共享单车及共享单车车库的制作方法
1.本技术涉及共享单车车库的领域,尤其是涉及一种共享单车及共享单车车库。
背景技术:
2.目前,大部分城市均修建了地铁,但是从地铁口至目的地有时会有一定的距离,因此采用骑行的方式去往目的地被多数用户所选择;随着共享单车的兴起,目前多款app均推出了共享单车,共享单车又包括共享自行车和共享电动自行车。
3.使用共享单车时,用户使用手机app进行扫码以对共享单车的车锁进行解锁,骑行完成后,将车辆停放于道路两侧,再将车锁关闭,车锁关闭后,app进行扣费。
4.针对上述中的相关技术,发明人认为,用户骑行完成后,将车辆停放于道路两侧,存在有占用道路面积的缺陷。
技术实现要素:
5.为了减少用户将共享单车随意停放,减少车辆占用道路面积,本技术提供一种共享单车及共享单车车库。
6.第一方面,本技术提供一种共享单车车库,采用如下的技术方案:
7.一种共享单车车库,包括存放组件、多个单车夹持组件、多个提升组件、多个停放架和一个控制组件,所述存放组件包括立柱、存车罩和多个存放架,所述存车罩与所述立柱固定连接,所述存放架与所述存车罩固定连接,所述单车夹持组件用于夹持共享单车,所述提升组件用于驱动所述单车夹持组件沿竖向运动,所述停放架设于所述立柱侧方;所述控制组件包括第一传感器和控制器,所述第一传感器用于检测共享单车是否到位的就位信号,并传递给控制器,所述控制器接收共享单车到位信号后,向共享单车的车锁传递允许锁定信号,控制器用于接收共享单车的已锁信号后控制单车夹持组件和提升组件作业。
8.通过采用上述技术方案,使用时,将共享单车停放于停放架上,第一传感器检测共享单车是否到位的就位信号并传递给控制器,控制器接收到共享单车到位的到位信号后,控制器向共享单车的车锁传递允许锁定信号,车锁接收到允许锁定信号后,人员才可将车锁锁定;将车锁锁定后,车锁向控制器发射已锁信号,控制器接收到已锁信号后,控制器控制单车夹持组件将共享单车夹持,再由控制器控制提升组件驱动单车夹持组件和共享单车上升至所需位置,再由控制器控制单车夹持组件将共享单车挂接至存放架上,可减少共享单车减少占用道路面积;通过设置控制组件,可使得作业人员必须将车辆停放至停放架上才可将车锁关闭,可减少人员将共享单车在停放架以外的位置随意停放,进一步减少共享单车的占地面积。
9.可选的,还包括充电装置,所述充电装置包括转动环、转动驱动组件、多个充电座以及多个电池夹持件,所述转动环转动连接于所述存车罩内,所述转动驱动组件用于驱动所述转动环转动,多个所述充电座沿所述转动环周向分布,所述充电座用于充电,所述电池夹持件用于驱动充电池连接至充电座上,部分所述充电座上可拆卸连接有用于替换的充电
池;所述控制器还包括第二传感器,第二传感器用于检测共享单车的类型,并传递给控制器,控制器接收类型信号后,进行判断,当共享单车类型为电动自行车时,控制器控制充电装置对类型为电动自行车的共享单车充电。
10.通过采用上述技术方案,第二传感器检测共享单车是否为共享电动自行车的类型信号,并将类型信号传递给控制器,当控制器接收到共享单车为共享电动自行车的类型信号后,控制器控制提升组件将共享单车提升的过程中,由充电装置对共享单车的电池进行更换;更换时,电池夹持件将共享单车上的充电池取出,并将充电池与充电座固定,再由转动驱动组件带动转动环转动,将替换电池转动至共享单车处,再由电池夹持件将替换电池与共享单车固定,最后由单车夹持组件和提升组件继续将共享单车放置于存放架上;通过设置充电装置和第二传感器可对共享单车的电池进行自动更换。
11.可选的,所述单车夹持组件包括夹手驱动件、机械夹爪和两个夹持杆,所述提升组件用于驱动所述夹手驱动件竖向运动,所述夹手驱动件用于带动所述机械夹爪运动,所述夹持杆与所述机械夹爪的夹持端固定连接,两个所述夹持杆用于将共享单车的前车轮和车架夹持。
