一种轨道搬运夹爪的制作方法
本技术涉及夹爪,尤其涉及一种轨道搬运夹爪。
背景技术:
1、在矿山井下,为了保证人员、物料、煤炭的运输,生产矿井都在每个巷道铺设保证矿车运行的轨道,开拓工作面和掘进工作面,需要经常铺设轨道。在采煤工作面回采期间,为了降低矿井生产成本,又要对采煤工作面和其他相关巷道的轨道进行回收,进行轨道的重复利用。为此,轨道的敷设、回收,就成为了在巷道掘进和回采期间的一项重要工作。
2、由于受井下作业空间的限制,在巷道中不能使用大型的起重和搬运设备,在井下运输轨道就成为一项比较费力又安全风险比较高的工作。
3、1、工作人员蹲下作业时,由于轨道不好抓、运输不方便,所以绝大多数职工需要先用手抬起轨道,然后再把轨道扛到肩膀上运输,操作不方便。
4、2、由于轨道在作业人员肩膀上运输重心比较高、轨道有比较重,经常发生职工被轨道砸伤手脚和身体其他部位的事故。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种轨道搬运夹爪,通过三眼集成块、卡爪、拉环和护套的相互配合使用,克服了现有技术的不足,有效的解决了操作不方便且轨道容易脱落砸伤工作人员的问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种轨道搬运夹爪,包括三眼集成块,所述三眼集成块顶部两侧内壁均设置有对称分布的连杆,且两个连杆之间设置有抓杆,所述抓杆一端外壁焊接有卡爪,且卡爪外壁设置有防滑齿,所述三眼集成块顶部设置有拉环,且拉环顶部设置有护套。
4、通过上述的方案,放下卡爪时,卡爪会分离,在搬运轨道时,卡爪会紧紧卡在轨道的外壁上,方便抬起轨道,利用了简单的杠杆机械原理和重力原理实现了轨道的抬升,既简单方便,又快捷,在夹爪的上方设置了拉环和护套,工作人员可将护套穿戴在手臂上并握住拉环拉起轨道,避免了夹爪从手上脱落导致轨道砸伤手脚和身体其他部位的事故,安全性高。
5、优选的,所述三眼集成块和连杆之间、连杆和抓杆之间以及两个抓杆之间均转动连接有销轴。
6、通过上述的方案,在销轴的作用下,三眼集成块和连杆之间、连杆和抓杆之间以及两个抓杆之间均能够相互转动。
7、优选的,所述三眼集成块顶部外壁挂接有第一锁链,且拉环底部外壁焊接有第一连接扣,第一锁链一端外壁挂接在第一连接扣的内壁。
8、通过上述的方案,第一锁链能够将三眼集成块和拉环连接在一起。
9、优选的,所述拉环顶部内壁开设有等距离分布的放置槽。
10、通过上述的方案,放置槽能够方便工作人员用手握住拉环。
11、优选的,所述护套外壁粘接有魔术贴。
12、通过上述的方案,魔术贴能够方便将护套套在工作人员的手臂上。
13、优选的,所述拉环一侧外壁的底部焊接有第二连接扣,且第二连接扣内壁挂接有第二锁链,第二锁链一端外壁挂接在护套的内壁上。
14、通过上述的方案,第二锁链能够将拉环和护套连接在一起。
15、优选的,两个所述卡爪之间呈对称分布。
16、通过上述的方案,能够卡爪抓取轨道的稳定性。
