一种新型平行双吊索检测机器人
本发明涉及桥梁拉索检测,具体涉及的是一种新型平行双吊索检测机器人。
背景技术:
1、吊索是拱桥、悬索桥的核心结构,是将桥面载荷传递给拱肋、主缆的关键构件,而在当今拱桥、悬索桥的工程设计中平行双吊索形式已经成为一种常见的设计形式,即在单一吊点处设置距离相近的两道平行吊索同时承受该吊点处的载荷,平行双吊杆的设计不仅能简化桥梁构造、减少锚具尺寸、便利施工,还可使得桥面系刚度和吊杆安全冗余度进一步提升,同时使得不中断交通条件下的换索、张拉施工得以实现,吊杆长期暴露于空气中,工作环境恶劣,在常年风吹雨淋、紫外线照射等自然因素以及粗放安装施工、人为损伤和交通载荷等人为因素作用下,吊杆表面的pe保护层硬化、脆裂、划痕、凹坑等表面损伤是最频发的吊杆病害形式,导致吊杆内部的金属腐蚀磨损,因此,需对桥梁吊杆外观定期进行检测,及时防范因pe护套受损而导致的吊索内部的金属暴露被腐蚀,现有的检测主要是爬索机器人通过轮式或履带式动力设计,依靠摩擦力在吊杆表面低速行进,对吊杆进行自动化外观检测,全面替代人工检测方法,可以有效降低人员高空作业风险,减少作业成本,但现有的检测机器人使用前需将本体拆解并环抱于吊杆之上后重新组合为统一整体后,再进行作业。
2、专利cn201520865940.7公开了一种轻型桥梁索杆外观检测机器人,包括用于驱动其沿着桥梁索杆行走的驱动系统、用于检测桥梁索杆外观的视觉检测系统、用于调节驱动系统对桥梁索杆夹紧力的调节杆系统、用于安装各系统的侧板骨架 ;驱动系统包括上驱动滚筒和下驱动滚筒、分别固定套置在上驱动滚筒和下驱动滚筒上的驱动滚轮组件、控制驱动滚轮组件的电机控制器 ;视觉检测系统包括有视频控制模块、数据存储器和至少一摄像头 ;调节杆系统包括用于连接上驱动滚筒和下驱动滚筒的调节螺杆和用于固定调节螺杆的模具弹簧 ;侧板骨架包括侧板和侧板连接杆。该装置采用爬索机器人对吊杆进行自动化外观检测,使用前需将本体拆解并环抱于吊杆之上后重新组合为统一整体后再进行作业,费时费力,且需安装与拆卸两次才能完成一组双吊索的检测。
技术实现思路
1、本发明的目的是提供一种能同时检测双吊杆、安装与拆卸方便、提升检测效率的新型平行双吊索检测机器人,以解决设备安装与拆卸繁琐、不能同时检测双吊杆的技术问题。
2、为了解决以上的技术问题,本发明所采用的方案如下:
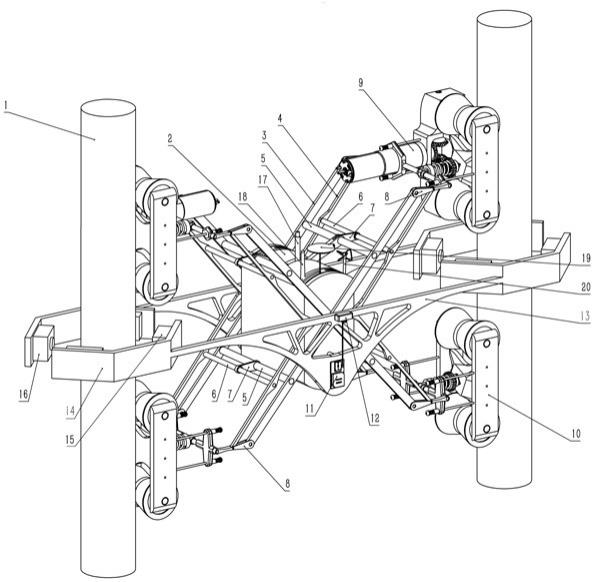
3、一种新型平行双吊索检测机器人,用于检测桥梁的平行双吊索,包括机器人主体、x形活动支架、主动轮系、从动轮系、定位装置和检测装置;所述主动轮系、从动轮系和检测装置均设有两套;所述x形活动支架上部左右两端分别安装一套所述主动轮系,下部左右两端分别安装一套所述从动轮系;所述检测装置位于所述主动轮系和所述从动轮系之间;所述定位装置与所述检测装置连接;所述机器人主体前后两侧设有定位孔和凸轴;所述x形活动支架通过所述定位孔与所述机器人主体连接;所述检测装置通过所述凸轴与所述机器人主体连接。检测机器人通过x形活动支架上部左右两套主动轮系和下部左右两套从动轮系与平行双吊杆进行摩擦接触,实现机器人在两杆之间的移动。