12.通过采用上述技术方案,单车夹持组件将共享单车夹持时,夹手驱动件驱动机械夹爪运动至共享单车处,再由机械夹爪带动夹持杆运动,从而将共享单车的前车轮与车架夹持,可减少共享单车的车轮沿车架摆动,从而将共享单车夹持的更加稳定。
13.可选的,所述存放架包括支撑杆和两个挂钩,所述支撑杆与所述存车罩固定连接,所述挂钩与所述存车罩固定连接,所述支撑杆远离所述存车罩的一端开设有卡槽,且所述卡槽位于所述挂钩远离存车罩的一侧,所述卡槽设于所述挂钩下方,所述挂钩用于供共享单车的车把手嵌入,所述卡槽用于供共享单车的车架嵌入。
14.通过采用上述技术方案,存放共享单车时,将共享单车的车把手挂接于挂钩上,将共享单车的车架挂接于卡槽内,便可将共享单车固定,由于挂钩、支撑杆均匀存车罩固定连接,因此共享单车的车把手和和车架便可被限位,可减少车把手和车架之间转动,可将共享单车挂接的更加牢固。
15.可选的,所述存车罩上设有显示屏。
16.通过采用上述技术方案,显示器可用于展示存车罩内部的车辆停放状况,同时也可用于广告投放。
17.第二方面,本技术提供一种共享单车,采用如下的技术方案:
18.一种共享单车,包括车架、车把手、前叉、两个车轮和一个车锁,所述车把手与所述车架转动连接,所述前叉与所述车把手固定连接,所述车轮与所述前叉转动连接,所述车锁用于接收所述控制器发出的允许锁定信号,以及向控制器传递车锁的已锁信号。
19.通过采用上述技术方案,使用时,将共享单车推动至停放架上,当车锁接收到允许锁定信号后,人员将车锁锁定,车锁被锁定后向控制器传递已锁信号,控制器接收已锁信号后控制单车夹持组件将共享单车的前车轮和车架固定,再由提升组件带动单车夹持组件和共享单车运动至所需高度,由单车夹持组件将车把手挂接于存放架上,便可将共享单车固定;人员需要使用共享单车时,将车锁解锁,便可将共享单车推走;通过设定车锁接收允许锁定信号后才可锁定,可减少人员将共享单车随意停放,减少共享单车占用道路面积。
20.可选的,还包括充电池,所述充电池与所述车架螺纹连接,所述充电池用于对共享
单车供电。
21.通过采用上述技术方案,当共享单车为共享电动自行车时,充电池对电动自行车供电,更换充电池时,将充电池从车架上旋转拧出,并对充电池单独充电,再将已充电的充电池安装至车架上;通过设置充电池与车架螺纹连接,便于对充电池进行更换。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.1.通过设置控制组件可减少人员将共享单车随意停放,减少共享单车对道路的占地面积;
24.2.通过设置充电装置可对类型为共享电动自行车的共享单车进行更换充电池;
25.3.通过设定污损车辆存取步骤,可将污损车辆放入存车罩内,减少污损车辆对车位的占用。
附图说明
26.图1是本技术共享单车的实施例1的整体结构示意图,旨在表示套筒和轮轴的爆炸结构;
27.图2是本技术共享单车的实施例2的整体结构示意图,旨在表充电池和电池座的结构;
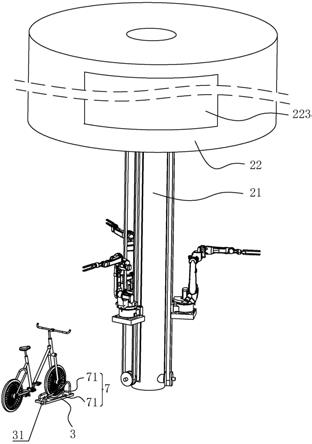
28.图3是本技术共享单车车库的实施例1整体结构示意图;
29.图4是本技术共享单车车库的实施例1中存放组件结构示意图;
30.图5是本技术共享单车车库的实施例1中提升组件和单车夹持组件的结构示意图;
31.图6是本技术共享单车车库的实施例1中夹持杆和定位槽的结构示意图;
32.图7是本技术共享单车车库的实施例1中充电装置结构示意图;
33.图8是本技术共享单车车库的实施例2中提升组件结构示意图;
34.图9是本技术共享单车车库的实施例3中转动驱动组件结构示意图;
