梁的肩台上,“鱼腹”式平台板的上端面为平面且与“品”字梁的顶面平齐。
5.可选的,所述“鱼腹”式平台板有多块,所述“鱼腹”式平台板沿作业线路纵向分段铺设。
6.可选的,所述“鱼腹”式平台板沿作业线路纵向呈两列平行设置,且两列“鱼腹”式平台板的距离与大型吊装机械的两侧履带距离相等。
7.可选的,所述组合式平台还包括斜坡板,所述斜坡板的一边架在垫板上,斜坡板的另一边架在“品”字梁的肩台上,形成从楼面上到“鱼腹”式平台板的斜坡。
8.可选的,所述垫板下面的结构梁底部若没有支撑,则在垫板位置的结构梁底部设置临时支撑柱进行支顶。
9.可选的,所述“品”字梁的长度能够横跨三个以上的结构柱,在对应的结构柱都设置垫板;所述垫板采用地脚螺栓与楼面固定连接,所述垫板的上端面设置定位块,所述定位块位于“品”字梁的两侧,所述垫板与“品”字梁之间设置橡胶垫;所述定位块采用钢材制作且与垫板焊接或者卡接;所述“鱼腹”式平台板、垫板、“品”字梁和斜坡板都采用钢材制作。
10.本发明还提供了上述的适用于大型吊装机械楼面作业的组合式平台作业方法,包括以下步骤:
11.s100在项目的楼面沿作业线路安装适用于大型吊装机械楼面作业的组合式平台;
12.s200将拆除了配重和主臂的吊装机械移动到组合式平台上;
13.s300给吊装机械组装配重和主臂,然后进行吊装作业;
14.s400吊装作业完成后,拆除吊装机械上的配重和主臂,然后将吊装机械移下组合式平台,再拆除组合式平台。
15.可选的,采用沿作业线路纵向分段铺设的“鱼腹”式平台板形成的组合式平台,若组合式平台不足以沿作业线路全部铺设,则在进行吊装作业时进行以下操作:
16.根据吊装机械的移动方向,拆除吊装机械后面最末端的一段“鱼腹”式平台板、“品”字梁及垫板,将拆下的“鱼腹”式平台板、“品”字梁及垫板挪移至吊装机械前端续接组合式平台,如此循环以完成吊装作业。
17.可选的,在s100步骤中,所述组合式平台安装前,采用以下公式分别计算组合式平台的“鱼腹”式平台板和“品”字梁受力的最大变形量:
[0018][0019]
上式中,y表示“鱼腹”式平台板或者“品”字梁的最大变形量;θ表示“鱼腹”式平台板或者“品”字梁的弯曲变形角度,f
i
表示“鱼腹”式平台板或者“品”字梁的i点载荷;l
i
表示“鱼腹”式平台板或者“品”字梁的两端支撑点距离;e表示“鱼腹”式平台板或者“品”字梁所用材质的弹性模量,例如对于结构钢e=2100000牛顿/平方毫米;i表示材质的截面惯矩,可从相应材质的性能表中查得;r表示变形系数;
[0020]
在“鱼腹”式平台板的选择时,应保证“鱼腹”式平台板计算出的最大变形量小于“鱼腹”式平台板下端面与楼面的最小距离;在“品”字梁的选择时,应保证“品”字梁的计算出的最大变形量小于垫板厚度。
[0021]
可选的,在s100步骤中,所述组合式平台安装前,先进行实体承载能力验证,验证方法如下:
[0022]
检测需要使用的每根结构柱或者结构梁的实际损伤情况,采用以下公式计算实体承载能力:
[0023][0024]
上式中,f
k
表示第k根结构柱或者结构梁的实体承载能力;f
t
表示t时刻钢筋的拉力,单位为kn;a表示结构柱或者结构梁的矩形截面厚度,单位为mm;d表示结构柱或者结构梁的损伤层厚度,单位为mm;d
u
表示混凝土表层的剥落深度,单位为mm;δ表示混凝土的强度系数,取值由结构柱或者结构梁采用的混凝土强度确定;p
t
表示t时刻混凝土的抗压强度,单位mpa;b表示结构柱或者结构梁的矩形截面宽度,单位为mm;
[0025]
再采用下面公式确定楼面作业中单根结构柱或者结构梁的需要的承载力阈值:
[0026][0027]
上式中,f0表示楼面作业中单根结构柱或者结构梁的需要的承载力阈值;k1表示安全系数,k1>1;n表示;m1表示组合式平台的质量,单位为kg;m2表示吊装机械的总质量,单位为kg;m3表示吊装机械的最大单次吊装物品质量,单位为kg;
[0028]
若f
k
