一种建筑施工用地面水平线描画设备的制作方法
1.本发明涉及一种地面水平线描画设备,尤其涉及一种建筑施工用地面水平线描画设备。
背景技术:
2.在建筑施工过程中,为了方便建筑工人进行建筑,需要在地面上描画各种水平线,用来辅助工人工作,同时用来警示工人,现在画水平线的方式比较单一。
3.专利申请号为cn201320139289.6地面施工画线装置,包括背灌、软管、画线笔,所述背灌顶端安装有旋转密封盖,侧面固接有背带,下底面连接软管,所述软管与背灌下底面连接处设置有开关夹,所述画线笔内设有通体空腔,所述软管的另一端与通体空腔的上端连接,所述画线笔笔尖的下端安装有活动滚子,所述画线笔由不锈钢制成,所述背灌由塑料制成,所述软管由橡胶制成。
4.该地面施工画线装置通过设置活动滚子,手动将活动滚子在地面上进行滚动,实现水平线的效果,这样水平线容易画歪,而且手持画线装置,费时费力,因此现在研发一种能够实现自动描画水平线,以及画直线精准度高的建筑施工用地面水平线描画设备。
技术实现要素:
5.为了克服使用现有地面施工画线装置画水平线,水平线容易画歪,费时费力的缺点,要解决的技术问题是:提供一种能够实现自动描画水平线,以及画直线精准度高的建筑施工用地面水平线描画设备。
6.技术方案:一种建筑施工用地面水平线描画设备,包括有支撑架、第一转轴、第一车轮、推铲机构和描画机构,支撑架底部左右两侧均前后对称转动式连接有第一转轴,第一转轴上均设置有第一车轮,支撑架上设置有用于将地面的杂质铲除的推铲机构,支撑架上设置有用于对地面描画水平线的描画机构;描画机构包括有支撑板、第二转轴、储存罐、盖子、第一活动杆、海绵块、第一支撑块、第三转轴、第一活动板和第二光电传感器,推铲机构的部件的左侧设置有支撑板,支撑板左侧转动式连接有第二转轴,第二转轴上设置有用于储存颜料的储存罐,储存罐顶部中间螺纹式连接有盖子,储存罐内左侧滑动式连接有第一活动杆,第一活动杆左侧可拆卸的设置有用于画线的海绵块,第一活动杆右侧和储存罐内左侧之间设置有弹性件,储存罐内左侧设置有第一支撑块,第一支撑块右上侧转动式连接有第三转轴,第三转轴上设置有第一活动板,第一活动板和第一支撑块之间设置有涡卷弹簧,支撑架右后侧设置有第二光电传感器。
7.作为本发明的一种优选技术方案,推铲机构包括有第一支撑杆、第一减速电机、第二支撑杆、丝杆、第一活动块、第一光电传感器和第二减速电机,支撑架顶部左侧设置有第一支撑杆,第一支撑杆顶部中间通过螺栓设置有第一减速电机,支撑架顶部右侧设置有第二支撑杆,第一减速电机输出轴设置有丝杆,丝杆右侧和第二支撑杆转动式连接,丝杆上螺纹式连接有用于对地面的杂质进行铲除的第一活动块,第一活动块左侧和支撑板焊接,第
一活动块和支撑架滑动式连接,支撑架左后侧设置有第一光电传感器,支撑架左前侧设置有第二减速电机,第二减速电机的输出轴和第二转轴上均设置有齿轮,两个齿轮啮合。
8.作为本发明的一种优选技术方案,还包括有用于将第一活动块右侧进行遮盖的遮挡机构,遮挡机构包括有第一支撑柱、第二活动板、第四转轴、第二活动杆、第二支撑柱、第一电动推杆和第三活动杆,第一活动块顶部右侧的前后两侧均设置有第一支撑柱,第一支撑柱上均转动式连接有第四转轴,第四转轴之间设置有第二活动板,第四转轴内侧均设置有第二活动杆,第二活动杆之间滑动式连接有第三活动杆,第一活动块顶部中间通过螺栓设置有两个第二支撑柱,第二支撑柱之间设置有第一电动推杆,第一电动推杆伸缩杆右侧和第三活动杆连接。
9.作为本发明的一种优选技术方案,还包括有能够调节支撑架移动方向的转向机构,转向机构包括有铁质转杆、电磁铁、扭簧、第二支撑块、第二车轮和第一转轮,支撑架右侧转动式连接有铁质转杆,铁质转杆为铁制品,铁质转杆上部和支撑架之间设置有扭簧,铁质转杆底部连接有第二支撑块,第二支撑块上转动式连接有第二车轮,铁质转杆右下侧连接有第一转轮,支撑架内右部的前后两侧也均转动式连接有第一转轮,支撑架顶部右侧的中间设置有电磁铁。
