一种识别装置及清洁机器人的制作方法
本发明涉及智能家居,特别涉及一种识别装置及清洁机器人。
背景技术:
1、随着技术的发展,出现了各种各样的具有智能系统的机器人,比如清洁机器人,可在无使用者操作的情况下自动行进并进行清洁或清除操作。通常机器人在行进过程中需要通过测距装置测量机器人与障碍物的距离,进而进行避障操作。测距装置仅可对障碍物的距离进行检测,不能识别障碍物的类型,因此没有办法作出精确的策略,影响行进路线的规划。
2、目前可以通过在机器人上设置摄像头来获取障碍物的图像并进行分析,从而可以识别障碍物的类型等,针对障碍物的类型做出精确的策略。但是摄像头对环境的依赖性较高,例如光线对摄像头的使用影响较大,光线较暗时,摄像头获取障碍物图像的效果较差,从而影响障碍物的识别准确率。若增加补光灯对摄像头进行补光,又会造成靠近工作面区域的光线过亮,影响摄像头捕获完整的图像。
技术实现思路
1、本发明提供一种识别装置及清洁机器人,以解决现有技术中清洁机器人的摄像头获取图像受环境光线影响较大的技术问题。
2、为解决上述技术问题,本发明采用的一个技术方案是提供一种识别装置,包括:
3、面壳,所述面壳的一侧形成有容置空间,另一侧形成有容置槽;
4、摄像头,设置于所述容置空间内,且外露于所述面壳;
5、补光灯,设置于所述容置槽内,所述面壳上设置有滤光片,所述滤光片用于遮挡所述补光灯发射的至少部分光线。
6、在一具体实施例中,所述容置槽的底面开设间隔设置的凹陷部和安装部,所述补光灯设置于所述凹陷部内,且部分自所述凹陷部外露,所述滤光片部分设置于所述安装部内,另一部分自所述安装部外露,用于遮挡部分所述补光灯外露的部分。
7、在一具体实施例中,所述面壳为不透光材料制成,所述凹陷部用于遮挡所述补光灯的部分,所述凹陷部遮挡所述补光灯的发光面积为10%至70%,所述滤光片呈长方体设置,所述滤光片沿水平方向的宽度为0.5mm至3mm,所述滤光片外露部分沿竖直方向的长度为2mm至5mm。
8、在一具体实施例中,所述滤光片对应所述补光灯的中部位置设置。
9、在一具体实施例中,所述滤光片对所述补光灯发射的光线的透光率为10%至90%。
10、在一具体实施例中,所述滤光片各个部分的透光率相同;或者
11、所述滤光片包括至少两种滤光部,至少两种所述滤光部的透光率不同。
12、在一具体实施例中,所述滤光片的面积大于或等于所述补光灯的发光面的面积,至少两种所述滤光部包括第一滤光部和两个第二滤光部,两个所述第二滤光部位于所述第一滤光部的两侧,所述第一滤光部的透光率小于所述第二滤光部的透光率。
13、在一具体实施例中,所述滤光片的面积大于或等于所述补光灯的发光面的面积,至少两种所述滤光部包括第三滤光部和第四滤光部,所述第三滤光部位于所述第四滤光部的顶部,所述第三滤光部的透光率大于所述第四滤光部的透光率。
14、在一具体实施例中,所述滤光片的面积大于或等于所述补光灯的发光面的面积,至少两种所述滤光部包括第五滤光部、第六滤光部以及第七滤光部,在竖直方向上,所述第六滤光部设置在所述第五滤光部的上方位置,所述第七滤光部设置在所述第五滤光部和所述第六滤光部之间,且在水平方向上,所述第七滤光部对应所述补光灯的中部位置;
15、所述第六滤光部的透光率大于或等于所述第五滤光部的透光率,所述第五滤光部的透光率大于等于所述第七滤光部的透光率。
16、为解决上述技术问题,本发明采用的另一个技术方案是提供一种清洁机器人,包括清洁机器人主体及设置于所述清洁机器人主体上的识别装置,所述清洁机器人主体用于对工作面进行清洁,所述识别装置用于获取所述清洁机器人的周围环境信息。
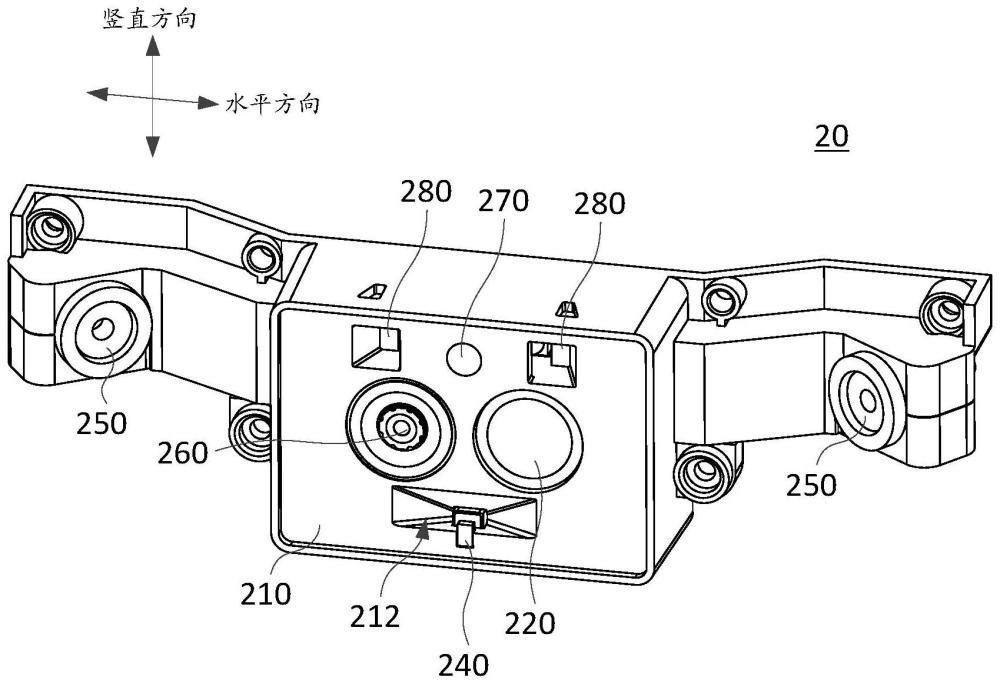
