适用于陡峭边坡施工作业的自行走式操作平台的制作方法
1.本发明专利涉及陡峭边坡施工的技术领域,具体而言,涉及适用于陡峭边坡施工作业的自行走式操作平台。
背景技术:
2.在边坡加固等施工过程中,往往需要在边坡的坡面上进行钻孔,形成边坡孔位,进而在边坡孔位中嵌入对应的加固结构等。
3.现有技术中,一般都是通过在边坡上搭建脚手架,脚手架沿着边坡的坡面搭建,然后,工人在脚手架上,利用钻机在边坡的坡面上钻孔,但是,搭建脚手架的时间过长,且由于钻机的尺寸以及重量较大,工人在脚手架上钻孔操作非常不便,导致施工工期大大延长,且成本高,施工难度大。
技术实现要素:
4.本发明的目的在于提供适用于陡峭边坡施工作业的自行走式操作平台,旨在解决现有技术中,通过在边坡搭建脚手架进行钻孔施工,存在施工工期长的问题。
5.本发明是这样实现的,适用于陡峭边坡施工作业的自行走式操作平台,包括放置在坡脚且沿着坡脚的长度方向移动的行走架,所述行走架上设有纵向升降的升降架,所述升降架上设有支撑钻机的支撑台;所述行走架具有朝向边坡的向坡侧以及背离边坡的背坡侧,所述背坡侧设有可伸缩且摆动的反向支撑臂;
6.当所述钻机在支撑台上对边坡进行钻孔时,所述反向支撑臂自上而下抵接在地面上,平衡钻机钻孔时的反向作用力;当所述反向支撑臂脱离与地面的抵接后,所述反向支撑臂通过收缩以及摆动,收纳在行走架中。
7.进一步的,所述行走架包括呈水平布置的底部架,所述升降架设置在底部架上;所述底部架的底部设有两个相对于底部架水平移动的移动架,所述移动架上设有多个朝下延伸且可上下伸缩的支撑脚;
8.通过驱动两个移动架沿着坡脚的长度方向交替移动设定距离,同时驱动升降架以及支撑台沿着坡脚的长度方向移动设定距离,实现所述适用于陡峭边坡施工作业的自行走式操作平台沿着坡脚的长度方向移动;
9.当所述移动架处于移动过程中,所述移动架上的支撑脚朝上收缩与地面脱离抵接,当所述移动架停止移动需要支撑时,所述移动架上的支撑脚朝下伸出与地面抵接。
10.进一步的,所述移动架的端部与底部架之间设有水平布置且伸缩的液压杆,当所述移动架的支撑脚朝上收缩与地面脱离抵接后,所述液压杆驱动移动架相对于底部架移动设定距离;当所述移动架的支撑脚朝下伸出抵接在地面上后,所述液压杆驱动升降架以及支撑体台相对于底部架移动设定距离。
11.进一步的,所述移动架包括两个并行布置的移动条,所述底部架的底部设有供导向移动条移动的轨槽,所述移动条活动嵌入在轨槽中,所述移动条设有多个所述支撑脚,多
个所述支撑脚沿着移动条的长度方向间隔布置。
12.进一步的,所述升降架包括多个纵向布置且上下伸缩的升降轴,所述升降轴的底部固定连接在行走架上,所述升降轴的顶部与支撑台固定连接;
13.相邻的所述升降轴上连接有两个剪刀杆,所述剪刀杆的端部分别与两个升降轴铰接,两个所述剪刀杆之间呈交叉布置,且两个所述剪刀杆的中部刚性连接。
14.进一步的,所述支撑台上设有顶部开口的槽道,所述槽道沿着朝向边坡的坡面延伸布置,所述槽道中设有在槽道中移动的移动板,所述移动板的底部活动嵌入在槽道中,所述移动板的顶部延伸出槽道的顶部开口,形成用于放置钻机的放置部;
15.所述移动板的端部与槽道的端部之间具有弹性间隔,所述弹性间隔中填充有处于压缩状态的弹性块;两个所述弹性块包括朝向边坡的内端弹性块以及背离边坡的外端弹性块,所述外端弹性块的初始压缩量小于内端弹性块的初始压缩量。
16.进一步的,所述放置部的中部具有朝下凹陷且用于放置钻机的放置槽;所述槽道的中部朝向凹陷,形成减振槽,所述减振槽位于放置槽的正下方,所述移动板的底部减振部,所述减振部位于移动板的底部的中部,所述减振部位于放置槽的正下方,所述减振部位于减振槽的上方,与减振槽之间分离布置;
17.所述减振部上连接有多个上下弹性变形的弹性带,多个所述弹性带沿着减振部的周向间隔布置,所述弹性带的底部连接有配重块,所述配重块与减振槽的底部之间具有间隔。
