一种导游扫地用机器人及其语音交互方法与流程
1.本发明涉及机器人技术领域,特别涉及一种导游扫地用机器人及其语音交互方法。
背景技术:
2.人类的科学技术在不断的跟新迭代,机器人也开始出现在人们的生活中,并且服务于人们的生活。随着各种新型材料的出现,传感器。计算机技术的发展,服务类的机器人逐渐在市场上出现,为人们的智能生活提供便利。扫地机器人作为一款智能家居,具备一定的人工智能化,能够自主进行清扫工作,为人们解放了双手,提高了工作效率。而现今市面上的扫地机器人一般只适合于家庭环境简单的地面,而不适合用于农村街道的泥土或者高低不平的地面;而且,市面上的机器人一般底部配置小型清扫刷与吸尘滚刷相配合,通过超声波识别进行清洁工作;但是这种运行方式不适用于农村街道多样化的环境。如今,为了领略乡土人情,越来越多的农村成为人们自驾游的目的地。作为旅游景点,干净卫生是首要保持的,人工清扫需要休息,且高温酷暑的天气会降低工作效率以及提高清洁工中暑的几率,采用机器清扫可大幅度降低严寒酷暑天气对清扫工作的影响。
3.目前的扫地机器人还不具备导航指引的功能,作为旅游景点,路线的指引需要关注的问题之一,若特意配置导游人员,人工成本较高;若没有专人指引,则可能会降低旅客的游玩体验感。
4.可见,现有技术还有待改进和提高。
技术实现要素:
5.鉴于上述现有技术的不足之处,本发明的目的在于提供一种导游扫地用机器人及其语音交互方法,旨在解决现有技术中上述提及的至少一个技术问题。
6.为了达到上述目的,本发明采取了以下技术方案:
7.一种导游扫地用机器人,包括机器人本体、控制器、语音交互系统、障碍危险识别系统、电源组件、清扫组件和行走机构,所述控制器设置在机器人本体内,分别与语音交互系统、障碍危险识别系统、电源组件、清扫组件和行走机构电性连接;
8.所述交互模块用于采集环境的语音信息,将信息反馈至控制器,并输出控制器反馈的信息;
9.所述障碍危险识别系统用于采集环境信息,反馈至控制器进行识别。
10.所述的导游扫地用机器人中,所述语音交互系统包括语音接收单元,语音输出单元和显示屏,所述语音接收单元用于采集环境信息,所述语音输出单元用于通过语音播放控制器反馈的信息,所述显示屏用于显示控制器反馈的信息。
11.所述的导游扫地用机器人中,所述语音输出单元包括一个或多个喇叭,所述语音接收单元包括一个或多个收音麦克风,所述显示屏设置在机器人本体的上部。
12.所述的导游扫地用机器人中,所述障碍危险识别系统包括雷达和图像采集单元,
所述雷达包括4个或以上,分别沿机器人本体外周的下部等距设置,所述图像采集单元设置在机器人本体正面的下部。
13.所述的导游扫地用机器人中,所述雷达为毫米波雷达,所述图像采集单元为双目摄像头。
14.所述的导游扫地用机器人中,所述清扫组件包括滚动毛刷、垃圾收集斗、吸尘器和垃圾收集仓,所述滚动毛刷和垃圾收集斗设置在机器人本体底部,所述滚动毛刷设置在垃圾收集斗的正前方,所述垃圾收集仓设置在机器人本体内,与垃圾收集斗连通,所述吸尘器配制为将垃圾收集斗中的垃圾吸入垃圾收集仓中。
15.所述的导游扫地用机器人中,所述清扫组件还包括红外满载雷达,所述红外满载雷达设置在所述垃圾收集仓内,与控制器电性连接,用于检测所述垃圾收集仓是否满仓。
16.所述的导游扫地用机器人中,所述电源组件包括发电单元、蓄电池和充电单元,所述发电单元分别与控制器和蓄电池电性连接,所述充电单元分别与蓄电池和控制器电性连接。
17.所述的导游扫地用机器人中,所述行走机构包括设置在机器人本体底部的万向轮,所述万向轮包括3个,呈三角形排布。
18.一种导游扫地用机器人的语音交互方法,包括如上所述的机器人,所述方法包括:
19.a100.语音接收单元采集语音信息并发送至控制器;
20.a200.当控制器识别到呼叫唤醒词时,识别声音的方位,控制行走机构运动至使显示屏正对音源;
21.a300.控制器根据接收到的语音信息匹配解决方案,若存在解决方案,则输出该解决方案至语音输出单元和显示屏中;若匹配不到解决方案,则将该语音信息传输至后台云服务器中,后台云服务器接收并分析语音信息,反馈解决方案至控制器中,控制器将解决方案输出至语音输出单元和显示屏中;
22.a400.语音输出单元和显示屏分别输出解决方案。
23.有益效果:
24.本发明提供了一种导游扫地用机器人及其语音交互方法,所述机器人通过设置障碍危险识别系统能够对户外较复杂的环境情况进行识别和规避危险,所述障碍危险识别系统采用图像采集单元辅助雷达工作,提高了障碍规避的精准度,配合行走机构,适用于较复杂的地面环境使用。通过语音交互系统在语音和图像显示上与游客进行交互,兼具了导游的功能;通过由控制器控制的清扫组件,自动实现清扫和清空垃圾的功能,自动化程度高。