4、进一步的,所述机器人主体包括螺纹推杆、数传天线、gps天线、图传天线、旋臂推杆、垂向移动铰链、步进电机、gps模块、图传机载模块、数传机载模块、主控板和智能电池;
5、所述数传天线、所述gps天线、所述图传天线的一端分别与所述数传机载模块、所述gps模块、所述图传机载模块连接,另一端均延伸出所述机器人主体外部;所述智能电池位于所述机器人主体内部下端,进行供电;所述主控板位于所述智能电池左上方,所述gps模块、图传机载模块、数传机载模块均位于所述智能电池右上方,从下到上依次为数传机载模块、图传机载模块、 gps模块;所述步进电机位于所述智能电池的中上方;
6、所述螺纹推杆穿过所述垂向移动铰链与所述步进电机的输出轴连接;所述旋臂推杆一端与所述垂向移动铰链与所述旋臂推杆连接另一端与所述x形活动支架连接。螺纹推杆通过紧定螺丝与步进电机的输出轴相连实现传动,通过旋臂推杆和垂向移动铰链与x形活动支架连接,带动x形活动支架伸展运动,数传天线、gps天线、图传天线分别通过电气接口与数传机载模块、gps模块、图传机载模块进行连接,通过主控板进行数据收集、运算、指令输出等功能。
7、进一步的,所述x形活动支架设有两组x形单面活动支架,分别位于所述机械人主体的前后两侧,且两组x形单面活动支架之间均布有四套横撑装置;所述定位孔包括两个定位孔a和定位孔b;
8、所述x形单面活动支架设有两根主旋臂、四根副旋臂和四根旋臂末端连杆;两根所述主旋臂成“x”形连接,且连接处通过销轴和所述定位孔b与所述机械人主体铰接;所述主旋臂的上下两端分别连接一根所述旋臂末端连杆,所述旋臂末端连杆的另一端与所述主动轮系或者所述从动轮系连接;两根所述副旋臂的一端相互连接,并通过所述定位孔a与所述机器人主体连接,另一端与所述旋臂末端连杆的中部连接;
9、所述横撑装置包括主旋臂横撑、副旋臂横撑、横撑连杆;所述横撑连杆两端分别与所述主旋臂横撑、所述副旋臂横撑中部连接;所述主旋臂横撑的两端分别与主旋臂连接;所述副旋臂横撑的两端分别与所述副旋臂连接。“x”形连接的主旋臂和副旋臂方便调整左右两侧轮系间距,使左右两侧的轮系紧压在两侧吊杆上,保证设备不滑落,横撑连杆进一步加固主旋臂横撑和副旋臂横撑。
10、进一步的,所述主动轮系包括带刹车有刷电机、齿轮减速器、主动轮定位缓冲装置、主动轮异形压杆、主动轮h型连接盘、传动箱、主动轮后盖和主动转轮装置;
11、所述主动轮h型连接盘左右两侧分别与所述传动箱、所述主动轮后盖连接;所述主动转轮装置设有两个,分别位于所述主动轮h型连接盘前后两侧;所述主动转轮装置包括主动橡胶轮和主动轮轴;所述主动轮轴贯穿所述主动橡胶轮,一端伸入所述传动箱的内部,另一端与所述主动轮后盖连接;所述齿轮减速器一端伸入所述传动箱的内部,另一端与所述刷电机连接;
12、所述主动轮定位缓冲装置设有三套,其中两套底端与所述传动箱连接,另一套底端与所述主动轮后盖连接;所述主动轮定位缓冲装置包括主动轮止压弹簧、主动轮直线轴承和主动轮光滑导杆;所述主动轮光滑导杆由上到下依次贯穿所述主动轮止压弹簧、主动轮直线轴承和主动轮异形压杆;所述主动轮系通过所述主动轮异形压杆与所述x形活动支架连接。带刹车有刷电机提供动力,其输出轴的力矩通过齿轮减速器向下传递到传动箱上,通过主动轮轴带动主动橡胶轮转动,直线轴承和主动轮光滑导杆之间的主动轮止压弹簧,方便主动轮异形压杆沿主动轮光滑导杆做直线运动使进行缓冲。