≥f0,则表示第k根结构柱或者结构梁的实体承载能力满足使用要求;
[0029]
若f
k
<f0,则表示第k根结构柱或者结构梁需要进行加固处理才能满足使用要求。
[0030]
本发明的组合式平台和作业方法,以“鱼腹”式平台板和“品”字梁搭建吊装机械的作业平台,通过垫板把品”字梁与楼面隔离,垫板设置在建筑的结构柱或者结构梁承重结构上,吊装机械先拆除配重和主臂减轻重量,然后从楼面移动到作业平台,再安装配重和主臂并进行吊装作业,作业完成后再重新拆除配重和主臂然后把吊装机械移下组合式平台,使得吊装机械进行吊装作业的重量直接传递到建筑的承重结构体上,避免对单纯的楼面形成较大的压力,保障吊装作业的安全顺利进行,且不会对楼面造成损坏。
[0031]
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
[0032]
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
[0033]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
[0034]
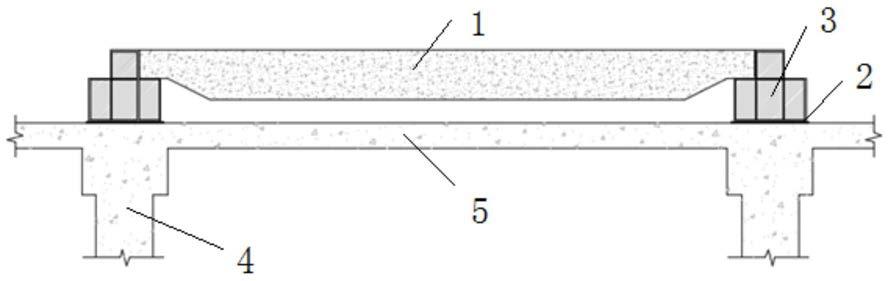
图1为本发明实施例中一种适用于大型吊装机械楼面作业的组合式平台立面示意图;
[0035]
图2为图1适用于大型吊装机械楼面作业的组合式平台实施例的平面示意图;
[0036]
图3为设有斜坡板的适用于大型吊装机械楼面作业的组合式平台立面示意图;
[0037]
图4为图3适用于大型吊装机械楼面作业的组合式平台实施例的部分放大图;
[0038]
图5为设有斜坡板且分段的适用于大型吊装机械楼面作业的组合式平台立面示意图;
[0039]
图6为图5适用于大型吊装机械楼面作业的组合式平台实施例的平面示意图;
[0040]
图7为适用于大型吊装机械楼面作业的组合式平台作业方法流程图。
[0041]
图8为分段的适用于大型吊装机械楼面作业的组合式平台不足以沿作业线路全部铺设的初始铺设状态平面图;
[0042]
图9为根据作业需要对图8组合式平台的分段进行第一次“拆除——挪移——续接”操作后的铺设状态平面图。
[0043]
图中:1
‑“
鱼腹”式平台板,2
‑
垫板,3
‑“
品”字梁,4
‑
结构柱,5
‑
楼面,6
‑
斜坡板,7
‑
结构梁,8
‑
临时支撑柱,9
‑
定位块,31
‑
肩台。
具体实施方式
[0044]
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
[0045]
如图1所示,本发明实施例提供了一种适用于大型吊装机械楼面作业的组合式平台,包括“鱼腹”式平台板1、多个垫板2和多个“品”字梁3;所述垫板2设置在结构柱4或者结构梁7位置的楼面5上;所述“品”字梁3的两端架设在垫板2上,且多个“品”字梁3沿吊装机械的作业线路横向平行布置;所述“鱼腹”式平台板1的纵向截面呈中间向下凸出的“鱼腹”状,前后两边的厚度比中间小,所述“鱼腹”式平台板1的前后两边架设在相邻“品”字梁3的肩台
31上,“鱼腹”式平台板1的上端面为平面且与“品”字梁3的顶面平齐。
[0046]
上述技术方案的工作原理和有益效果为:以“鱼腹”式平台板和“品”字梁搭建吊装机械的作业平台,通过垫板把品”字梁与楼面隔离,垫板设置在建筑的结构柱或者结构梁承重结构上,垫板将“品”字梁端部垫高,“品”字梁中间位置与结构楼板分离,吊装机械在组合式平台进行吊装作业,其作业的重量直接传递到建筑的承重结构体上,履带式吊装机械等在作业平台上作业时,结构楼板不参与受力,保护结构安全,保障吊装作业的安全顺利进行,且不会对楼面造成损坏。另外,按一般的作业平台设计思路,梁高约1m,平台板厚(高)约0.7m,平台板架在梁上,使得平台顶面距离楼面的高度将达到1.7m;而本发明采用的“品”字梁和“鱼腹”式平台板的组合,“品”字梁高1m,其肩台位置高0.6m,“鱼腹”式平台板中间部位厚(高)0.7m,前后两端厚(高)0.4m,搭建形成的组合式平台顶面距离楼面的高度为1m;由此可见“品”字梁和“鱼腹”式平台板的组合,有效降低了吊装机械的作业面高度,上下作业面更方便,降低了吊装机械工作时的重心,吊装更安全。“品”字梁的肩台对“鱼腹”式平台板形成了卡位配合,“鱼腹”式平台板不会发生移动,使得组合式平台更为平稳。该组合式平台可以拆装,能够重复使用。