附图说明
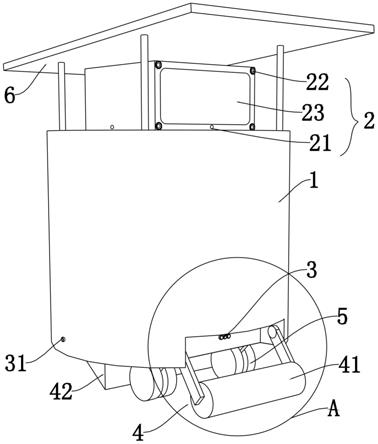
25.图1为本发明提供的所述导游扫地用机器人的结构示意图一。
26.图2为图1中的a部放大图。
27.图3为所述导游扫地用机器人的结构示意图二。
28.图4为所述导游扫地用机器人的语音交互方法的流程图。
29.主要元件符号说明:1
‑
机器人本体,2
‑
语音交互系统,3
‑
障碍危险识别系统,4
‑
清扫组件,5
‑
行走机构,6
‑
电源组件,21
‑
语音接收单元,22
‑
语音输出单元,23
‑
显示屏,31
‑
雷达,32
‑
图像采集单元,41
‑
滚动毛刷,42
‑
垃圾收集斗。
具体实施方式
30.本发明提供一种导游扫地用机器人及其语音交互方法,为使本发明的目的、技术方案及效果更加清楚、明确,以下参照附图并举实施例对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
31.在本发明的描述中,需要理解的是,术语“上”、“下”、“左”、“右”等指示方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以及特定的方位构造和操作,因此,不能理解为对本发明的限制。本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
32.请参阅图1
‑
3,本发明提供一种导游扫地用机器人,适用于农村街道复杂的地面环境,主要用于农村街道的清洁,以及为作为旅游区的农村提供导游的工作,包括但不限于回答游客的问题、指引路线,提高了旅客的游玩体验。所述机器人包括机器人本体1、控制器(图中未示出)、语音交互系统2、障碍危险识别系统3、电源组件6、清扫组件4和行走机构5,所述控制器设置在机器人本体1内,分别与语音交互系统2、障碍危险识别系统3、电源组件6、清扫组件4和行走机构5电性连接;所述交互模块用于采集环境的语音信息,将信息反馈至控制器,并输出控制器反馈的信息;所述障碍危险识别系统3用于采集环境信息,反馈至控制器进行识别。
33.所述机器人通过语音交互系统2,与游客进行语音交互,实现导游的功能,解放了人力,降低了人工成本;通过障碍危险识别系统3和行走机构5的搭配使用,能够有效区别危险障碍物,并避开,适用于室外较复杂的地面环境。所述机器人通过控制器集中控制,自动化程度高,能实现在没有接收到导游提示时实施清洁功能。所述控制器包括处理器和网关,所述处理器包括但不限于stn32高速处理器,所述网关包括5g信号网关、4g信号网关、3g信号网关、2g信号网关等中的一种。
34.具体的,所述语音交互系统2包括语音接收单元21,语音输出单元22和显示屏23,所述语音接收单元21用于采集环境信息,所述语音输出单元22用于通过语音播放控制器反馈的信息,所述显示屏23用于显示控制器反馈的信息。为了避免在嘈杂的环境中游客难以听清楚语音输出单元22输出的语音信息,该语音信息会以文字或图片等形式同步显示在显示屏23中,作为辅助显示。
35.进一步的,所述语音输出单元22包括一个或多个喇叭,所述语音接收单元21包括一个或多个收音麦克风,所述显示屏23设置在机器人本体1的上部。一种实施方式中,所述语音输出单元22包括四个喇叭,分别设置在显示屏23的四个角的外侧,保证在嘈杂的环境中的游客仍能够清晰地听到所述机器人的语音输出的信息。所述收音麦克风包括四个,分别设置在所述机器人前、后、左、右方向的侧壁上,使得所述收音麦克风接收语音信息时,能够根据不同收音麦克风接收到声音的强度差,判断呼叫唤醒词的游客所在的位置,使得机器人转向至正对游客的位置(即显示屏23正对游客),使游客能够同步听到语音信息和看到显示屏23上的辅助显示信息,提高交互效果。
36.一种实施方式中,所述障碍危险识别系统3包括雷达31和图像采集单元32,所述雷达31包括4个或以上,分别沿机器人本体1外周的下部等距设置,所述图像采集单元32设置在机器人本体1正面的下部。所述雷达31设置在机器人的下部,对低矮或者跌落的细小物件
也能实施检测,提高了其识别功能;所述图像采集单元32作为雷达31的辅助识别设备,能够在雷达31识别有误或者损坏的情况下,采集目标图像,通过网络传输到后台云服务器进行比对,再根据结果进行判断是否需要避让,再将判断结果传输回所述机器人,机器人根据指令进行相应的操作。