18.进一步的,所述放置槽呈上大下小的圆锥筒状,所述放置槽的内侧壁上设有多个水平布置的支撑台阶,所述支撑台阶环绕放置槽的周向布置,沿着放置槽的深度方向,多个所述支撑台阶依序间隔布置;
19.所述支撑台阶上覆盖有弹性层,所述钻机的底部的外周自上而下抵接在弹性层上,所述钻机的底部的中部呈悬空状。
20.进一步的,所述反向支撑臂包括朝向或背离行走架摆动的摆动臂以及上下伸缩的伸缩臂,所述摆动臂的内端与行走架铰接,所述伸缩臂的上端与摆动架的外端连接,所述伸缩臂的下端设有抵压块;
21.当所述反向支撑臂处于支撑状态时,所述摆动臂背离行走架摆动至水平状后,所述伸缩臂朝下纵向伸出,所述抵压块抵压在地面上;当所述反向支撑臂处于收纳状态时,所述伸缩臂朝上纵向收缩,所述抵压块与地面脱离抵压,所述摆动臂朝向行走架摆动,收纳在行走架中。
22.进一步的,所述抵压块呈平板状,所述抵压块中穿设有多个冲击轴,多个所述冲击轴沿着抵压块的周向间隔布置;所述冲击轴的上端自上而下穿过抵压块,显露在抵压块的上方,所述冲击轴的下端穿设在抵压块中,且高于抵压块的底部布置;
23.所述抵压块上连接有冲击电机,所述冲击电机与冲击轴的上端连接,当所述钻机在支撑台上对边坡进行钻孔的过程中,所述冲击电机按照钻机的钻进频率,驱动冲击轴上下往返移动,以使冲击轴的下端穿过抵压块的底部,按照冲击频率冲击地面,所述冲击频率滞后于钻进频率。
24.与现有技术相比,本发明提供的适用于陡峭边坡施工作业的自行走式操作平台,放置在边坡的坡脚,行走架可以沿着坡脚移动,升降架可以上下升降,从而带动支撑台上的
钻机上下移动以及沿着坡脚移动,可以实现钻机沿着边坡的横向以及纵向进行钻孔操作,不需要搭建脚手架,施工效率大大提高,且施工方便;其次,通过设置反向支撑臂,可以反向平衡钻机钻进时的反向作用力,使得整个自行走式操作平台处于平衡状态,更便于施工。
附图说明
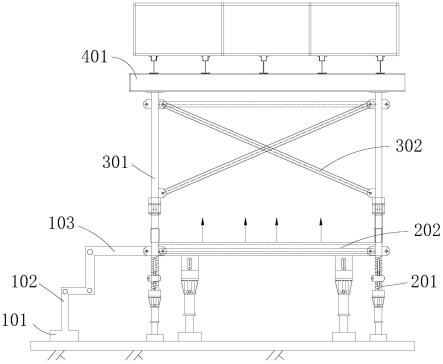
25.图1是本发明提供的适用于陡峭边坡施工作业的自行走式操作平台的主视示意图;
26.图2是本发明提供的行走架的主视示意图;
27.图3是本发明提供的支撑台与移动板之间配合的主视示意图;
28.图4是本发明提供的抵压块与冲击轴配合的主视示意图;
29.图5是图3中的a处放大示意图。
具体实施方式
30.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
31.以下结合具体实施例对本发明的实现进行详细的描述。
32.本实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
33.参照图1-5所示,为本发明提供的较佳实施例。
34.适用于陡峭边坡施工作业的自行走式操作平台,适用于陡坡的钻工施工。
35.适用于陡峭边坡施工作业的自行走式操作平台,包括行走架,行走架放置在坡脚且沿着坡脚的长度方向移动。行走架上设有纵向升降的升降架,升降架上设有支撑钻机的支撑台401;行走架具有朝向边坡的向坡侧以及背离边坡的背坡侧,背坡侧设有可伸缩且摆动的反向支撑臂。
36.当钻机在支撑台401上对边坡进行钻孔时,反向支撑臂自上而下抵接在地面上,平衡钻机钻孔时的反向作用力;当反向支撑臂脱离与地面的抵接后,反向支撑臂通过收缩以及摆动,收纳在行走架中。
37.上述提供的适用于陡峭边坡施工作业的自行走式操作平台,放置在边坡的坡脚,行走架可以沿着坡脚移动,升降架可以上下升降,从而带动支撑台401上的钻机上下移动以及沿着坡脚移动,可以实现钻机沿着边坡的横向以及纵向进行钻孔操作,不需要搭建脚手架,施工效率大大提高,且施工方便;其次,通过设置反向支撑臂,可以反向平衡钻机钻进时的反向作用力,使得整个自行走式操作平台处于平衡状态,更便于施工。