[0047]
在一个实施例中,如图2、5和6所示,所述“鱼腹”式平台板1有多块,所述“鱼腹”式平台板1沿作业线路纵向分段铺设;“鱼腹”式平台板1沿作业线路纵向呈两列平行设置,且两列“鱼腹”式平台板1的距离与吊装机械的两侧履带距离相等。
[0048]
上述技术方案的工作原理和有益效果为:该方案把“鱼腹”式平台板制作成多块,使得单块的重量较轻,方便进行运输和拆装操作;而把“鱼腹”式平台板按照吊装机械的两侧履带距离设置成平行两列,不但使得单块的重量较轻,还减小了组合式平台的“鱼腹”式平台铺设面积,减轻了组合式平台整体的重量,从而减轻了建筑结构所承受的总压力。
[0049]
在一个实施例中,如图4
‑
6所示,所述组合式平台还包括斜坡板6,所述斜坡板6的一边架在垫板2上,斜坡板6的另一边架在“品”字梁3的肩台31上,形成从楼面上到“鱼腹”式平台板1的斜坡;所述“鱼腹”式平台板1、垫板2、“品”字梁3和斜坡板6都采用钢材制作。
[0050]
上述技术方案的工作原理和有益效果为:通过设置斜坡板,形成从楼面上到“鱼腹”式平台板的导向斜坡,吊装机械可以沿着斜坡板形成的倾斜面移动到组合式平台上,移动方便,解决了履带吊上到组合式操作平台上的问题。
[0051]
在一个实施例中,如图5所示,所述垫板2下面的结构梁7底部若没有支撑,则在垫板2位置的结构梁7底部设置临时支撑柱8进行支顶;所述“品”字梁的长度能够横跨三个以上的结构柱,在对应的结构柱都设置垫板;如图4所示,所述垫板2采用地脚螺栓与楼面5固定连接,所述垫板2的上端面设置定位块9,所述定位块9位于“品”字梁3的两侧;所述定位块9采用钢材制作且与垫板2焊接或者卡接;所述垫板2与“品”字梁3之间设置橡胶垫。
[0052]
上述技术方案的工作原理和有益效果为:在无结构柱的结构梁位置安装垫板时,通过结构梁底部设置在临时支撑柱,保证操作平台垫板处的竖向承载力。“品”字梁的长度可以设置的长一些,使得其能够横跨三个以上的结构柱,可减轻吊装作业时单个结构柱的受力;垫板采用地脚螺栓与楼面固定连接可以防止垫板发生相对楼面的移动,垫板的上端面设置定位块可以防止“品”字梁发生相对于垫板的移动,避免造成受力偏移,影响楼面及吊装作业的安全;橡胶垫可填补因楼面、垫板或者“品”字梁不平形成的配合间隙,能够有效抵消由于不平等因素造成的操作平台晃动,避免发生噪音。
[0053]
如图7所示,本发明实施例提供了一种适用于大型吊装机械楼面作业的组合式平台作业方法,包括以下步骤:
[0054]
s100在项目的楼面沿作业线路安装适用于大型吊装机械楼面作业的组合式平台;
[0055]
s200将拆除了配重和主臂的吊装机械移动到组合式平台上;
[0056]
s300给吊装机械组装配重和主臂,然后进行吊装作业;
[0057]
s400吊装作业完成后,拆除吊装机械上的配重和主臂,然后将吊装机械移下组合式平台,再拆除组合式平台。
[0058]
上述技术方案的工作原理和有益效果为:根据建筑的结构柱或者结构梁承重结构搭建组合式平台,吊装机械的配重和主臂占据很大的重量比例,吊装机械先拆除配重和主臂等减轻重量,然后从楼面移动到作业平台,再安装配重和主臂并进行吊装作业,吊装机械的履带也可以先拆除到组合式平台再安装,作业完成后再重新拆除配重和主臂然后把吊装机械移下组合式平台,使得吊装机械进行吊装作业的重量直接传递到建筑的承重结构体上,避免对单纯的楼面形成较大的压力,保障吊装作业的安全顺利进行,且不会对楼面造成损坏。
[0059]
