一种河湖底泥中微塑料的清除装置
1.本实用新型涉及微塑料清除技术领域,具体是一种河湖底泥中微塑料的清除装置。
背景技术:
2.目前对于微塑料(毫米级或更小)的污染状况备受关注,广泛存在于水体中的微塑料对环境造成了很大程度的污染,不仅会对水中的生物造成一定威胁,同时也影响人们的健康,因此对河湖微塑料的回收处理显得极为重要,目前仅存在单纯将几种机器进行搭配使用的情况,缺少可有效处理微塑料的技术和设备。
技术实现要素:
3.针对上述现有技术,本实用新型提供一种河湖底泥中微塑料的清除装置,操作自动化,运行效率高,清除效果好。
4.本实用新型提供的一种河湖底泥中微塑料的清除装置, 包括:
5.船体;
6.扬翻装置,与所述船体连接;
7.吸附装置,包括吸附仓、机械臂和水气两用泵;所述水气两用泵设于所述船体上,所述水气两用泵上设有泵体进气口和泵体出水口;所述机械臂的一端与所述吸附仓连接,另一端与所述水气两用泵连接,且所述机械臂可在水平面内与垂直内旋转;所述机械臂的内部设有连通软管,用于连通所述水气两用泵和所述吸附仓;所述连通软管的内部设有流量计;所述吸附仓的内部设有滤网;
8.分离与收集装置,包括离心装置和取样装置;所述取样装置置于所述离心装置的上方,且所述取样装置可在水平面内旋转;所述取样装置上设有多个取样孔,所述多个取样孔布置为同心环状;
9.控制系统,用于控制所述船体、扬翻装置、吸附装置和分离与收集装置。
10.优选地,所述扬翻装置包括带齿滚轮和连接杆,所述连接杆的一端与带齿滚轮固定连接,另一端通过第一垂直旋转钮与船体连接。
11.优选地,所述机械臂通过第二垂直旋转钮与旋转支架连接,所述旋转支架通过第一水平旋转钮与基座连接,所述基座设于水气两用泵上。
12.优选地,所述吸附仓上设有开合门,所述吸附仓的内部设有多层滤网。
13.优选地,所述多层滤网由下至上孔径依次递减。
14.优选地,所述分离与收集装置设置为一体式,还包括总控制台,所述离心装置和取样装置均与总控制台连接,所述总控制台与所述控制系统连接。
15.优选地,所述取样装置还通过第二水平旋转钮安装于所述总控制台的上端。
16.优选地,所述离心装置还通过底座安装于所述总控制台的上端。
17.相对于现有技术,本实用新型的有益效果为:本实用新型将对河湖底泥的扬尘和
除尘进行有机结合,对富营养化水体进行处理,清除微塑料,并有效防止二次污染的发生,大幅提高了除淤效率,具有操作自动化,运行效率高,清除效果好的特点。
附图说明
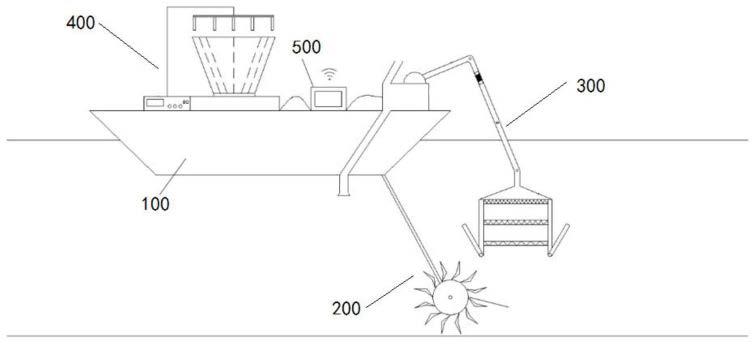
18.图1是本实用新型实施例的平面示意图。
19.图2是本实用新型实施例的立体示意图。
20.图3是本实用新型实施例中分离与收集装置的结构示意图。
21.图4是本实用新型实施例中取样孔的结构示意图。
22.图中,100、船体;200、扬翻装置;201、带齿滚轮;202、连接杆;203、第一垂直旋转钮;300、吸附装置;301、吸附仓;3011、滤网;3012、开合门;302、机械臂;303、水气两用泵;3031、泵体进气口;3032、泵体出水口;304、旋转支架;305、流量计;400、分离与收集装置;401、离心装置;402、取样装置;4021、取样孔;403、总控制台;404、底座;405、第二水平旋转钮;500、控制系统。
具体实施方式
23.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本实用新型。
实施例
24.如图1-4所示,一种河湖底泥中微塑料的清除装置,包括:船体100、扬翻装置200、吸附装置300、分离与收集装置400和控制系统500。
25.参照图1-2,船体100的内部安装动力系统,由控制系统500控制。扬翻装置200包括带齿滚轮201和连接杆202,连接杆202的一端与带齿滚轮201的轮轴固定连接,另一端通过第一垂直旋转钮203与船体的底部连接,第一垂直旋转钮203设置为电动式,由控制系统500控制,可带动连接杆202联动带齿滚轮201在垂直面内旋转。
26.进一步地,吸附装置300包括吸附仓301、机械臂302和水气两用泵303;吸附仓301的内部设有多层滤网3011,多层滤网3011由下至上孔径依次递减,可根据吸附目标选择合适孔径的滤网并将其固定在吸附仓301内,如若需回收粒径范围在500-5000微米的pe微塑料,则可以选择孔径在500微米左右的滤网,并在滤网上添加适量对pe材料具有吸附性的物质。