38.本实施例中,行走架包括呈水平布置的底部架202,升降架设置在底部架202上;底部架202的底部设有两个相对于底部架202水平移动的移动架,移动架上设有多个朝下延伸
且可上下伸缩的支撑脚201。通过驱动两个移动架沿着坡脚的长度方向交替移动设定距离,同时驱动升降架以及支撑台401沿着坡脚的长度方向移动设定距离,实现自行走式操作平台沿着坡脚的长度方向移动。
39.当移动架处于移动过程中,移动架上的支撑脚201朝上收缩与地面脱离抵接,当移动架停止移动需要支撑时,移动架上的支撑脚201朝下伸出与地面抵接。
40.当自行走式操作平台需要沿着坡脚移动时,依靠行走架的移动来实现,两个移动架依序交替朝前移动,同时配合支撑脚201朝上或朝下移动,实现行走架的移动,升降架以及支撑台401配合行走架同步移动,实现整个自行走式操作平台的移动。
41.当然,当行走架移动后,可以通过外部的驱动结构来驱动升降架以及支撑台401的同步移动,也可以通过人工推动等等,具体可视实际需要而定。
42.本实施例中,移动架的端部与底部架202之间设有水平布置且伸缩的液压杆,当移动架的支撑脚201朝上收缩与地面脱离抵接后,液压杆驱动移动架相对于底部架202移动设定距离;当移动架的支撑脚201朝下伸出抵接在地面上后,液压杆驱动升降架以及支撑体台相对于底部架202移动设定距离。
43.当支撑脚201脱离与地面的抵接后,液压杆则可以推动移动架相对于底部架202移动,当支撑脚201抵接在地面后,此时,移动架处于支撑状态,其固定不动,通过液压杆来推动底部架202相对于移动架的移动,当然,升降架以及支撑台401也随着底部架202的移动而移动。
44.作为优选实施例,移动架包括两个并行布置的移动条203,底部架202的底部设有供导向移动条203移动的轨槽,移动条203活动嵌入在轨槽中,移动条203设有多个支撑脚201,多个支撑脚201沿着移动条203的长度方向间隔布置。
45.支撑脚201具有轴向伸缩作用,这样,当边坡的坡脚存在不平整的情况下,移动条203上的各个支撑脚201可以根据实际支撑情况,进行轴向伸缩,以保证整个操作平台处于平稳的状态。
46.本实施例中,升降架包括多个纵向布置且上下伸缩的升降轴301,升降轴301的底部固定连接在行走架上,升降轴301的顶部与支撑台401固定连接;相邻的升降轴301上连接有两个剪刀杆302,剪刀杆302的端部分别与两个升降轴301铰接,两个剪刀杆302之间呈交叉布置,且两个剪刀杆302的中部刚性连接。
47.通过设置剪刀杆302,可以使得相邻的升降轴301之间的一致性,且大大提高升降轴301的支撑强度,也便于升降轴301的同步升降。
48.支撑台401上设有顶部开口的槽道,槽道沿着朝向边坡的坡面延伸布置,槽道中设有在槽道中移动的移动板500,移动板500的底部活动嵌入在槽道中,移动板500的顶部延伸出槽道的顶部开口,形成用于放置钻机的放置部;
49.移动板500的端部与槽道的端部之间具有弹性间隔,弹性间隔中填充有处于压缩状态的弹性块;两个弹性块包括朝向边坡的内端弹性块602以及背离边坡的外端弹性块601,外端弹性块601的初始压缩量小于内端弹性块602的初始压缩量。
50.钻机在钻进的过程中,也会受到背离边坡的反向作用力,为了进一步减少其对整个自行走式操作平台的反向作用,将移动板500设置为活动时,钻机放置在移动板500上,当钻机受到反向作用力后,移动板500朝外作用,对外端弹性块601进行进一步压缩,外端弹性
块601起到缓冲的作用,且反向作用力消失后,在外端弹性块601的作用下,移动板500复位。
51.钻机在钻进的过程中,外端弹性块601承受更大的压缩弹性变形,且为了提高外端弹性块601的弹性减振作用,外端弹性块601的初始压缩量小于内端弹性块602的初始压缩量,这样,外端弹性块601可压缩的程度大于内端弹性块602,钻机在钻进的过程中,也可限制移动板500朝内移动的幅度,避免钻机钻进过程中,影响钻机在边坡上的定位钻孔操作。
