一种带浚测一体化系统的全电力驱动自航耙吸挖泥船的制作方法
1.本实用新型涉及一种自航耙吸式挖泥船,属于挖泥船设备技术领域。
背景技术:
2.自航耙吸式挖泥船是一种装备有耙头挖掘设备和水力吸泥装置的自航式、装舱式挖泥船,目前国内同类自航耙吸挖泥船存在如下现状:
3.(1)普遍采用复合驱动方式,推进主机一机多带,推进柴油机除直接驱动主推进器,还驱动轴带发电机,泥泵由主机前端直接驱动或由变频电机驱动。在针对各种作业环境条件和复杂工况时,对动力装置功率分配的灵活度尚不够高,某些工况下主机处于相对较低的负荷状态,不利于主机的运行和节能。
4.(2)以往挖泥船队普遍采用“挖泥船+测量船”的疏浚船队作业模式,即由测量船对作业区域进行水深数据测量,再由挖泥船进行挖泥疏浚作业,作业耗时长,作业精度和作业效率较低,营运经济性不高。
技术实现要素:
5.本实用新型的目的是:提供一种全电力驱动的自航耙吸挖泥船,本实用新型的进一步的目的是提供一种带浚测一体化系统的自航耙吸挖泥船。
6.为了达到上述目的,本实用新型的技术方案是提供了一种带浚测一体化系统的全电力驱动自航耙吸挖泥船,其特征在于,所述挖泥船采用全电力驱动系统,配置相应的机电设备,在不同环境条件、不同作业工况和指标范围中,能够更加灵活地进行动力装置功率分配;所述挖泥船配置浚测一体化系统,利用该船所具备的机动性强的特点实现浚前、浚中、浚后的测量工作,实现了疏浚与测量一体化工作模式。
7.优选地,所述挖泥船船体主甲板以上艉部到艏部依次为艉部系泊区、艉楼及艉甲板室、泥舱围板、艏楼及艏部系泊区;所述挖泥船船体主甲板以下艉部到艏部的主要机器处所依次为舵机舱、推进电机舱、机舱、泥舱及两侧浮力舱、泵舱、电机舱及电气设备间、艏尖舱。
8.优选地,所述全电力驱动系统的主电站为3~4台主柴油发电机组,每台发电机组由柴油机通过高弹联轴节直接驱动,主发电机组可以以任意方式组合长期并联运行,组成完整的电力系统,为全船所有负载提供电力,并设有用于满足停泊工况和应急工况下的全船用电需求的停泊发电机组和应急发电机组,主推进装置、水下泥泵、舱内泥泵和高压冲水泵均采用变频电机驱动,调速范围宽。
9.优选地,所述全电力驱动系统的主推进变压器、主推进变频器、中压配电板、主变压器等机电设备以及机舱集控室、分油机室等机器处所设在机舱二平台,机舱二平台另设有停泊发电机组,满足停泊工况下的全船用电需求。
10.优选地,所述全电力驱动系统的主推进装置包括两台变频调速推进电机、两只高弹联轴节、两台低噪音推进齿轮箱、两套导管桨及推进轴系。
11.优选地,所述浚测一体化系统通过在船舶上配置一套双基阵多波束测深系统来实现,利用所述全电力驱动自航耙吸挖泥船所具备的机动性强的特点来开展浚前、浚中、浚后的测量工作。
12.优选地,所述浚测一体化系统的两个多波束水下基阵安装在船艏部1/3船长之前处的左右对称布置的两个测量井内,测量井底部对应船体板开孔,测量井结构通道上部直通到主甲板以上。
13.优选地,每个所述测量井内安装一套自动升降测量机构,该机构外围结构为桁架形式,内设升降伺服机构、自动防污防腐装置,所述多波束水下基阵安装于测量机构上。
14.优选地,当开启测量模式时,所述自动升降机构将所述多波束水下基阵伸出船底板外约200mm,当测量结束时,所述自动升降机构将所述多波束水下基阵收回至船体内。
15.优选地,所述自动升降测量机构采用无需上坞即可进行日常维护和维修的分段式组装模式。
16.本实用新型提供的一种自航耙吸式挖泥船采用全电力驱动形式,在不同环境条件、不同作业工况和指标范围下,均能灵活地进行动力装置功率分配。本实用新型设置浚测一体化系统,使之同时具备疏浚和测量能力,减少了测量船的配置,利用该船所具备的机动性强的特点实现浚前、浚中、浚后的测量工作,实现疏浚与测量一体化工作模式。
附图说明
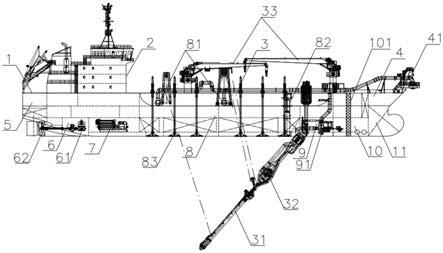
17.图1为本实用新型提供的带浚测一体化系统的全电力驱动自航耙吸挖泥船的总布置主视图;
18.图2为本实用新型提供的带浚测一体化系统的全电力驱动自航耙吸挖泥船的机舱舱内布置示意图;
19.图3为本实用新型提供的带浚测一体化系统的全电力驱动自航耙吸挖泥船的机舱二平台布置示意图;
20.图4为本实用新型提供的带浚测一体化系统的全电力驱动自航耙吸挖泥船的自动升降测量机构的结构桁架形式示意图;
21.图5为本实用新型提供的带浚测一体化系统的全电力驱动自航耙吸挖泥船的浚测一体化系统扫测区域示意图。
具体实施方式
