充电设备对接方法、装置、机器人及存储介质与流程
本发明属于机器人,具体涉及一种充电设备对接方法、装置、机器人及存储介质。
背景技术:
1、随着科学技术的发展,产生了多种多样不同功能的移动机器人,已经成功部署到各行各业的应用场景中,给人们的工作和生活带来了很多便利。自主返回充电是移动机器人的一项重要功能,使得移动机器人能够在无人照管的情况下自主工作,避免断电。在自主返回充电时,如何使得移动机器人能够准确地对准充电设备,以实现与充电设备的精准对接是一个重要的问题。
2、传统方法中,一般是在移动机器人上安装相机或摄像头等拍摄设备来对充电设备上的二维码等标识进行识别,以确定充电设备的姿态,从而控制移动机器人与充电设备对接。然而,通过拍摄设备进行识别的方式,往往对环境亮度要求比较高,需要良好的光照条件才能实现,导致局限性比较大。
技术实现思路
1、因此,本发明所要解决的技术问题是机器人对接充电设备的局限问题。
2、为解决上述技术问题,本发明提供一种充电设备对接方法,包括:
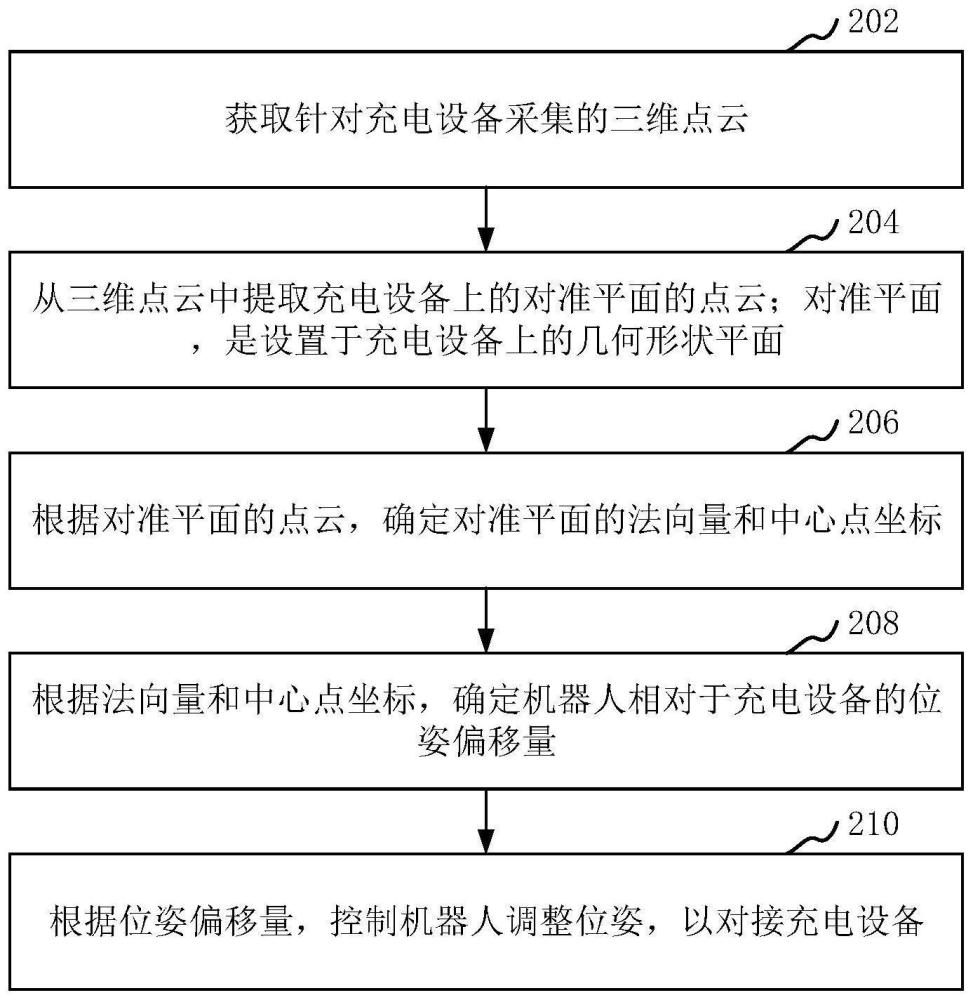
3、获取针对充电设备采集的三维点云;
4、从所述三维点云中提取所述充电设备上的对准平面的点云;所述对准平面,是设置于所述充电设备上的几何形状平面;
5、根据所述对准平面的点云,确定所述对准平面的法向量和中心点坐标;
6、根据所述法向量和所述中心点坐标,确定机器人相对于所述充电设备的位姿偏移量;
7、根据所述位姿偏移量,控制所述机器人调整位姿,以对接所述充电设备。
8、可选地,上述的充电设备对接方法中,所述位姿偏移量包括横向偏移量、纵向偏移量和角度偏移量;所述根据所述法向量和所述中心点坐标,确定机器人相对于所述充电设备的位姿偏移量包括:
9、根据所述中心点坐标,确定所述机器人相对于所述充电设备的纵向偏移量;
10、根据所述法向量,确定所述机器人相对于所述充电设备的角度偏移量;
11、根据所述角度偏移量和所述中心点坐标,确定所述机器人相对于所述充电设备的横向偏移量。
12、可选地,上述的充电设备对接方法中,所述根据所述角度偏移量和所述中心点坐标,确定所述机器人相对于所述充电设备的横向偏移量包括以下至少一种:
13、若所述角度偏移量小于或等于预设角度阈值,则根据所述中心点坐标确定所述机器人相对于所述充电设备的横向偏移量;
14、若所述角度偏移量大于所述预设角度阈值,则根据所述角度偏移量和所述中心点坐标,确定所述机器人的位置相对于所述充电设备的对接方向的第一偏移角度;根据所述中心点坐标和所述第一偏移角度,确定所述机器人相对于所述充电设备的横向偏移量。
15、可选地,上述的充电设备对接方法中,所述若所述角度偏移量大于所述预设角度阈值,则根据所述角度偏移量和所述中心点坐标,确定所述机器人的位置相对于所述充电设备的对接方向的第一偏移角度包括:
16、若所述角度偏移量大于所述预设角度阈值,则根据所述中心点坐标,确定所述充电设备的位置相对于所述机器人的对接方向的第二偏移角度;
17、根据所述角度偏移量和所述第二偏移角度,确定所述机器人的位置相对于所述充电设备的对接方向的第一偏移角度。
18、可选地,上述的充电设备对接方法中,所述根据所述角度偏移量和所述第二偏移角度,确定所述机器人的位置相对于所述充电设备的对接方向的第一偏移角度包括:
19、确定与偏转情况对应的偏移角度计算规则;所述偏转情况用于表征所述机器人相对于所述充电设备偏转的情况;
20、按照所述偏移角度计算规则,根据所述角度偏移量和所述第二偏移角度,确定所述机器人的位置相对于所述充电设备的对接方向的第一偏移角度。
21、可选地,上述的充电设备对接方法中,所述偏转情况包括第一正向偏转、第二正向偏转和反向偏转中的至少一种;所述根据所述偏移角度计算规则,根据所述角度偏移量和所述第二偏移角度,确定所述机器人的位置相对于所述充电设备的对接方向的第一偏移角度包括以下至少一种:
22、若所述机器人相对于所述充电设备的偏转情况为第一正向偏转,则根据所述角度偏移量和所述第二偏移角度之和,得到所述机器人的位置相对于所述充电设备的对接方向的第一偏移角度;所述第一正向偏转,是所述机器人朝着所述充电设备所处的方位在第一范围内偏转;
23、若所述机器人相对于所述充电设备的偏转情况为第二正向偏转,则根据所述角度偏移量和所述第二偏移角度之差,得到所述机器人的位置相对于所述充电设备的对接方向的第一偏移角度;所述第二正向偏转,是所述机器人朝着所述充电设备所处的方位在第二范围内偏转;所述第一正向偏转的偏转程度小于所述第二正向偏转的偏转程度;
24、若所述机器人相对于所述充电设备的偏转情况为反向偏转,则根据所述第二偏移角度和所述角度偏移量之差,得到所述机器人的位置相对于所述充电设备的对接方向的第一偏移角度;所述反向偏转,是所述机器人朝着所述充电设备所处的方位的反方向偏转。
25、可选地,上述的充电设备对接方法还包括:
26、根据所述充电设备相对于所述机器人的方位、所述中心点坐标的纵坐标值的正负、以及所述角度偏移量的正负,确定所述机器人相对于所述充电设备的偏转情况。
27、可选地,上述的充电设备对接方法中,所述根据所述充电设备相对于所述机器人的方位、所述中心点坐标的纵坐标值的正负、以及所述角度偏移量的正负,确定所述机器人相对于所述充电设备的偏转情况包括以下至少一种:
28、若所述充电设备位于所述机器人的右侧、所述纵坐标值为负、且所述角度偏移量为正,或者所述充电设备位于所述机器人的左侧、所述纵坐标值为正、且所述角度偏移量为负,则确定所述机器人相对于所述充电设备的偏转情况为第一正向偏转;