17、本实用新型的有益效果为:
18、1、本设计的轨道搬运夹爪,放下卡爪时,卡爪会分离,在搬运轨道时,卡爪会紧紧卡在轨道的外壁上,方便抬起轨道,利用了简单的杠杆机械原理和重力原理实现了轨道的抬升,既简单方便,又快捷;
19、2、本设计的轨道搬运夹爪,在夹爪的上方设置了拉环和护套,工作人员可将护套穿戴在手臂上并握住拉环拉起轨道,避免了夹爪从手上脱落导致轨道砸伤手脚和身体其他部位的事故,安全性高。
技术特征:
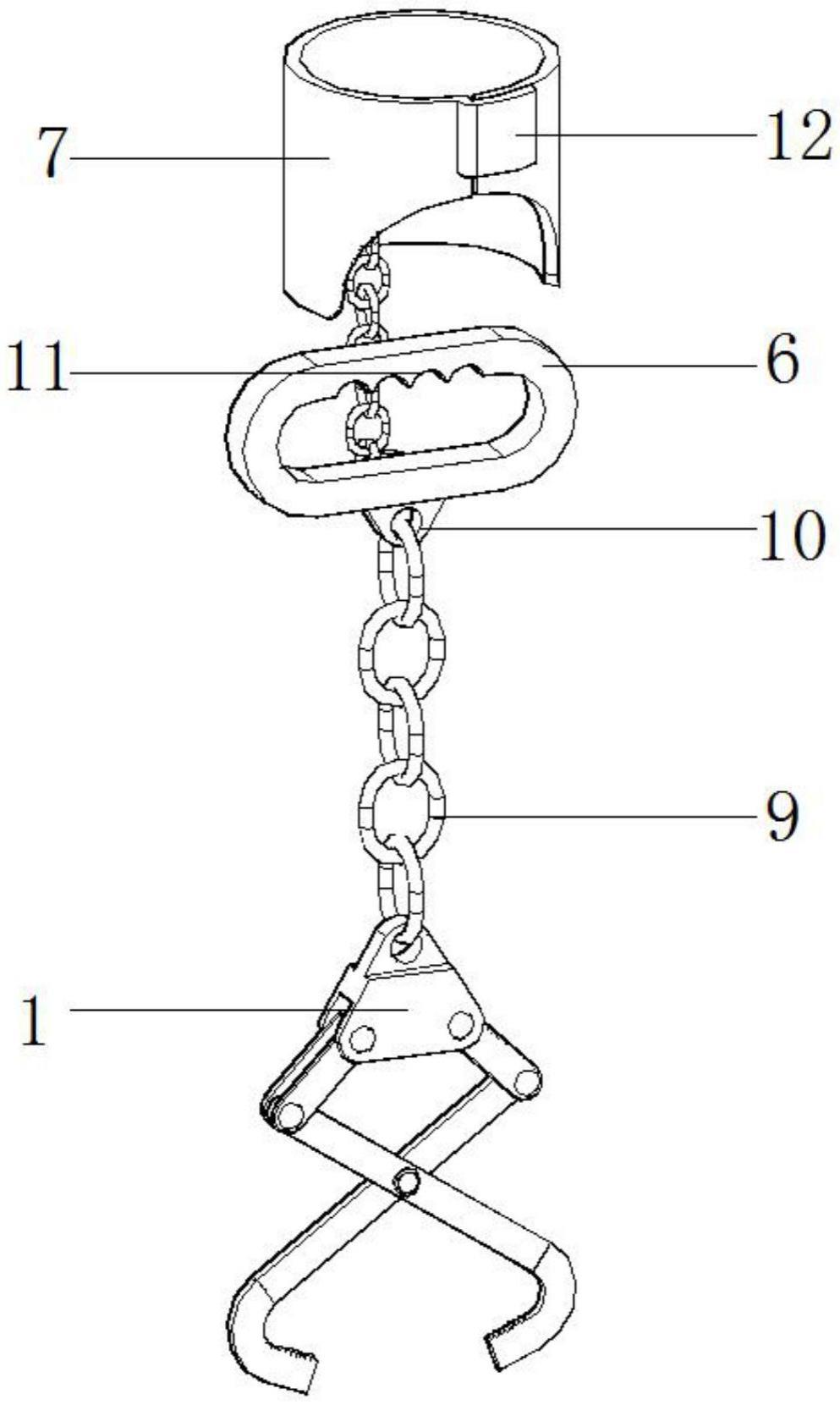
1.一种轨道搬运夹爪,包括三眼集成块(1),其特征在于,所述三眼集成块(1)顶部两侧内壁均设置有对称分布的连杆(2),且两个连杆(2)之间设置有抓杆(3),所述抓杆(3)一端外壁焊接有卡爪(4),且卡爪(4)外壁设置有防滑齿(5),所述三眼集成块(1)顶部设置有拉环(6),且拉环(6)顶部设置有护套(7)。
2.根据权利要求1所述的一种轨道搬运夹爪,其特征在于,所述三眼集成块(1)和连杆(2)之间、连杆(2)和抓杆(3)之间以及两个抓杆(3)之间均转动连接有销轴(8)。
3.根据权利要求1所述的一种轨道搬运夹爪,其特征在于,所述三眼集成块(1)顶部外壁挂接有第一锁链(9),且拉环(6)底部外壁焊接有第一连接扣(10),第一锁链(9)一端外壁挂接在第一连接扣(10)的内壁。
4.根据权利要求1所述的一种轨道搬运夹爪,其特征在于,所述拉环(6)顶部内壁开设有等距离分布的放置槽(11)。
5.根据权利要求1所述的一种轨道搬运夹爪,其特征在于,所述护套(7)外壁粘接有魔术贴(12)。
6.根据权利要求1所述的一种轨道搬运夹爪,其特征在于,所述拉环(6)一侧外壁的底部焊接有第二连接扣(13),且第二连接扣(13)内壁挂接有第二锁链(14),第二锁链(14)一端外壁挂接在护套(7)的内壁上。
7.根据权利要求1所述的一种轨道搬运夹爪,其特征在于,两个所述卡爪(4)之间呈对称分布。
技术总结
本技术属于夹爪技术领域,尤其是一种轨道搬运夹爪,针对背景技术提出的操作不方便且轨道容易脱落砸伤工作人员的问题,现提出以下方案,包括三眼集成块,所述三眼集成块顶部两侧内壁均设置有对称分布的连杆,且两个连杆之间设置有抓杆,所述抓杆一端外壁焊接有卡爪,且卡爪外壁设置有防滑齿。本技术放下卡爪时,卡爪会分离,在搬运轨道时,卡爪会紧紧卡在轨道的外壁上,方便抬起轨道,利用了简单的杠杆机械原理和重力原理实现了轨道的抬升,既简单方便,又快捷,在夹爪的上方设置了拉环和护套,工作人员可将护套穿戴在手臂上并握住拉环拉起轨道,避免了夹爪从手上脱落导致轨道砸伤手脚和身体其他部位的事故,安全性高。
技术研发人员:陆岩本,黄峰,丁超,高轩,王世财
受保护的技术使用者:华亭煤业集团有限责任公司
技术研发日:20221001
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!