13、进一步的,所述传动箱设有四个轴承、七个等比锥齿轮和两个等比传动轴;七个所述等比锥齿轮两两相邻,并相互啮合组成四组齿轮副;所述等比传动轴通过两端的所述轴承安装在传动箱内部;七个所述等比锥齿轮中,有一个所述等比锥齿轮安装在所述齿轮减速器的输出端上,有两个所述等比锥齿轮分别固定在所述主动轮轴上,剩下四个所述等比锥齿轮两两安装在两个所述等比传动轴上;所述传动箱的内部结构成对称性安装。带刹车有刷电机提供的动力通过传动箱内部的四组齿轮副和等比传动轴向两侧传递至主动轮轴上,带动与主动轮轴连接的主动橡胶轮转动,等比传动轴通过两端的轴承进行限位与固定。
14、进一步的,所述主动轮系设有动轮避震器和主动轮压力传感器;所述主动轮压力传感器设在所述主动轮避震器的底部并且紧压在所述主动轮h型连接盘上;所述主动轮避震器(9-7)的下部还设有主动轮预紧螺母(9-8);所述主动轮避震器(9-7)顶端套装在所述主动轮异形压杆中部。主动轮预紧螺母调整主动轮避震器的弹簧预紧力,主动轮压力传感器能获取主动轮系对于索体表面的正压力值,通过动轮避震器提升机体越障时的机体平稳性。
15、进一步的,所述从动轮系包括四组从动轮定位缓冲装置、从动轮异形压杆、从动轮h型连接盘、两个从动轮侧盖和两组从动转轮装置;所述从动轮h型连接盘左右两侧分别与所述从动轮侧盖连接;所述从动转轮装置位于所述从动轮h型连接盘前后两侧;所述从动转轮装置包括从动橡胶轮和从动轮轴;所述从动轮轴贯穿所述从动橡胶轮,且两端分别与两个所述从动轮侧盖连接;四组所述从动轮定位缓冲装置均布在两个所述从动轮侧盖上;
16、所述从动轮定位缓冲装置包括从动轮止压弹簧、从动轮直线轴承和从动轮光滑导杆;所述从动轮光滑导杆由上到下依次贯穿所述从动轮止压弹簧、所述直线轴承、所述从动轮异形压杆与所述从动轮侧盖连接。x形活动支架上部的主动轮系带动下部的从动轮系转动,从动轮侧盖与从动轮h型连接盘螺纹连接,两个从动轮侧盖之间从动橡胶轮通过从动轮轴转动,从动轮直线轴承和从动轮光滑导杆之间的从动轮止压弹簧,作为从动轮异形压杆沿从动轮光滑导杆做直线运动的缓冲器。
17、进一步的,所述从动轮系设有从动轮避震器和从动轮压力传感器;所述从动轮压力传感器设置在从动轮避震器的底部并且紧压在所述从动轮h型连接盘上;所述从动轮避震器的下部还设有从动轮预紧螺母;所述从动轮避震器的顶部套装在所述从动轮异形压杆中部。从动轮预紧螺母调整从动轮避震器的弹簧预紧力,从动轮压力传感器能获取从动轮系对于索体表面的正压力值,通过从动轮避震器提升机体越障时的机体平稳性。
18、进一步的,所述定位装置包括uwb信号处理模块和uwb信号天线;所述uwb信号天线与所述uwb信号处理模块连接;所述uwb信号处理模块固定安装在所述检测装置上。通过uwb信号处理模块和uwb信号天线获取高精度局部定位信息。