10.作为本发明的一种优选技术方案,还包括有用于牵拉铁质转杆的牵拉机构,牵拉机构包括有第三支撑柱、第五转轴、活动架、压力传感器、拉绳、第四支撑柱、第六转轴和第二转轮,支撑架左上侧的前后两侧均设置有第三支撑柱,第三支撑柱下部均转动式连接有第五转轴,第五转轴上均设置有活动架,活动架左侧均设置有压力传感器,支撑架左下侧的前后两侧均设置有第四支撑柱,第四支撑柱下部均转动式连接有第六转轴,第六转轴上均设置有第二转轮,活动架底部右侧均设置有拉绳,拉绳分别绕过第二转轮和前后两个的第一转轮上,拉绳穿过支撑架内部,拉绳右端分别和中间的第一转轮连接,第一转轮和第二转轮对拉绳进行导向。
11.作为本发明的一种优选技术方案,还包括有能够将支撑架固定在地面的固定机构,支撑架上设有固定机构。
12.作为本发明的一种优选技术方案,固定机构包括有第三支撑块、第五支撑柱、第二电动推杆、第二活动块、第三活动块和弹簧,支撑架顶部左侧的前后两侧均设置有第三支撑块,第三支撑块顶部均设置有第五支撑柱,第五支撑柱上均通过螺栓设置有第二电动推杆,第二电动推杆的伸缩杆底部均设置有第二活动块,第二活动块和第三支撑块均滑动式连接,第二活动块下部均滑动式连接有用于直接和地面进行接触的第三活动块,第三活动块顶部左右两侧和第二活动块之间均设置有弹簧。
13.作为本发明的一种优选技术方案,还包括有控制箱,支撑架左前侧设置有控制箱,控制箱内安装有蓄电池、控制模块和电源模块,蓄电池为整个建筑施工用地面水平线描画设备蓄电池供电,蓄电池的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,压力传感器、第一光电传感器和第二光电传感器均通过电性和控制模块连接,第一减速电机、第二减速电机、第一电动推杆、第二电动推杆和电磁铁均通过外围电路和控制模块连接。
14.有益效果为:1、本发明通过第一减速电机的工作,能够带动丝杆进行转动,从而带
动第一活动块向右移动先将地面上的杂质进行清除,为画水平线作业提供帮助,海绵块随之也向右移动进行画水平线,如此能够提高画水平线的效率。
15.2、本发明采用第一电动推杆的伸缩杆进行伸缩的方式,能够带动第三活动杆左右移动,从而使得第二活动板进行转动,当铲除杂质时,第二活动板自动转动打开,当铲除完毕后,第二活动板自动转动关闭,如此不仅可以对杂质起到阻挡作用,同时能够对第一活动块的右侧进行防护。
16.3、本发明采用转动活动架的方式,通过拉绳,使得铁质转杆的转动方向进行不断调整,从而使得第二车轮的转动方向被调整。
附图说明
17.图1为本发明的立体结构示意图。
18.图2为本发明的a处放大立体结构示意图。
19.图3为本发明的推铲机构立体结构示意图。
20.图4为本发明的描画机构立体结构示意图。
21.图5为本发明的描画机构剖视立体结构示意图。
22.图6为本发明的b处放大立体结构示意图。
23.图7为本发明的遮挡机构第一种立体结构示意图。
24.图8为本发明的遮挡机构第二种立体结构示意图。
25.图9为本发明的转向机构第一种立体结构示意图。
26.图10为本发明的转向机构第二种立体结构示意图。
27.图11为本发明的c处放大立体结构示意图。
28.图12为本发明的牵拉机构立体结构示意图。
29.图13为本发明的d处放大立体结构示意图。
30.图14为本发明的固定机构立体结构示意图。
31.图15为本发明的固定机构剖视立体结构示意图。
32.图16为本发明的e处放大立体结构示意图。
33.图17为本发明的电路框图。
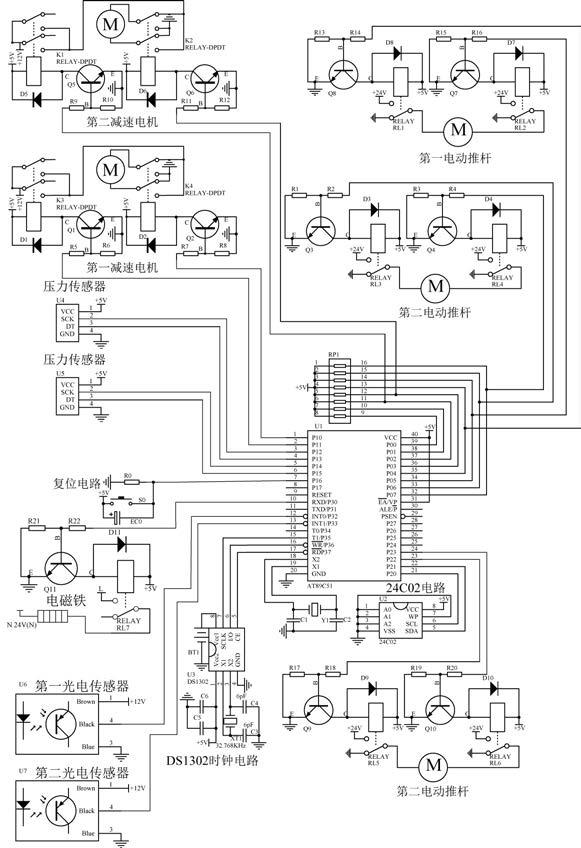
34.图18为本发明的电路原理图。
