一种基于图像识别和激光雷达数据融合的混凝土浇筑方法与流程
1.本发明涉及建筑行业的智能建造技术领域,具体为一种基于图像识别和激光雷达数据融合的混凝土浇筑方法。
背景技术:
2.目前,在公路桥梁、机场港口、房建结构等的建设中,大部分均采用混凝土浇筑施工方式,在当前施工建造过程中,混凝土的输送方式主要采用泵送的方式,即,将混凝土视为一种具有一定浓度的流体,依靠混凝土输送泵的柱塞推力和管道实现混凝土的运输。在输送管道的末端会连接混凝土布料机,该混凝土布料机接收被输送来的混凝土,然后在工人的协作下,将混凝土浇筑到钢筋网和模板之间的空隙中,从而形成相应的工程结构。
3.混凝土布料机主要分为手动型和自动型两种。手动型布料机的作业方式为在人力拉到绳索下绕回转支座旋转和两节臂架折叠移动,从而实现出料口移动到待浇筑区域浇筑混凝土。自动型布料机的作业方式为通过有线遥控的方式,并采用液压驱动,控制“z”字型折叠式臂架移动到待浇筑区域实现混凝土浇筑。
4.在混凝土布料机实施浇筑的最后环节,由施工人员手扶软管进行移动将泵输送来的混凝土浇筑到待浇筑区域中不同位置的模板里,同时根据经验预测浇筑量和目测实际浇筑量,并由施工人员进行人工平仓、刮杠刮平及振捣使得浇筑在模板内堆积的混凝土密实摊平,然后与布料机操作人员配合以到达布料机出料口移动到覆盖范围内的不同区域,从而完成布料机覆盖区域的浇筑任务,
5.但是传统混凝土浇筑主要依靠大量人工,配合混凝土布料机、混凝土输送泵等机械装置,整体技术相对比较落后,而且,混凝土浇筑主要由现场施工人员凭经验预测浇注量,施工过程中通过目测浇筑量,并把浇筑状态和下一步待浇筑区域反馈给布料机操作员,再由布料机操作员控制布料机的出口移动到对应区域,人工反馈的方式无法保持协同一致,布料机移动的时机会超前或滞后,从而出现混凝土溢出模板,导致混凝土的浪费;同时,也容易导致各区域计量不够精确及浇筑不均匀,因此,我们提出一种基于图像识别和激光雷达数据融合的混凝土浇筑方法。
技术实现要素:
6.本发明的目的在于提供一种基于图像识别和激光雷达数据融合的混凝土浇筑方法,解决了背景技术中所提出的问题。
7.为实现上述目的,本发明提供如下技术方案:一种基于图像识别和激光雷达数据融合的混凝土浇筑方法,其特征在于:包括如下方法步骤:
8.步骤一:获取结构化的待浇筑建筑结构的路径规划数据,根据方法进行浇筑路径规划,获取结构化的待浇筑建筑结构的规划数据;
9.步骤二:根据路径规划数据进行运动轨迹规划,根据步骤一中规划的浇筑信息需要进一步对布料机机械臂末端的运动进行轨迹规划,作为布料机布料口在浇筑过程中自动
化运动的前提条件。
10.步骤三:融合图像识别和激光雷达数据计算区域待浇筑量,首先会通过高清摄像头收集大量建筑工程中关于施工过程中墙、板、梁、柱等的图像,以及对应属性信息下的待浇筑区域、已浇筑区域、浇筑溢出等图像制作为带标签的数据集,然后将该数据集作为训练样本,通过深度学习算法,经过不断的训练将它们进行分类,从而提取各图像对应的特征信息,形成“先验知识库”,以待浇筑过程中使用。
11.本实施例中,根据步骤二中规划得到的运动轨迹数据,控制机械臂末端运动到对应的布料口浇筑施工点位,然后根据步骤一中获取的当前建筑点位的属性信息,即当前点位是墙、梁、柱、板等属性信息,该浇筑点位所要浇筑的区域信息以及浇筑量信息,并通过图象识别和激光雷达融合数据实时计算并判断当前点位所浇筑的区域的浇筑量;
12.步骤四:判断当前浇筑区域的浇筑完成情况及溢出与否,在出料口会安装流量计装置,用来测量当前区域的实际浇筑量。当机械臂末端出料口根据规划的轨迹运动到指定的点位后,出料口会持续输出来自于输送管道的混凝土到该点位对应的浇筑区域。根据步骤三中实时计算并更新当前区域所需的浇筑量,并与末端流量计统计的流量进行匹配,从而判断当前浇筑区域的完成情况。若判断当前区域的浇筑任务已完成,则根据步骤二中规划的运动轨迹,自动控制布料口运动到下一个浇筑点位,并重复步骤三过程。
13.根据步骤三中神经网络训练得到的结果,在持续的浇筑过程中,实时识别并判断当前浇筑区域的混凝土溢出情况;