35.附图标记说明:11、车架;12、车把手;13、前叉;14、后叉;15、车轮;151、轮轴;1511、套筒;152、轮圈;153、辐条;16、车锁;17、电池座;18、充电池;2、存放组件;21、立柱;211、导向槽;22、存车罩;221、避让孔;222、过料通道;223、显示屏;224、通孔;23、存放架;231、连接杆;232、支撑杆;2321、卡槽;233、挂钩;3、停放架;31、限位槽;4、提升组件;41、第一支撑座;42、第一电机;43、同步轮;44、同步带;45、导向块;46、导向台;47、承载滑台;5、单车夹持组件;51、夹手驱动件;52、机械夹爪;53、夹持杆;531、定位槽;6、充电装置;61、转动驱动组件;611、第二支撑座;612、第二电机;613、齿轮;614、内齿环;615、第三支撑座;616、第一气缸;617、第二气缸;618、齿条;619、外齿环;62、转动环;621、安装孔;63、充电座;64、电池夹持件;641、第一六轴机器人;642、机械夹手;7、控制组件;71、第一传感器71;72、第二传感器72。
具体实施方式
36.以下结合附图1
‑
9对本技术作进一步详细说明。
37.本技术实施例公开一种共享单车。
38.实施例1
39.参照图1,共享单车为共享自行车,共享单车包括车架11、车把手12、前叉13、后叉
14、两个车轮15和一个车锁16;车把手12与车架11转动连接,前叉13与车把手12焊接,后叉14与车架11焊接,任一车轮15与前叉13转动连接,另一车轮15与后叉14转动连接;车轮15包括轮轴151、轮圈152和多个辐条153,一个车轮15中的轮轴151与前叉13转动连接、另一车轮15中的轮轴151与后叉14转动连接,两个轮轴151平行设置,且每一轮轴151的转动轴线与车把手12的转动轴线垂直,轮圈152同轴设于轮轴151外,辐条153一端与轮圈152焊接另一端与轮轴151焊接;每一轮轴151两端各焊接一个套筒1511;车锁16与车架11通过螺丝固定连接,车锁16用于接收允许车锁16被锁定的允许锁定信号,车锁16用于传递车锁16已被锁定的已锁信号。
40.实施例1的实施原理为:使用时,用户推动车把手12,车轮15在向前转动的过程中车辆向前移动;将共享单车停放时,需要将车锁16锁定,而将车锁16锁定前首先由车锁16接收允许锁定信号,之后用户才可将车锁16锁定,再由车锁16传递车锁16已被锁定的已锁信号;取车时,将车锁16打开,便可将共享单车推走。
41.实施例2
42.参照图2,本实施例与实施例1的不同之处在于,共享单车为共享电动自行车,共享单车还包括电池座17和充电池18,电池座17与车架11通过螺丝固定连接,充电池18与电池座17螺纹连接,充电池18与电池座17之间形成电流通路后为共享单车的行驶提供电能。
43.实施例2的实施原理为:更换充电池18时,将充电池18从电池座17中旋转拧出,再将电量充足的充电池18旋转拧入电池座17中。
44.本技术实施例还公开一种共享单车车库。
45.实施例1
46.参照图3和图4,共享单车车库包括存放组件2、多个停放架3、3个提升组件4、3个单车夹持组件5、一个充电装置6和一个控制组件,提升组件4和单车夹持组件5一一对应设置,三个提升组件4沿立柱21周向均匀分布。
47.参照图3和图4,存放组件2包括立柱21、存车罩22和多个存放架23;立柱21呈轴线竖直设置的圆柱形,存车罩22为中空的圆柱状,存车罩22同轴焊接于立柱21外壁,存车罩22底壁高于立柱21底壁,存车罩22底壁同轴开设有避让孔221,避让孔221内壁与立柱21外壁之间形成过料通道222;存车罩22外壁通过螺丝固定连接有显示屏223;存放架23通过螺丝固定连接于存车罩22内壁。
48.参照图3和图4,存放架23包括连接杆231、支撑杆232和两个挂钩233;连接杆231水平设置,连接杆231与存车罩22内壁贴合且与存车罩22内壁通过螺丝固定连接,支撑杆232水平设置且沿存车罩22的直径方向设置,支撑杆232与连接杆231焊接,支撑杆232远离连接杆231的一端开设有卡槽2321,卡槽2321用于供共享单车的车架11嵌入;挂钩233焊接于连接杆231顶壁,且挂钩233高于卡槽2321设置,一个挂钩233一一对应的设于支撑杆232长度方向的一侧,挂钩233用于供共享单车的车把手12嵌入。