52.本实施例中,放置部的中部具有朝下凹陷且用于放置钻机的放置槽501;槽道的中部朝向凹陷,形成减振槽,减振槽位于放置槽501的正下方,移动板500的底部减振部,减振部位于移动板500的底部的中部,减振部位于放置槽501的正下方,减振部位于减振槽的上方,与减振槽之间分离布置。
53.减振部上连接有多个上下弹性变形的弹性带502,多个弹性带502沿着减振部的周向间隔布置,弹性带502的底部连接有配重块503,配重块503与减振槽的底部之间具有间隔。
54.钻机在钻进的过程中,除了水平的反向作用力之外,其还有振动,也就是上下振动,此时,钻机的振动传递至移动板500的放置槽501以及减振部,由于减振部与减振槽之间分离布置,可以起到空间减振的效果,减少振动传递至支撑台401上。
55.其次,当减振部协同钻机朝下或朝上瞬间移动,形成振动的过程中,弹性带502受到短时间的抽拉等,配重块503的瞬间移动滞后于弹性带502的移动,这样,通过配重块503可以对移动板500的振动起到缓冲的作用。
56.本实施例中,放置槽501呈上大下小的圆锥筒状,放置槽501的内侧壁上设有多个水平布置的支撑台阶504,支撑台阶504环绕放置槽501的周向布置,沿着放置槽501的深度方向,多个支撑台阶504依序间隔布置。
57.支撑台阶504上覆盖有弹性层,钻机的底部的外周自上而下抵接在弹性层上,钻机的底部的中部呈悬空状。这样,钻机的底部的中部处于悬空状,钻机在振动的过程中,通过悬空设置,以及支撑台阶504上的弹性层的缓冲作用,可以减少钻机传递给移动板500的振动。
58.本实施例中,反向支撑臂包括朝向或背离行走架摆动的摆动臂103以及上下伸缩的伸缩臂102,摆动臂103的内端与行走架铰接,伸缩臂102的上端与摆动架的外端连接,伸缩臂102的下端设有抵压块101。
59.当反向支撑臂处于支撑状态时,摆动臂103背离行走架摆动至水平状后,伸缩臂102朝下纵向伸出,抵压块101抵压在地面上;当反向支撑臂处于收纳状态时,伸缩臂102朝上纵向收缩,抵压块101与地面脱离抵压,摆动臂103朝向行走架摆动,收纳在行走架中。
60.当反向支撑臂不需要使用时,其可以收纳在行走架中,便于收纳。另外,当摆动臂103摆动至水平状后,为了保持其支撑稳固性,在行走架上设有有限位块,可以限制摆动臂103继续朝上摆动。
61.本实施例中,抵压块101呈平板状,抵压块101中穿设有多个冲击轴700,多个冲击轴700沿着抵压块101的周向间隔布置;冲击轴700的上端自上而下穿过抵压块101,显露在抵压块101的上方,冲击轴700的下端穿设在抵压块101中,且高于抵压块101的底部布置。
62.抵压块101上连接有冲击电机701,冲击电机701与冲击轴700的上端连接,当钻机在支撑台401上对边坡进行钻孔的过程中,冲击电机701按照钻机的钻进频率,驱动冲击轴
700上下往返移动,以使冲击轴700的下端穿过抵压块101的底部,按照冲击频率冲击地面,冲击频率滞后于钻进频率。
63.反向支撑臂的抵压块101抵接在地面上,钻机在钻进的过程中,反向支撑臂承受朝下的压力,并抵压在地面上,保持自行走式操作平台的平衡。通过设置冲击轴700,冲击电机701驱动冲击轴700上下移动,以冲击地面,可以缓冲施加在反向支撑臂上的压力,减轻反向支撑臂的压力,并且,冲击频率滞后于钻进频率,可以跟钻进频率之间错开,也就是说,冲击轴700对地面的冲击,滞后于钻机在钻进过程中,对边坡的冲击,这样,冲击轴700冲击地面提供更佳时机的反冲力,缓和反向支撑臂的压力。。
64.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1