14.步骤五:判断机械臂布料机当前施工位置下的施工区域的浇筑完成情况,根据步骤二、三、四过程完成机器当前施工位置下所覆盖的待浇筑区域的所有浇筑点位对应的浇筑区域后,然后通过高清摄像头和激光雷达扫描当前施工位置下的施工区域,并通过过程步骤三中的方法识别并判断是否存在有漏浇筑或者浇筑不达标的点位对应的区域。
15.作为本发明的一种优选实施方式,所述步骤一中的方法为《混凝土自动布料机械臂浇筑路径规划方法》,其结构化的数据包含墙、柱、梁、板等的属性信息,机械臂布料机的施工位置及施工区域信息,对应施工位置的建筑结构的浇筑施工点位、顺序、区域及浇筑量信息。
16.作为本发明的一种优选实施方式,所述步骤二中的运动轨迹为:基于建筑工程中混凝土浇筑的施工工艺要求,布料机机械臂末端在浇筑过程中,需要布料口保持在一定高度,并在平面内做直线运动。结合步骤一中规划的浇筑顺序和建筑工程中混凝土浇筑的施工工艺要求,对于规划的路径,运用带有抛物线过渡的线性函数方法进行布料机机械臂末端笛卡尔空间直线运动轨迹规划,以保证布料口在浇筑过程中能够平稳在待浇筑区域上作直线运动,进而确保混凝土能够精确的浇筑到待浇筑区域,通过机械臂末端在笛卡尔空间直线运动轨迹规划,得到布料机机械臂末端在笛卡尔空间的直线运动轨迹,然后运用机械臂逆运动学求解方法,将笛卡尔空间的直线运动轨迹映射为关节空间中每个关节的运动轨迹。然后通过控制系统,控制每个关节按同一周期运动到对应的角度,从而保证布料机机械臂末端在笛卡尔空间作直线运动,实现全自动化控制浇筑。
17.作为本发明的一种优选实施方式,所述步骤三中的混凝土浇筑量式中,n为激光雷达扫描到的形成堆积为圆锥体或近似圆锥体形状的个数,一般情况下,根据建筑工程中钢筋模板结构和水泥混凝土的特性,产生堆积所形成的形状为波浪形的圆锥体,若产生其他
不规则图形作圆锥体近似处理,并在后期的浇筑过程中实时计算与修正,从而保证计算的准确性。同时,在浇筑过程中,会偶尔加入人工振捣,振平堆积的混凝土。
18.作为本发明的一种优选实施方式,所述步骤四中若在浇筑过程中,出现混凝土溢出,则适当修正出料口的位置,让其能够准确将混凝土浇筑到待浇筑区域内;若当前浇筑任务完成后出现混凝土溢出,则停止混凝土输送泵,并根据步骤二中规划的运动轨迹,控制布料口运动到下一个浇筑点位,并重复步骤三过程。
19.作为本发明的一种优选实施方式,所述步骤五中若存在漏浇筑或者浇筑不达标的点位对应的区域则自动规划当前点位到该点的运动轨迹,自动控制出料口到达指定位置,并完成浇筑任务。反复确认当前施工位置下的施工区域的浇筑完成情况,直到该区域所有的浇筑均完成且达标,则移动机器到下一个施工位置,重复以上所有过程。
20.与现有技术相比,本发明的有益效果如下:
21.本发明通过基于图像识别和激光雷达数据融合的混凝土自动浇筑计量方法,实现自动布料机机械臂浇筑范围内的自动浇筑,以方便的实现建筑工程中板面、墙体、梁、柱体等各种复杂结构的混凝土浇筑作业,达到精准计算各浇筑结构的浇筑用量,使混凝土堆积更均匀,并且不会溢出模板的目的,同时无需人工现场操作和监控反馈,根据规划的路径数据和由图像识别及激光雷达数据融合计算,实现全自动浇筑施工。有效降低人工成本,提高施工质量和效率。
附图说明
22.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
23.图1:总体结构施工图;
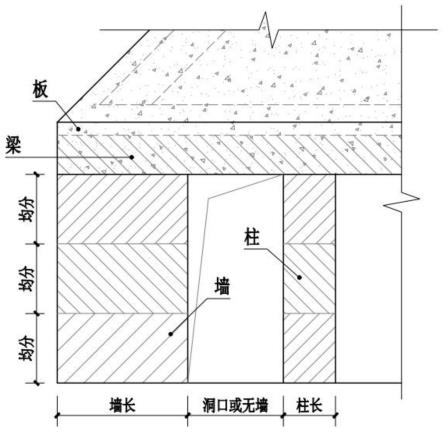
24.图2:板面、墙体、梁、柱体浇筑结构图;
25.图3:机械结构及关系图;
26.图4:混凝土浇筑形状示意图;
27.图5:图像识别和激光雷达融合数据计算浇筑量流程图;
28.图6:基于图像识别和激光雷达数据融合的混凝土自动浇筑方法流程图。
具体实施方式
29.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