在一个实施例中,采用沿作业线路纵向分段铺设的“鱼腹”式平台板形成的组合式平台,若组合式平台不足以沿作业线路全部铺设,则在进行吊装作业时进行以下操作:
[0060]
根据吊装机械的移动方向,拆除吊装机械后面最末端的一段“鱼腹”式平台板、“品”字梁及垫板,将拆下的“鱼腹”式平台板、“品”字梁及垫板挪移至吊装机械前端续接组合式平台,如此循环以完成吊装作业。
[0061]
上述技术方案的工作原理为:如图8和图9所示,图8为最初的组合式平台位置,吊装机械的移动方向为从“鱼腹”式平台板1a经过“鱼腹”式平台板1b向“鱼腹”式平台板1c移动,“鱼腹”式平台板1c还不是作业线路的端头,所以在吊装机械移动过了“鱼腹”式平台板1a后,拆除“鱼腹”式平台板1a、“品”字梁3a及“品”字梁3a的垫板,如图9所示挪移至“品”字梁3d的右边续接组合式平台;随着吊装机械的前进,下一次挪移“鱼腹”式平台板1b、“品”字梁3b及“品”字梁3b的垫板至“品”字梁3a的右边;再下一次挪移“鱼腹”式平台板1c、“品”字梁3c及“品”字梁3c的垫板至“品”字梁3b的右边;如此循环至达到作业线路的右边端头。当吊装机械反向移动时,则对组合式平台的分段进行反向“拆除——挪移——续接”操作。
[0062]
上述技术方案的有益效果为:通过该方案,若准备的搭建组合式平台的部件不足,或者作业线路较长,或者存在多个不同方向的吊装作业位置时,采用此操作仍然可以保障吊装作业的顺利进行,该方案采用有限的组合式平台的部件通过循环倒用的方式解决了多位置吊装作业的问题。
[0063]
在一个实施例中,在s100步骤中,所述组合式平台安装前,采用以下公式分别计算组合式平台的“鱼腹”式平台板和“品”字梁受力的最大变形量:
[0064][0065]
上式中,y表示“鱼腹”式平台板或者“品”字梁的最大变形量;θ表示“鱼腹”式平台板或者“品”字梁的弯曲变形角度,f
i
表示“鱼腹”式平台板或者“品”字梁的i点载荷;l
i
表示“鱼腹”式平台板或者“品”字梁的两端支撑点距离;e表示“鱼腹”式平台板或者“品”字梁所用材质的弹性模量,例如对于结构钢e=2100000牛顿/平方毫米;i表示材质的截面惯矩,可
从相应材质的性能表中查得;r表示变形系数;
[0066]
在“鱼腹”式平台板的选择时,应保证“鱼腹”式平台板计算出的最大变形量小于“鱼腹”式平台板下端面与楼面的最小距离;在“品”字梁的选择时,应保证“品”字梁的计算出的最大变形量小于垫板厚度。
[0067]
上述技术方案的工作原理和有益效果为:在组合式平台安装前,通过上述计算公式,分别分析“鱼腹”式平台板和“品”字梁的受力,以指导“鱼腹”式平台板和“品”字梁的截面规格选择,保证吊装作业时组合式平台采用的“鱼腹”式平台板和“品”字梁的变形不会导致与楼面接触,避免把受力传递给楼面,以保护楼面安全。
[0068]
在一个实施例中,在s100步骤中,所述组合式平台安装前,先进行实体承载能力验证,验证方法如下:
[0069]
检测需要使用的每根结构柱或者结构梁的实际损伤情况,采用以下公式计算实体承载能力:
[0070][0071]
上式中,f
k
表示第k根结构柱或者结构梁的实体承载能力;f
t
表示t时刻钢筋的拉力,单位为kn;a表示结构柱或者结构梁的矩形截面厚度,单位为mm;d表示结构柱或者结构梁的损伤层厚度,单位为mm;d
u
表示混凝土表层的剥落深度,单位为mm;δ表示混凝土的强度系数,取值由结构柱或者结构梁采用的混凝土强度确定,例如,若混凝土的强度等级不超过50mpa则取1.0,若混凝土的强度等级为80mpa则取0.94;p
t
表示t时刻混凝土的抗压强度,单位mpa;b表示结构柱或者结构梁的矩形截面宽度,单位为mm;
[0072]
再采用下面公式确定楼面作业中单根结构柱或者结构梁的需要的承载力阈值:
[0073][0074]