49.参照图3,停放架3设于立柱21侧方,停放架3与地面通过膨胀螺丝固定连接,停放架3上开设有供共享单车的前车轮15嵌入的限位槽31。
50.参照图4和图5,提升组件4包括第一支撑座41、第一电机42、两个同步轮43、一个同步带44和一个导向块45;第一支撑座41与立柱21侧壁通过螺丝固定连接,第一电机42为伺服电机,第一电机42的机壳与第一支撑座41通过螺丝固定连接,第一电机42的输出轴与任
一同步轮43通过键连接的方式同轴固定连接;两个同步轮43沿竖直方向分布于立柱21侧壁,且同步轮43与立柱21转动连接,同步带44绕接于两个同步轮43之间;导向块45与同步带44通过螺丝固定连接,立柱21侧壁沿竖直方向开设有3条导向槽211,导向槽211与导向块45一一对应设置,本实施例中导向块45为t型块,导向槽211为t型槽,导向块45沿竖直方向滑动连接于导向槽211内。
51.参照图5和图6,单车夹持组件5包括夹手驱动件51、机械夹爪52和两个夹持杆53;本实施例中夹手驱动件51为六轴机器人,在其他实施例中夹手驱动件51也可以为五轴机器人,夹手驱动件51一轴处的底座与导向块45通过螺丝固定连接,夹手驱动件51六轴处的腕臂与机械夹爪52连接;机械夹爪52包括驱动端和两个夹持端,驱动端与夹手驱动件51六轴处的腕臂通过螺丝固定连接,驱动端带动两个夹持端沿相反方向运动,夹持杆53和夹持端一一对应的用螺丝固定连接,夹持杆53侧壁开设有供前车轮15的套筒1511嵌入的定位槽531,两个夹持杆53将共享单车夹持时,套筒1511嵌入嵌槽内,夹持杆53远离机械夹爪52的一端延伸至车架11处并将车架11夹持,可减少车轮15与车架11发生晃动。
52.参照图7,充电装置6包括转动驱动组件61、转动环62、多个充电座63以及3个电池夹持件64;本实施例中,转动驱动组件61包括第二支撑座611、第二电机612、齿轮613和内齿环614,第二支撑座611与存车罩22内壁焊接,第二电机612为伺服电机,第二电机612的机壳与第二支撑座611通过螺丝固定连接,第二电机612输出轴与齿轮613通过键连接的方式同轴固定连接,齿轮613与内齿环614内齿啮合,内齿环614同轴转动连接于存车罩22内壁。转动环62同轴焊接于内齿环614顶壁;转动环62内壁开设有多个安装孔621,多个安装孔621沿转动环62周向均匀间隔分布,一个充电座63与一个安装孔621一一对应设置,充电座63用于充电,充电座63通过螺丝固定连接于安装孔621内,充电池18螺纹连接于充电座63内,充电池18与充电座63之间形成电流通路,部分充电座63内螺纹连接有用于替换的充电池18。
53.参照图7,电池夹持件64包括第一六轴机器人641和机械夹手642,第一六轴机器人641的一轴底座与立柱21通过螺丝固定连接,机械夹手642与第一六轴机器人641的六轴腕臂通过螺丝固定连接;在其他实施例中,电池夹持件64可以包括第一五轴机器人和夹爪气缸,第一五轴机器人的一轴底座与立柱21通过螺丝固定连接,第一五轴机器人的五轴腕臂与夹爪气缸的缸体通过螺丝固定连接。
54.控制组件包括:第一传感器71、第二传感器72和控制器,第一传感器71通过螺丝与停车架固定连接,第一传感器71为压力传感器,第二传感器72为光电传感器;第一传感器71检测共享车的到位信号并传递给控制器,控制器向车锁传递允许锁定信号并接收车锁的已锁信号,第二传感器72向控制器传递共享车的类型信号。