30.请参阅图1,本发明提供一种技术方案:一种基于图像识别和激光雷达数据融合的混凝土浇筑方法,包括如下方法步骤:步骤一:获取结构化的待浇筑建筑结构的路径规划数据,根据方法进行浇筑路径规划,获取结构化的待浇筑建筑结构的规划数据;步骤二:根据路径规划数据进行运动轨迹规划,根据步骤一中规划的浇筑信息需要进一步对布料机机械臂末端的运动进行轨迹规划,作为布料机布料口在浇筑过程中自动化运动的前提条件,步骤三:融合图像识别和激光雷达数据计算区域待浇筑量,首先会通过高清摄像头收集大量建筑工程中关于施工过程中墙、板、梁、柱等的图像,以及对应属性信息下的待浇筑区域、已浇筑区域、浇筑溢出等图像制作为带标签的数据集,然后将该数据集作为训练样本,通过深
度学习算法,经过不断的训练将它们进行分类,从而提取各图像对应的特征信息,形成“先验知识库”,以待浇筑过程中使用,根据步骤二中规划得到的运动轨迹数据,控制机械臂末端运动到对应的布料口浇筑施工点位,然后根据步骤一中获取的当前建筑点位的属性信息,即当前点位是墙、梁、柱、板等属性信息,该浇筑点位所要浇筑的区域信息以及浇筑量信息,并通过图象识别和激光雷达融合数据实时计算并判断当前点位所浇筑的区域的浇筑量,步骤四:判断当前浇筑区域的浇筑完成情况及溢出与否,在出料口会安装流量计装置,用来测量当前区域的实际浇筑量,当机械臂末端出料口根据规划的轨迹运动到指定的点位后,出料口会持续输出来自于输送管道的混凝土到该点位对应的浇筑区域,根据步骤三中实时计算并更新当前区域所需的浇筑量,并与末端流量计统计的流量进行匹配,从而判断当前浇筑区域的完成情况,若判断当前区域的浇筑任务已完成,则根据步骤二中规划的运动轨迹,自动控制布料口运动到下一个浇筑点位,并重复步骤三过程,根据步骤三中神经网络训练得到的结果,在持续的浇筑过程中,实时识别并判断当前浇筑区域的混凝土溢出情况;步骤五:判断机械臂布料机当前施工位置下的施工区域的浇筑完成情况,根据步骤二、三。四过程完成机器当前施工位置下所覆盖的待浇筑区域的所有浇筑点位对应的浇筑区域后,然后通过高清摄像头和激光雷达扫描当前施工位置下的施工区域,并通过过程步骤三中的方法识别并判断是否存在有漏浇筑或者浇筑不达标的点位对应的区域。
31.实施例一
32.首先,根据路径规划数据进行运动轨迹规划,根据步骤一中规划的浇筑信息需要进一步对布料机机械臂末端的运动进行轨迹规划,作为布料机布料口在浇筑过程中自动化运动,其次,融合图像识别和激光雷达数据计算区域待浇筑量,首先会通过高清摄像头收集大量建筑工程中关于施工过程中墙、板、梁、柱等的图像,以及对应属性信息下的待浇筑区域、已浇筑区域、浇筑溢出等图像制作为带标签的数据集,且判断当前浇筑区域的浇筑完成情况及溢出与否,在出料口会安装流量计装置,用来测量当前区域的实际浇筑量,随后判断机械臂布料机当前施工位置下的施工区域的浇筑完成情况,根据步骤二、三、四过程完成机器当前施工位置下所覆盖的待浇筑区域的所有浇筑点位对应的浇筑区域后,然后通过高清摄像头和激光雷达扫描当前施工位置下的施工区域,并通过过程步骤三中的方法识别并判断是否存在有漏浇筑或者浇筑不达标的点位对应的区域。
33.对照例一
34.首先,人工配合混凝土布料机、混凝土输送泵等机械装置,经操控布料机机械臂末端的运动进行浇筑,并经混凝土输送泵混凝土下料浇筑,由现场施工人员凭经验预测浇注量,施工过程中通过目测浇筑量,并把浇筑状态和下一步待浇筑区域反馈给布料机操作员,再由布料机操作员控制布料机的出口移动到对应区域,进而实现半自动浇筑作业。
35.本发明基于图像识别和激光雷达数据融合的混凝土自动浇筑计量方法,实现自动布料机机械臂浇筑范围内的自动浇筑,达到精准计算各浇筑结构的浇筑用量,使混凝土堆积更均匀,并且不会溢出模板的目的,同时无需人工现场操作和监控反馈,根据规划的路径数据和由图像识别及激光雷达数据融合计算,实现全自动浇筑施工。有效降低人工成本,提高施工质量和效率。
36.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或
基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
37.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1