35.以上附图中:1:支撑架,2:第一转轴,3:第一车轮,4:控制箱,5:推铲机构,51:第一支撑杆,52:第一减速电机,53:第二支撑杆,54:丝杆,55:第一活动块,56:第一光电传感器,6:描画机构,61:支撑板,62:第二转轴,63:储存罐,64:盖子,65:第一活动杆,66:海绵块,67:第一支撑块,68:第三转轴,69:第一活动板,610:第二光电传感器,611:第二减速电机,7:遮挡机构,71:第一支撑柱,72:第二活动板,73:第四转轴,74:第二活动杆,75:第二支撑柱,76:第一电动推杆,77:第三活动杆,8:转向机构,81:铁质转杆,82:电磁铁,83:扭簧,84:第二支撑块,85:第二车轮,86:第一转轮,9:牵拉机构,91:第三支撑柱,92:第五转轴,93:活动架,94:压力传感器,95:拉绳,96:第四支撑柱,97:第六转轴,98:第二转轮,10:固定机构,101:第三支撑块,102:第五支撑柱,103:第二电动推杆,104:第二活动块,105:第三活动块,106:弹簧。
具体实施方式
36.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
37.实施例1一种建筑施工用地面水平线描画设备,如图1-18所示,包括有支撑架1、第一转轴2、第一车轮3、推铲机构5和描画机构6,支撑架1底部左右两侧均前后对称转动式连接有第一转轴2,第一转轴2上均设有第一车轮3,第一车轮3在地面上滚动,便于移动,支撑架1上设有推铲机构5,推铲机构5用于将地面的杂质铲除,支撑架1上设有描画机构6,描画机构6用于对地面描画水平线,描画机构6包括有支撑板61、第二转轴62、储存罐63、盖子64、第一活动杆65、海绵块66、第一支撑块67、第三转轴68、第一活动板69和第二光电传感器610,推铲机构5的部件的左侧设有支撑板61,支撑板61左侧转动式连接有第二转轴62,支撑板61用于支撑第二转轴62,第二转轴62上设有储存罐63,储存罐63用于储存颜料,储存罐63顶部中间螺纹式连接有盖子64,储存罐63内左侧滑动式连接有第一活动杆65,第一活动杆65左侧可拆卸的设有海绵块66,海绵块66用于画线,第一活动杆65右侧和储存罐63内左侧之间设有弹性件,储存罐63内左侧设有第一支撑块67,第一支撑块67右上侧转动式连接有第三转轴68,第三转轴68上设有第一活动板69,第一活动板69可以堵住第一支撑块67中部,第一活动板69和第一支撑块67之间设有涡卷弹簧,支撑架1右后侧焊接有第二光电传感器610。
38.推铲机构5包括有第一支撑杆51、第一减速电机52、第二支撑杆53、丝杆54、第一活动块55、第一光电传感器56和第二减速电机611,支撑架1顶部左侧焊接有第一支撑杆51,第一支撑杆51顶部中间通过螺栓设有第一减速电机52,支撑架1顶部右侧焊接有第二支撑杆53,第一减速电机52输出轴设有丝杆54,丝杆54右侧和第二支撑杆53转动式连接,丝杆54上螺纹式连接有第一活动块55,第一活动块55用于对地面的杂质进行铲除,第一活动块55左侧和支撑板61焊接,第一活动块55和支撑架1滑动式连接,支撑架1左后侧设有第一光电传感器56,支撑架1左前侧设有第二减速电机611,第二减速电机611的输出轴和第二转轴62上均设有齿轮,两个齿轮啮合。
39.当人们需要对建筑施工处的地面进行描画地面水平线时,可以使用本设备进行操作,首先通过推动支撑架1,将本设备移动至需要画水平线的位置,使得第一车轮3在地面上进行滚动,能够加快本设备的移动速度,然后将盖子64打开,将颜料装进储存罐63内,然后关闭盖子64,然后,人们可以按压第一光电传感器56,此时第一光电传感器56检测到光亮值小于额定值,控制模块控制第二减速电机611进行工作1秒后停止工作,第二减速电机611输出轴转动带动齿轮转动,齿轮转动带动第二转轴62进行转动,第二转轴62进行转动带动储存罐63向下转动45度倾斜角,使得海绵块66和地面接触,同时海绵块66会带动第一活动杆65朝向第一支撑块67一侧进行移动,弹性件被拉伸,第一活动杆65会挤压第一活动板69,将第一活动板69向右侧转动打开,使得涡卷弹簧被扭转,此时,颜料通过第一支撑块67和第一活动杆65从海绵块66流出;同时控制模块控制第一减速电机52进行工作5秒后停止工作,第一减速电机52输出轴转动带动丝杆54转动,丝杆54转动带动第一活动块55向右移动,第一活动块55向右移动先将地面上的杂质进行铲除,而且杂质会收集到第一活动块55内,第一