27.吸附仓301的出口处设有开合门3012,开合门3012包括两扇与吸附仓301铰连接的单侧门,开合门3012设置为电动式,由控制系统500控制其开合,避免吸附完毕后吸附仓301从水中升起时混合物质再次泄漏造成二次污染。
28.水气两用泵303固定安装在船体100上,水气两用泵303上设有泵体进气口3031和泵体出水口3032,泵体出水口3032延伸至船体100的外底部。水气两用泵303既可从水中吸附混合物质,也能将混合物质排至分离与收集装置400中:吸附环节中,使用水泵模式,将混合物质吸附至吸收仓301内,并使水流通过船底的泵体出水口3032返回至水体中;回收环节中,切换为气泵模式,可将吸收仓301中的混合物质转移至分离与收集装置400中。其中,水泵模式下,正向使用水泵时,可使水流通过机械臂302中的连通软管流入泵体并从位于船底
的泵体出水口3032流出;反向使用水泵时,可使水流通过机械臂302中的连通软管流回吸收仓301的出口处。
29.机械臂302的一端与吸附仓301固定连接,另一端通过第二垂直旋转钮与旋转支架304连接,旋转支架304通过第一水平旋转钮与基座连接,所述基座固定于水气两用泵303上,第二垂直旋转钮与第一水平旋转钮均设置为电动式,由控制系统500控制,可带动机械臂302在垂直面内和水平面内旋转。机械臂302的内部设有连通软管,该连通软管的一端与水气两用泵连接,另一端与吸附仓的内部连通,且该连通软管的内部设有流量计305,流量计305与控制系统500连接,可检测连通软管内流量的变化,泵功率控制一定,检测流量变化,当流量降低至一定范围时,说明多层滤网3011已占满混合物质,此次吸附完毕,反馈信号;当流量发生突变时,说明可能有堵塞情况发生,此时应控制泵体反向工作,将多层滤网3011吸附的大型堵塞物体排除。
30.参照图3-4,分离与收集装置400设置为一体式,包括离心装置401和取样装置402,离心装置401和取样装置402均与总控制台403连接。离心装置401还通过底座404安装于总控制台403的上端。取样装置402上设有多个取样孔4021,多个取样孔4021布置为同心环状,且置于离心装置401的上方,可分区域进行物质的收集,取样装置402还通过第二水平旋转钮405安装于总控制台403的上端,第二水平旋转钮405设置为电动式,由控制系统500控制,可带动取样装置402在水平面内旋转。总控制台403由控制系统500控制,可控制离心装置401通过旋转离心的方式按密度梯度将吸附到的混合物质进行分离,以及通过取样装置402将按密度范围收集到的物质分别置于不同的收集区域。
31.本实施例的操作方法为:
32.s1、调整连接杆202与机械臂302,控制带齿滚轮201在水底,且吸附仓301在带齿滚轮201上方的合适位置,本实施例为斜上方45度,距离1m,以便于吸附翻起的物质。启动船体100,带动带齿滚轮201翻动底泥,并将其扬起,从而使沉积于底泥中的微塑料及其余物质脱离河床。
33.s2、打开吸附仓301的开合门3012,开启水气两用泵303的水泵模式,混合物质随水流进入吸附仓301,包含微塑料的混合物质分粒径滞留于吸附仓301内,水流通过连通软管自泵体出水口3032流出,返回至水体中;当收到流量计305反馈的完毕信号时,说明单次吸收过程结束,关闭开合门3012和水气两用泵303,控制机械臂302带动吸附仓301移至离心装置401的正上方区域。
34.s3、控制取样装置402水平旋转180度,打开开合门3012,开启水气两用泵303的气泵模式,气体自泵体进气口3031进入,带动吸附仓301内的混合物质下落至离心装置401的内部。
35.s4、启动离心装置401,对所述混合物质进行分密度旋转离心操作。
36.s5、离心结束后,控制取样装置402水平回转,沿径向对离心装置401内分离后的物质进行分环形区域的取样操作,将按密度范围收集到的物质分别置于不同的收集区域。
37.s6、通过控制系统500,重复操作步骤2-6,清除完成后自动开始下一次的清除过程。
38.s7、所有的清除工作完成后,集中回收取样装置402收集到的物质,并采用显微红外光谱仪、拉曼光谱仪等鉴别后进行分类处理,将有害物质进行清除回收,将有益物质如某
些有益微生物、有机质、无机盐等人工返还至水体中,以避免影响原有生态环境。
39.以上仅为本实用新型的实施方式,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构,直接或间接运用在其他相关的技术领域,均同理在本实用新型的专利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1