22.下面结合具体实施例,进一步阐述本实用新型。应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本申请所附权利要求书所限定的范围。
23.如图1所示,本实用新型提供的一种带浚测一体化系统的全电力驱动自航耙吸挖泥船包括船体,船体主甲板以上艉部到艏部依次为艉部系泊区1、艉楼及艉甲板室2、泥舱围板3、艏楼及艏部系泊区4;船体主甲板以下艉部到艏部依次为舵机舱5、推进电机舱6、机舱7、泥舱及两侧浮力舱8、泵舱9、电机舱及电气设备间10、艏尖舱11。
24.泥舱围板3左、右两侧分别设有一个三支点耙管31,两台水下泥泵32分别位于左右
两侧的三支点耙管31上,通过水下泥泵32或泵舱9内的舱内泥泵91,可进行双耙或单耙疏浚作业。泥舱围板3所对应的泥舱段首尾部各设一台液压甲板固定吊33,用于设备维修和起吊重物等。
25.艏部系泊区4设有艏吹装置41,可采用艏吹接头、吹泥浮管或艏部喷嘴,通过抽舱管路、舱内泵单泵或双泵串联进行艏吹排岸或艏喷作业。
26.本实用新型的泥舱8中、后部上方设有两组装舱消能箱81,装舱时,两组装舱消能箱81可分组使用,以减少泥浆动能,加快沉淀,根据不同的土质,可调整装舱消能箱81在泥舱8中的深度。泥舱8前部设置一只液压缸调节的溢流筒82,在一定行程范围内可进行连续调节。泥舱8内底部设有两列泥门83进行卸泥。
27.本实用新型所采用的全电力驱动系统的主电站由机舱7内的3~4台主柴油发电机组71构成,主柴油发电机组71可以任意组合,长期并联运行组成完整的电力系统,为全船所有负载提供电力,并满足全船设备的用电需要。
28.推进电机舱6内设有主推进装置的变频推进电机61,经高弹联轴节、低噪音推进齿轮箱和推进轴系驱动两套主推进导管桨62,如图2所示。机舱7二平台设有停泊发电机组72,满足停泊工况下的全船用电需求,另设有全电力驱动系统的主推进变压器73、主推进变频器74、中压配电板75、主变压器76等机电设备以及机舱集控室77、分油机室78等机器处所,如图3所示。
29.本实用新型采用全电驱动型式,主推进导管桨62、水下泥泵32、舱内泥泵91和高压冲水泵等大功率设备均采用变频电机驱动,调速范围宽,相比于传统耙吸挖泥船柴油机直接驱动桨的驱动方式,在针对各种作业环境条件和复杂工况时,均能灵活地进行动力装置功率分配,使发电机组达到合适的功率负荷状态,并有适宜的功率储备,燃油消耗低,环保节能,相对于常规耙吸挖泥船的复合驱动形式,展现了更佳的营运经济性,体现了可持续发展的理念。
30.本实用新型配置一套双基阵多波束测深系统101,在船舶艏部的1/3船长之前处左右对称设置两个测量井,将双基阵多波束测深系统101的两个多波束水下基阵91、92安装在测量井内,如图1和图5所示。测量井底部对应船底板开孔,测量井结构通道经电机舱及电气设备间10向上直通到泥舱甲板,在每个测量井内安装一套自动升降测量机构,该机构外围结构为桁架形式,如图4所示,内设升降伺服机构、自动防污防腐装置等,多波束水下基阵91、92安装于测量机构上。当开启测量模式时,自动升降机构将多波束水下基阵91、92伸出船底板外约200mm,当测量结束时,自动升降机构将多波束水下基阵91、92收回至船体内。该升降机构采用分段式组装模式,无需上坞即可进行日常维护和维修。浚测一体化系统扫测区域示意图如图5所示,其中,区域a为当前扫测区域,区域b为航行过程中扫测区域。
31.耙吸船浚测一体化系统利用自航式耙吸船所具备的机动性强的特点来实现浚前、浚中、浚后的测量工作。开展浚前测量工作时,船舶施工人员在相应系统软件设置待测区域,自动生成航测控制线,在待测区域内航行即可完成浚前水深数据的测量并自动成图。浚中测量即在船舶施工的同时开展测量,此时水下基阵扫测的数据即是耙头即将施工的区域的水深数据,可为施工人员提供及时的水深数据指导。浚后测量的操作流程类似于浚前测量,可充分利用施工间隙、抛泥航行等时间来完成浚后测量,以便于施工人员利用浚后数据进行施工质量检查。
32.综上所述,本实用新型提供的一种带浚测一体化系统的全电力驱动自航耙吸挖泥船,通过采用全电力驱动型式,在不同环境条件、不同作业工况和指标范围中,均能灵活地进行动力装置功率分配,燃油消耗低,环保节能,展现了更佳的营运经济性;配置了浚测一体化系统,实现了疏浚与测量一体化工作模式,提升了航道维护疏浚的能力,提高了航道维护疏浚的精度和效率。本实用新型有效克服了现有技术中的种种不足或缺陷,具有良好的市场推广前景和产业利用价值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1