活动块55向右移动带动支撑板61向右移动,支撑板61向右移动带动第二转轴62和储存罐63向右移动,储存罐63向右移动带动第一活动杆65和海绵块66向右移动,此时海绵块66向右移动能够在地面上进行画线;当第一活动块55向右移动和第二光电传感器610接触时,第二光电传感器610检测到光亮值小于额定值,控制模块控制第一减速电机52进行反向工作5秒后停止工作,第一减速电机52输出轴反转带动丝杆54反转,带动第一活动块55以及上面的部件向左移动复位,同时控制模块控制第二减速电机611进行反向工作1秒后停止工作,进而使得储存罐63以及上面的部件向上转动复位,当海绵块66和地面分离时,在弹性件的作用下,带动第一活动杆65和海绵块66向左移动复位,在涡卷弹簧的作用下,带动第一活动板69转动复位,此时颜料停止流出;然后将杂质取出即可。
40.还包括有遮挡机构7,遮挡机构7用于将第一活动块55右侧进行遮盖,遮挡机构7包括有第一支撑柱71、第二活动板72、第四转轴73、第二活动杆74、第二支撑柱75、第一电动推杆76和第三活动杆77,第一活动块55顶部右侧的前后两侧均焊接有第一支撑柱71,第一支撑柱71上均转动式连接有第四转轴73,第四转轴73之间设有第二活动板72,第二活动板72为铁制品,第二活动板72能够对第一活动块55右侧进行遮盖,可以避免收集好的杂质向右滑出,第四转轴73内侧均设有第二活动杆74,第二活动杆74为中空结构,第二活动杆74之间滑动式连接有第三活动杆77,第一活动块55顶部中间通过螺栓设有两个第二支撑柱75,第二支撑柱75之间设有第一电动推杆76,第一电动推杆76伸缩杆右侧和第三活动杆77连接。
41.当第一光电传感器56检测到光亮值小于额定值时,控制模块控制第一电动推杆76的伸缩杆进行收缩运动1秒后停止工作,带动第三活动杆77向左移动,第三活动杆77向左移动带动第二活动杆74进行向左摆动,同时通过第四转轴73带动第二活动板72向右上侧转动打开,从而能够使得第一活动块55右侧被打开,进而使得第一活动块55向右移动铲除并且收集杂质;当第二光电传感器610检测到光亮值小于额定值时,控制模块控制第一电动推杆76的伸缩杆进行伸长运动1秒后停止工作,带动第三活动杆77向右移动,进而通过第四转轴73带动第二活动板72转动关闭,使得第一活动块55右侧被第二活动板72进行遮挡,能够对杂质起到阻挡作用。
42.还包括有转向机构8,转向机构8能够调节支撑架1的移动方向,转向机构8包括有铁质转杆81、电磁铁82、扭簧83、第二支撑块84、第二车轮85和第一转轮86,支撑架1右侧转动式连接有铁质转杆81,铁质转杆81为铁制品,铁质转杆81上部和支撑架1之间设有扭簧83,铁质转杆81底部连接有第二支撑块84,第二支撑块84上转动式连接有第二车轮85,第二车轮85转动能够调节支撑架1移动方向,铁质转杆81右下侧连接有第一转轮86,支撑架1内右部的前后两侧也均转动式连接有第一转轮86,支撑架1顶部右侧的中间设有电磁铁82,电磁铁82能够将铁质转杆81进行吸附固定。