29、若所述充电设备位于所述机器人的右侧、且所述纵坐标值和所述角度偏移量均为正,或者所述充电设备位于所述机器人的左侧、且所述纵坐标值和所述角度偏移量均为负,则确定所述机器人相对于所述充电设备的偏转情况为第二正向偏转;
30、若所述充电设备位于所述机器人的右侧、且所述纵坐标值和所述角度偏移量均为负,或者所述充电设备位于所述机器人的左侧、且所述纵坐标值和所述角度偏移量均为正,则确定所述机器人相对于所述充电设备的偏转情况为反向偏转。
31、可选地,上述的充电设备对接方法中,所述从所述三维点云中提取所述充电设备上的对准平面的点云包括:
32、将所述三维点云进行聚类,得到多个点云团块;
33、从多个点云团块中分割出最大的点云团块作为充电设备点云;
34、从所述充电设备点云中提取所述对准平面的点云。
35、可选地,上述的充电设备对接方法中,,所述三维点云是所述机器人上的主动式感知传感器采集的;所述对准平面与所述主动式感知传感器的成像平面平行。
36、本发明还提供一种充电设备对接装置,包括:
37、点云获取模块,用于获取针对充电设备采集的三维点云;
38、平面点云提取模块,用于从所述三维点云中提取所述充电设备上的对准平面的点云;所述对准平面,是设置于所述充电设备上的几何形状平面;
39、位姿确定模块,用于根据所述对准平面的点云,确定所述对准平面的法向量和中心点坐标;根据所述法向量和所述中心点坐标,确定机器人相对于所述充电设备的位姿偏移量;
40、位姿调整模块,用于根据所述位姿偏移量,控制所述机器人调整位姿,以对接所述充电设备。
41、本发明还提供一种机器人,包括存储器和处理器,所述存储器存储有计算机程序,使得所述处理器执行本技术各实施例所述的充电设备对接方法中的步骤。
42、本发明还提供一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行本技术各实施例所述的充电设备对接方法中的步骤。
43、本发明还提供一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时,使得所述处理器执行本技术各实施例所述的充电设备对接方法中的步骤。
44、本发明提供的技术方案,具有以下优点:
45、本发明提供的充电设备对接方法、装置、机器人、存储介质及计算机程序产品,通过获取针对充电设备采集的三维点云来进行位姿偏移量的计算,因为采集三维点云对环境亮度条件没有依赖,所以即使在无光照的条件下依然可以正常采集三维点云,避免了环境亮度的影响。通过在充电设备上设置几何形状的对准平面,从三维点云中提取对准平面的点云,能够根据对准平面的几何特征准确地确定出对准平面的法向量和中心点坐标,进而根据向量和中心点坐标,准确地确定机器人相对于充电设备的位姿偏移量,从而能够根据准确的位姿偏移量,控制移动机器人调整位姿,以实现精准对接充电设备,不受限于环境亮度条件,避免了局限。
- 还没有人留言评论。精彩留言会获得点赞!