37.优选的,所述雷达31为毫米波雷达,所述图像采集单元32为双目摄像头。毫米波雷达的波导引头对烟雾灰尘的穿透能力强,且抗干扰能力相对于其他雷达更强,能够识别很小的目标,而且能够同时识别多个目标,具有成像能力,可进一步筛选障碍物。例如,农村动物较多,特别是狗喜欢在街上溜达,毫米滤波雷达因可以辨识很小的目标且具有成像能力,可以采集目标的图像信息与数据库对比,判断障碍物是动物还是汽车灯,判断是否需要避让,大大减少了误判的情况,也减少了作出不必要的避让而花费的时间。双目摄像头具有测距的功能,在语音接收单元21识别到汽车鸣笛或者其它产生危险的声音时,控制器控制机器人转动至相应的方向,启动双目摄像头进行辅助识别车辆与自身的距离,判断是否安全。
38.所述清扫组件4包括滚动毛刷41、垃圾收集斗42、吸尘器(图中未示出)和垃圾收集仓(图中未示出),所述滚动毛刷41和垃圾收集斗42设置在机器人本体1底部,所述滚动毛刷41设置在垃圾收集斗42的正前方,所述垃圾收集仓设置在机器人本体1内,与垃圾收集斗42连通,所述吸尘器配制为将垃圾收集斗42中的垃圾吸入垃圾收集仓中。所述滚动毛刷41与机器人本体1的底部铰接,通过前后摆动的方式将垃圾扫至垃圾收集斗中,再通过连接垃圾收集斗42的吸尘器将垃圾收入垃圾收集仓中。所述垃圾收集斗42的底部为倾斜向上的斜面,更便于垃圾收纳进垃圾收集仓中;垃圾收集斗42的下端略高于行走机构5的下端,不会影响所述机器人平稳行走。
39.进一步的,所述清扫组件4还包括红外满载雷达31,所述红外满载雷达31设置在所述垃圾收集仓内,与控制器电性连接,用于检测所述垃圾收集仓是否满仓;所述红外满载雷达31对垃圾收集仓进行实时检测,当检测到所述垃圾收集仓满载时,机器人会行走到垃圾堆放点进行垃圾清理,清理后再重新回到街道进行清扫,使得所述机器人能够及时自动清空垃圾,不需要人工监控。
40.进一步的,所述电源组件6包括发电单元、蓄电池和充电单元,所述发电单元分别与控制器和蓄电池电性连接,所述充电单元分别与蓄电池和控制器电性连接。通过配备充电单元和发电单元加快了所述机器人的充电速度;所述发电单元可以包括风力发电,太阳能发电等。本实施方式中,所述发电单元为太阳能发电单元,包括设置在机器人本体1顶部的硅晶体太阳能发电板。机器人配备大容量的蓄电池,使所述机器人具有超长的续航时间。
41.所述行走机构5包括设置在机器人本体1底部的万向轮,所述万向轮包括3个,呈三角形排布;万向轮可以在有限的空间内灵活地转向,降低所述机器人的局限性;万向轮呈三角形排布,稳定性较高,保证所述机器人行走过程中的平衡。
42.请参阅图4,一种导游扫地用机器人的语音交互方法,包括如上所述的机器人,所述方法包括:
43.a100.语音接收单元21采集语音信息并发送至控制器;
44.a200.当控制器识别到呼叫唤醒词时,识别声音的方位,控制行走机构5运动至使显示屏23正对音源,通过显示屏23辅助显示。机器人的控制器包括存储功能,其储存的数据库中包括景点的各种导航信息和游客的常用问题的答复等;还可以存储预设的呼叫唤醒
词,该呼叫唤醒词的设置能够避免的机器人语音交互系统的误触发。该呼叫唤醒词可以显示在显示屏中,或者印刷、张贴在机器人本体容易引起人们注意的地方。
45.a300.控制器根据接收到的语音信息匹配解决方案,若存在解决方案,则输出该解决方案至语音输出单元22和显示屏23中;若匹配不到解决方案,则将该语音信息传输至后台云服务器中,后台云服务器接收并分析语音信息,反馈解决方案至控制器中,控制器将解决方案输出至语音输出单元22和显示屏23中;
46.语音接收单元21接收语音信息后,控制器会进行初步筛选,若为本地处理器可解决的问题,则直接输出解决方案对游客进行应答;若本地处理器找不到解决方案,则通过网关实时将该语音信息传输到后台管理中心的云服务器中进行语音对比,并且输出应对方案,再将应对方案传输会机器人,使其可以与游客进行语音交互操作。
47.a400.语音输出单元22和显示屏23分别输出解决方案。
48.在语音交互过程中,显示屏23会辅助显示。例如:在游客询问公共场所的位置时,语音交互系统2会根据机器人坐在的位置作出相应的指路操作,显示屏23显示整体地图,并且标记处目标位置以及高亮显示出目标的路线、类似导航。通过语音输出单元22和显示屏23的配合,能够更明确地为游客作出指示。
49.可以理解的是,对本领域普通技术人员来说,可以根据本发明的技术方案及其发明构思加以等同替换或改变,而所有这些改变或替换都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1