43.还包括有牵拉机构9,牵拉机构9用于牵拉铁质转杆81,牵拉机构9包括有第三支撑柱91、第五转轴92、活动架93、压力传感器94、拉绳95、第四支撑柱96、第六转轴97和第二转轮98,支撑架1左上侧的前后两侧均焊接有第三支撑柱91,第三支撑柱91下部均转动式连接有第五转轴92,第五转轴92上均设有活动架93,活动架93左侧均设有压力传感器94,支撑架1左下侧的前后两侧均焊接有第四支撑柱96,第四支撑柱96下部均转动式连接有第六转轴97,第六转轴97上均设有第二转轮98,活动架93底部右侧均设有拉绳95,拉绳95分别绕过第二转轮98和前后两个的第一转轮86上,拉绳95穿过支撑架1内部,拉绳95右端分别和中间的
第一转轮86连接,第一转轮86和第二转轮98对拉绳95进行导向,通过拉动拉绳95能够使得第一转轮86进行转动,进而实现对铁质转杆81的牵拉。
44.当人们需要对本设备的移动方向进行调整时,可以通过转动活动架93实现,如果需要将设备的右部向前调整时,可以转动前侧的活动架93,如果需要将设备的右部向后调整时,可以转动后侧的活动架93;当转动前侧的活动架93时,手动将前侧的活动架93左侧向下按压,使得前侧的压力传感器94受到压力,控制模块控制电磁铁82延时2秒后进行工作,在2秒期间,前侧的活动架93右侧拉动前侧的拉绳95,拉绳95使得中间的第一转轮86向前侧摆动,带动铁质转杆81向前侧摆动,扭簧83被扭转,进而使得第二支撑块84和第二车轮85向前侧摆动,2秒后,电磁铁82能够对铁质转杆81进行吸附,如此,铁质转杆81的位置则被固定,同时调节好本设备的移动方向,随后移动本设备即可;当转动后侧的活动架93时,人们需要先松开前侧的活动架93,此时前侧的压力传感器94没有受到压力,控制模块控制电磁铁82停止工作,此时电磁铁82不会吸附铁质转杆81,在扭簧83的作用下,带动铁质转杆81以及上面的部件转动复位,使得前侧的拉绳95被松开,然后人们即可将后侧的活动架93左侧向下按压,重复上述的操作,进而实现将第二车轮85向后摆动的效果。
45.还包括有固定机构10,固定机构10能够将支撑架1固定在地面,固定机构10包括有第三支撑块101、第五支撑柱102、第二电动推杆103、第二活动块104、第三活动块105和弹簧106,支撑架1顶部左侧的前后两侧均焊接有第三支撑块101,第三支撑块101顶部均焊接有第五支撑柱102,第五支撑柱102上均通过螺栓设有第二电动推杆103,第二电动推杆103的伸缩杆底部均设有第二活动块104,第二活动块104和第三支撑块101均滑动式连接,第二活动块104下部均滑动式连接有第三活动块105,第三活动块105用于直接和地面进行接触,第三活动块105顶部左右两侧和第二活动块104之间均设有弹簧106。
46.将本设备移动到指定位置后,当第一光电传感器56检测到光亮值小于额定值,控制模块控制第二电动推杆103伸缩杆进行伸长运动2秒后停止工作,第二电动推杆103伸缩杆伸长带动第二活动块104、第三活动块105和弹簧106向下移动,使得第三活动块105和地面接触,弹簧106被压缩,同时起到缓冲作用,第三活动块105能够将本设备固定在地面上,提高本设备的稳定性;第一减速电机52进行反向工作5秒后停止工作的同时,控制模块控制第二电动推杆103伸缩杆缩短运动2秒后停止工作,进而带动第二活动块104、第三活动块105和弹簧106向上移动复位,在弹簧106的作用下,带动第三活动块105移动复位;重复以上操作即可实现对本设备进行固定的效果。
47.还包括有控制箱4,支撑架1左前侧设有控制箱4,控制箱4内安装有蓄电池、控制模块和电源模块,蓄电池为整个建筑施工用地面水平线描画设备蓄电池供电,蓄电池的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,压力传感器94、第一光电传感器56和第二光电传感器610均通过电性和控制模块连接,第一减速电机52、第二减速电机611、第一电动推杆76、第二电动推杆103和电磁铁82均通过外围电路和控制模块连接。
48.以上对本技术进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1