55.实施例1的实施原理为:停车时,人员将共享单车的前车轮15放入停放架3上的限位槽31内,第一传感器71检测到共享单车的到位信号后,将到位信号传递给控制器,控制器向车锁16传递允许锁定信号,车锁16接收到允许锁定信号后才可被用户锁定,用户将车锁16锁定后,车锁16向控制器传递已锁信号,控制器控制提升组件4和单车夹持组件5作业,将共享单车从停放架3输送至存放架23上。
56.输送时,首先由提升组件4带动单车夹持组件5向下运动,驱动时,第一电机42带动与第一电机42连接同步轮43转动,同步轮43转动时带动同步带44传动,同步带44再带动另一个同步轮43转动,同步轮43在传动的过程中带动导向块45运动,导向块45运动时便可带
动夹手驱动件51运动,夹手驱动件51带动单车夹持组件5整体运动。
57.单车夹持组件5运动至共享单车处时,夹手驱动件51带动带动机械夹爪52运动至所需位置,再由机械夹爪52带动两个夹持杆53运动,将两个夹持杆53分别驱动至共享单车两侧时,机械夹爪52带动两个夹持杆53朝向相互靠近的一侧运动,从而将套筒1511嵌入定位槽531内,且夹持杆53远离机械夹手的一端将共享单车的车架11夹持,从而便可将共享单车固定。将共享单车夹持后,提升组件4驱动单车夹持组件5和共享单车向上运动。
58.若共享单车为共享自行车,则提升组件4带动夹手驱动件51运动至挂车所需高度,由机械夹爪52将共享单车驱动至存放架23上,并使得共享单车的车把手12挂接于挂钩233上,共享单车的车架11嵌入卡槽2321内,从而便可将共享单车固定。
59.若共享单车为共享电动自行车,则提升组件4带动夹手驱动件51运动至充电装置6的高度处后停止驱动,此时,第一六轴机器人641带动机械夹手642运动至共享单车处,由机械夹手642将充电池18夹持,再由第一六轴机器人641带动机械夹手642运动,以将充电池18和充电座63分离,再带动机械夹手642和充电池18运动至充电座63处,将充电池18拧入充电座63内,从而对充电池18进行充电,再由机械夹手642将充电座63内充好电的充电池18取出并拧入共享单车的车架11上,便可实现充电池18的更换,将充电池18更换完成后,提升组件4带动共享单车继续向上运动,并由单车夹持组件5将共享单车挂接于存放架23上。
60.实施例2
61.参照图8,本实施例与实施例1的不同之处在于提升组件4不同,本实施例中提升组件4为直线电机,提升组件4包括导向台46和承载滑台47,导向台46沿竖直方向设置,导向台46与立柱21通过螺丝固定连接,承载滑台47沿竖直方向与导向台46滑动连接,夹手驱动件51的一轴底座与承载滑台47通过螺丝固定连接。
62.实施例2的实施原理为:提升组件4带动单车夹持组件5运动时,承载滑台47沿导向台46向上运动,承载滑台47带动夹手驱动件51运动,从而带动单车夹持组件5整体运动。
63.实施例3
64.参照图9,本实施例与实施例1的不同之处在于,转动驱动组件61不同:转动驱动组件61包括第三支撑座615、第一气缸616、第二气缸617、齿条618和外齿环619;第三支撑座615焊接于存车罩22外壁,第一气缸616的缸体通过螺丝与第三支撑座615固定连接,第二气缸617的缸体与第一气缸616的活塞杆通过螺丝固定连接,第一气缸616的驱动方向与外齿环619的直径重合,第二气缸617的驱动方向水平设置且与第一气缸616的驱动方向垂直,齿条618与第二气缸617的活塞杆通过螺丝固定连接,齿条618沿第二气缸617的驱动方向设置,外齿环619与存车罩22内壁同轴转动连接,存车罩22侧壁开设有通孔224,外齿轮613的部分外齿穿过通孔224后与齿条618啮合;转动环62同轴焊接于外齿环619顶壁。
65.实施例3的实施原理为:作业时,第一气缸616驱动第二气缸617和齿条618朝向外齿环619一侧运动,再由第二气缸617带动齿条618运动,从而便可推动外齿环619转动一定角度,再由第一气缸616带动第二气缸617和齿条618朝向远离外齿环619的一侧运动,从而将齿条618与外齿环619分离,再由第二气缸617带动齿条618运动至原位,最后重复上述作业过程,便可带动外齿环619间歇性转动。