17、本发明识别装置包括面壳、摄像头以及补光灯,面壳的一侧形成有容置空间,另一侧形成有容置槽,摄像头设置于容置空间内,且外露于面壳,补光灯设置于容置槽内,面壳上设置有滤光片,滤光片用于遮挡补光灯发射的至少部分光线,使得补光灯发射的靠近工作面的光线能够被遮挡,避免靠近工作面的光线过亮而影响摄像头捕获完整的图像,使得获取的周围环境的图像的效果更好,进而使得对周围环境信息的获取更加准确。
技术特征:
1.一种识别装置(20),其特征在于,包括:
2.根据权利要求1所述的识别装置(20),其特征在于,所述容置槽(212)的底面开设间隔设置的凹陷部(213)和安装部(214),所述补光灯(230)设置于所述凹陷部(213)内,且部分自所述凹陷部(213)外露,所述滤光片(240)部分设置于所述安装部(214)内,另一部分自所述安装部(214)外露,用于遮挡部分所述补光灯(230)外露的部分。
3.根据权利要求2所述的识别装置(20),其特征在于,所述面壳(210)为不透光材料制成,所述凹陷部(213)用于遮挡所述补光灯(230)的部分,所述凹陷部(213)遮挡所述补光灯(230)的发光面积为10%至70%,所述滤光片(240)呈长方体设置,所述滤光片(240)沿水平方向的宽度为0.5mm至3mm,所述滤光片(240)外露部分沿竖直方向的长度为2mm至5mm。
4.根据权利要求2或3所述的识别装置(20),其特征在于,所述滤光片(240)对应所述补光灯(230)的中部位置设置。
5.根据权利要求1所述的识别装置(20),其特征在于,所述滤光片(240)对所述补光灯(230)发射的光线的透光率为10%至90%。
6.根据权利要求1所述的识别装置(30),其特征在于,所述滤光片(340)各个部分的透光率相同;或者
7.根据权利要求6所述的识别装置(30),其特征在于,所述滤光片(340)的面积大于或等于所述补光灯(330)的发光面的面积,至少两种所述滤光部包括第一滤光部和两个第二滤光部,两个所述第二滤光部位于所述第一滤光部的两侧,所述第一滤光部的透光率小于所述第二滤光部的透光率。
8.根据权利要求6所述的识别装置(30),其特征在于,所述滤光片(340)的面积大于或等于所述补光灯(330)的发光面的面积,至少两种所述滤光部包括第三滤光部和第四滤光部,所述第三滤光部位于所述第四滤光部的顶部,所述第三滤光部的透光率大于所述第四滤光部的透光率。
9.根据权利要求6所述的识别装置(30),其特征在于,所述滤光片(340)的面积大于或等于所述补光灯(330)的发光面的面积,至少两种所述滤光部包括第五滤光部、第六滤光部以及第七滤光部,在竖直方向上,所述第六滤光部设置在所述第五滤光部的上方位置,所述第七滤光部设置在所述第五滤光部和所述第六滤光部之间,且在水平方向上,所述第七滤光部对应所述补光灯的中部位置;
10.一种清洁机器人,其特征在于,包括清洁机器人主体及设置于所述清洁机器人主体上的识别装置,所述清洁机器人主体用于对工作面进行清洁,所述识别装置用于获取所述清洁机器人周围的环境信息。
技术总结
本发明公开了一种识别装置及清洁机器人,所述识别装置包括面壳、摄像头以及补光灯,面壳的一侧形成有容置空间,另一侧形成有容置槽,摄像头设置于容置空间内,且外露于面壳,补光灯设置于容置槽内,面壳上设置有滤光片,滤光片用于遮挡补光灯发射的至少部分光线,使得补光灯发射的靠近工作面的光线能够被遮挡,避免靠近工作面的光线过亮而影响摄像头捕获完整的图像,使得获取的周围环境的图像的效果更好,进而使得对周围环境信息的获取更加准确。
技术研发人员:钱亮,陈维,李昂,郭盖华
受保护的技术使用者:深圳乐动机器人股份有限公司
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!