上式中,f0表示楼面作业中单根结构柱或者结构梁的需要的承载力阈值;k1表示安全系数,k1>1;n表示;m1表示组合式平台的质量,单位为kg;m2表示吊装机械的总质量,单位为kg;m3表示吊装机械的最大单次吊装物品质量,单位为kg;
[0075]
若f
k
≥f0,则表示第k根结构柱或者结构梁的实体承载能力满足使用要求;
[0076]
若f
k
<f0,则表示第k根结构柱或者结构梁需要进行加固处理才能满足使用要求。
[0077]
上述技术方案的工作原理和有益效果为:本方案通过预先对建筑结构体中作业需要使用的结构柱和结构梁的实际损伤情况进行检测,然后采用预设的承载能力计算公式得到其实际承载能力数值,再根据组合式平台与作业情况,在考虑安全系数的情况下计算作业时最不利状况的承载能力要求,以此作为承载能力阈值基准,通过对比确定各结构柱和结构梁的实际承载能力是否能够满足要求,若不能满足使用要求则对应进行加固,加固后使得其能够满足使用要求;本方案可以避免对建筑承载定性评估时可能存在的评估错误或者失误,提高作业安全。
[0078]
在一个实施例中,在s100步骤中,所述组合式平台安装前,也可以先对结构柱和结构梁进行损伤检测,检测方法如下:
[0079]
s110将结构柱和结构梁划分为n个结构单元,在不同节点上安装加速度计m个,利
用加速度计测量结构柱和结构梁在外荷载压力作用下的响应w1;
[0080]
s120混合算法参数初始化,在搜索域内随机产生结构参数,假定结构损伤为刚度的变化而质量不发生变化,结构柱和结构梁的刚度损伤程度可用损伤因子α
j
,j=1,2,...,u,α
j
∈[0,1],α
j
=0表示结构单元没有损伤,α
j
=1表示结构单元完全损伤,损伤结构单元的整体刚度矩阵为
[0081][0082]
上式中,p表示损伤结构单元的整体刚度矩阵;u表示损伤结构单元的数量;p
j
表示损伤结构单元j的刚度矩阵;e表示自然常数;
[0083]
然后利用纽马克
‑
β法计算结构的加速度w2;
[0084]
s130构建结构柱和结构梁的目标函数为:
[0085]
f(x)=||w1‑
w2||
[0086]
上式中,f(x)表示结构柱和结构梁的目标函数;
[0087]
s140利用混合蝴蝶算法和差分进化的元启发式算法进行目标函数优化,直到达到最大迭代次数或者满足精确要求;
[0088]
s150根据损伤检测,对存在损伤的结构柱或者结构梁进行加固处理。
[0089]
上述技术方案的工作原理和有益效果为:该方案采用的纽马克
‑
β法(newmark
‑
β)是一种将线性加速度方法普遍化的方法,纽马克
‑
β法可认为是概括了平均常加速度和线性加速度算法的一种广义算法,纽马克
‑
β法有拟静力增量方程形式和不同类型的拟静力全量方程形式。差分进化(differential evolution,de)是由storn和price于1997年提出的一种智能优化算法,是一种针对实变函数优化的随机搜索算法,差分进化算法利用选择、交叉和变异三个操作来更新种群个体;首先,利用父代个体间的差分矢量进行变异得到变异个体;然后,该变异个体以一定的概率与父代个体进行交叉得到一个试验个体;最后,采用一对一的竞争机制贪婪地选择试验个体和父代个体之间的较优者作为子代对种群进行更新;具有原理简单、易于实现、全局寻优能力较好、鲁棒性强等特点。元启发式算法是相对于最优化算法提出来的,一个问题的最优化算法可以求得该问题的最优解,而元启发式算法是一个基于直观或经验构造的算法,它可以在可接受的花费(指计算时间和空间)下给出问题的一个可行解,并且该可行解与最优解的偏离程度不一定可以事先预计,元启发式算法包含很多形式的算法,其中有差分进化算法。采用该方案可以准确反馈结构损伤位置和损伤程度,为搭建组合式平台提供建筑结构的基础数据,能够提前发现建筑结构存在的损伤问题,以及时进行相应的加固处理,避免由于建筑结构本身存在的损伤引发吊装作业的安全事故。
[0090]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1