19、进一步的,所述检测装置包括两组安装装置和两组观察设备;所述凸轴包括凸轴a和凸轴b;两组所述安装装置通过所述机器人主体前后两侧的的凸轴a和凸轴b与机器人主体连接;所述安装装置包括载荷挂载架和两个相机安装支座;所述观察设备包括两个内侧高清相机和两个外侧高清相机;所述相机安装支座呈弧形;所述载荷挂载架两端均与相机安装支座固定连接,所述相机安装支座内壁两端分别与所述内侧高清相机、所述外侧高清相机连接。所述载荷挂载架位于所述机器人主体前后侧,每个所述载荷挂载架通过前后两面上的凸轴a和凸轴b与机器人主体连接。载荷挂载架的相机安装支架上的内侧高清相机和外侧高清相机能够准确捕捉索体表面图像,获取索体表面病害信息。
20、本发明的工作原理如下:
21、将两组x形单面活动支架通过机器人主体前后两侧的定位孔a和定位孔b与机器人主体销轴铰接,通过凸轴a和凸轴b安装检测装置,安装好x形活动支架和检测装置后,人为调整x型活动支架初步适应平行双吊索的间距,遥控控制步进电机正向转动,通过螺纹推杆带动垂向移动铰链向上移动,同步带动旋臂推杆往外伸张,使x型活动支架系伸展,通过其上部左右两端主动轮系和下部左右两端从动轮系与平行双吊索的接触,通过轮系与索体之间的摩擦力实现机体沿索体的前后移动,通过检测装置上安装的内侧高清相机和外侧高清相机获取索体表面病害信息,定位装置通获取机体的局部定位信息,获取的数据信息通过机器人主体内部的传输系统传递的地面的站点,实时反馈机器人的采集数据。
22、本发明的有益效果如下:
23、1.本发明通过与机器人主体连接的x形活动支架的主动轮系和从动轮系与两侧平行的吊索接触,通过主动轮系和从动轮系之间的检测装置可对两侧的吊索进行检测,方便对常见平行双吊索结构的同步检测,避免了传统爬索机器人需要拆装两次才能完成双吊索检测的作业模式,成倍提升了双吊索的自动化检测作业效率。
24、2.本发明通过x形活动支架的主旋臂横撑与机器人主体的旋臂推杆和螺纹推杆上的垂向移动铰链连接,可通过电机旋转带动x形活动框架的内缩与外扩调整,方便机器人进行固定和移动,同时方便机器人的快速拆装。
25、3.本发明的x型活动支架系的每条斜边结构均采用平行四边形设计,能保证左右两侧轮系向内收缩或向外扩张同步性,还能保证机体始终平行于索体方向,且支架末端的旋臂末端连杆能够始终垂直索体方向,继而确保支架系传递给轮系的力始终垂直作用于轮系中两轮构成的平面,确保力的最大效率传递。
26、4.本发明的检测装置设有两个内侧高清相机和两个外侧高清相机,能准确捕捉索体表面图像,方便对吊索进行全方位检测损伤。
27、5.本发明主动轮系和从动轮系全部设有独立的避震器,能有效提升机体越障时的机体平稳性,通过调节主动轮预紧螺母和从动轮预紧螺母,可人为调节主动轮系与从动轮系的避震特性。
28、6.本发明的定位装置、gps天线和gps模块能获取全局高精度定位信息;通过机械人主体内部的数传天线、数传机载模块、图传天线和图传机载模块传递采集数据,方便工作人员在地面观察。
29、7.本发明通过主动轮系和从动轮系上设置的压力传感器来获取轮系对索体的压力值,结合电机的驱动作用,可对爬行摩擦力进行实时反馈控制,确保机体不划落,并且拥有足够摩擦力沿索体爬行,方便控制、调节装置的运动速度。
- 还没有人留言评论。精彩留言会获得点赞!