66.本技术实施例还公开一种共享单车存取控制方法。
67.共享单车存取控制方法包括以下步骤:存车控制方法、取车控制方法和污损车辆
存取步骤。
68.存车控制方法包括以下步骤:
69.s11:第一传感器71检测共享单车是否到位的就位信号并传递给控制器;同时,第二传感器72检测共享单车的类型信号;
70.使用时,用户先将共享单车推放至停放架3上,第一传感器71检测共享单车的就位信号,并将就位信号传递给控制器;同时,第二传感器72检测共享单车的类型信号,并将共享单车为共享自行车或共享单车为共享电动自行车的类型信号传递给控制器。
71.s12:控制器根据共享单车的到位信号,向共享单车的车锁16传递允许锁定信号;
72.控制器接收到共享单车的就位信号后进行判别,若就位信号为到位信号,则控制器向车锁16传递允许锁定信号,若就位信号为空位信号,则由控制器将空位信号记忆并存储。
73.s13:控制器接收共享单车的已锁信号;
74.控制器向车锁16传递允许锁定信号后,人员将车锁16关闭,车锁16关闭后,人员便可离开,之后由车锁16向控制器传递已锁信号,再由控制器接收已锁信号。
75.s14:控制器控制单车夹持组件5和提升组件4作业,将共享单车从停放架3转移至存放架23;转移的过程中,控制器判断接收到的类型信号,若共享单车的类型为共享自行车,则控制器将共享单车直接从停放架3转移至存放架23,若共享单车的类型为共享电动自行车,则转移共享单车的过程中,控制器控制充电装置6对共享单车的充电池18进行更换,更换完成后,控制器控制提升组件4和单车夹持组件5继续将共享单车放置于存放架23上。
76.取车控制方法包括以下步骤:
77.s21:控制器接收n个第一传感器71的就位信号,判断空车位的数量与位置,其中n是大于1的正整数。
78.s22:设定空车位数量的最高值和最低值,本实施例中设定空车位数量的最高值为9、最低值为3;
79.空车位数量的最高值和最低值也可在不同时间段做调整:
80.在存车高峰期,调高最低值,本实施例中最高值为9、最低值调高为7;
81.在取车高峰期,调低最高值,本实施例中最低值为3、最高值调低为5。
82.s23:控制器根据空车位的数量判断取车或存车;
83.s24:当空车位的数量小于最低值时,控制器控制单车夹持组件5和提升组件4作业,将共享单车从停放架3转移至存放架23上,空出车位,便于用户存放车辆;当空车位的数量大于最高值时,控制器控制单车夹持组件5和提升组件4作业,将共享单车从存放架23转移至停放架3上,将共享单车补足,便于用户提取共享单车。
84.污损车辆存取步骤:
85.s31:在一定时间范围内,第一传感器71检测共享单车是否到位的就位信号,并传递给控制器,检测周期可根据不同时间段调整,早上6点至晚上12点的之间的检测周期减小为半小时,零点至早上6点的检测周期为5小时。
86.s32:控制器计算每一车位的空车位次数和到位信号之间的信号变换次数,并对多个车位的信号变换次数进行对比。
87.s33:设定多个空车位的信号变换次数的平均值为x,并设定临界值y,y为小于x且
大于零的数值。
88.当任一车位的信号变换次数低于临界值y时,判定该车位的共享单车为污损车辆;
89.s34:控制器控制单车夹持组件5和提升组件4作业,将共享单车从存放架23转移至停放架3上,并且控制器将2污损车辆的存储位置记忆。
90.s35:工作人员间隔一定时间后,向控制器输入提车信号,控制器控制提升组件4和单车夹持组件64作业,以污损车辆的存储位置为依据,将污损车辆从存放架23转移至停放架3,工作人员再将污损车辆取走即可。
91.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1