定位臂的制作方法
1.示例实施例涉及一种定位臂。
背景技术:
2.在医疗、工业等多个领域中会使用机器人。例如在医疗领域中,作为手术机器人系统的一部分,会使用包括定位臂(positioning arm)的支撑装置,由此来自由且稳定地对手术用具(surgical instrument)以及机械臂(robot arm)进行定位。
3.通常多使用具有旋转自由度的定位臂,并广泛应用于腹腔镜手术机器人和达芬奇系统(da vinci system)等手术机器人。定位臂自身的重量或加载(loading)在定位臂上的仪器(instrument)等的重量会作用在定位臂的关节上,随之产生重力扭矩(gravitational torque)。重力扭矩可能会改变定位臂的姿势,因此需要不断施加恒定的力来使定位臂的姿势保持不变。例如,可以由用户提供支撑定位臂的力,或者使用电机等致动器来提供连续扭矩,或者使用制动器来进行固定。
4.然而由于定位臂的重量,使用者在持续提供力的同时进行手术非常困难,并且所能承受的定位臂重量有限。另外,即使使用电机等致动器,也存在施加过大负载的问题,为解决这一问题常会导致价格提高、体积变大、相对于体积效率低下的问题。使用制动器进行固定的方式时,需要松开和拉紧制动器,这一过程会降低使用便利性,并且在松开制动器来调整定位臂位置时,仍需要人为承受定位臂的重量。因此,需要一种用于补偿定位臂自身重量的重力补偿装置。
5.上述背景技术中的内容为发明人在开发本发明的过程中掌握或习得的内容,不应被理解为必须是申请本发明前公开的一般公知技术。
技术实现要素:
6.技术问题
7.此方面提供一种定位臂,该定位臂采用针对三自由度运动的重力补偿机制。
8.技术方案
9.根据一实施例的定位臂,包括:连杆组件,其具有可沿通过距离一点规定距离的远程运动中心(rcm)的虚拟轴进行平移的平移连杆,并且,以所述一点为中心在至少两个方向上旋转;以及重力扭矩补偿部,其提供补偿扭矩,所述补偿扭矩的方向与所述连杆组件的自身重量作用于所述一点的重力扭矩的方向相反。
10.所述连杆组件可以滚动旋转及俯仰旋转,并且所述平移连杆不受滚动旋转角及俯仰旋转角的影响,可沿着通过所述远程运动中心的虚拟轴平移。
11.所述连杆组件,还包括:齿轮箱,其可相对于底部滚动旋转;俯仰连杆,其可相对于所述齿轮箱俯仰旋转;平行连杆,其可按照与所述俯仰连杆的长度方向平行的姿势运动;以及连接杆,其连接所述俯仰连杆与所述平行连杆,所述平移连杆可沿位于所述平行连杆的引导件平移。
12.所述定位臂,还包括:中心锥齿轮,其固定于所述底部;一对旋转锥齿轮,其分别啮合在所述中心锥齿轮的两侧,可相对于所述齿轮箱旋转;以及一对旋转体,其分别固定于所述一对旋转锥齿轮,可分别与所述一对锥齿轮一同相对于所述齿轮箱旋转。
13.在所述一对旋转锥齿轮及与其对应的一对旋转体之间分别形成有连接轴部,所述连杆组件以能够向一个方向旋转的方式设置于所述连接轴部。
14.所述一对旋转锥齿轮在所述连杆组件俯仰旋转时不会发生相对移动,在所述连杆组件滚动旋转时相对于同一个轴反向旋转。
15.所述重力扭矩补偿部包括一对弹性体,其根据所述连杆组件的滚动旋转或俯仰旋转改变长度,由此提供生成所述补偿扭矩的弹力。
16.所述重力扭矩补偿部,还包括:支撑台,其位于所述一对弹性体的一侧;一对滑块,其位于所述一对弹性体的另一侧,可相对于所述俯仰连杆滑动;一对补偿钢线,其一侧分别固定于所述一对旋转体,另一侧分别固定于所述一对滑块。
17.所述定位臂还包括重力扭矩调整部,其减小随着所述平移连杆的平移距离而产生的所述重力扭矩与所述补偿扭矩之间的差异。
18.所述支撑台包括支撑部,其配置在所述一对补偿钢线经过的路径侧方,起到从所述一对补偿钢线接收所述补偿扭矩的功能,所述重力扭矩调整部在所述平移连杆朝向所述远程运动中心平移时,降低所述支撑台,从而减小所述补偿扭矩的力臂长度,在所述平移连杆向远离所述远程运动中心的方向平移时,提高所述支撑台,从而增大所述补偿扭矩的力臂长度。
19.所述支撑台设置成可相对于所述俯仰连杆滑动的方式,所述重力扭矩调整部包括调整钢线,所述调整钢线相互连接所述平移连杆与所述支撑台,从而在所述平移连杆平移时滑动所述支撑台。
20.所述重力扭矩调整部还包括变速手段,其以与所述平移连杆相对于所述平行连杆的平移距离成比例的方式来增减所述支撑台相对于所述俯仰连杆的滑动距离。
21.所述调整钢线包括分别连接于所述变速手段的一侧及另一侧的第一调整钢线及第二调整钢线,所述变速手段,包括:第一卷筒,其供所述第一调整钢线绕卷;第二卷筒,其供所述第二调整钢线绕卷;以及减速器,其使得所述第二卷筒以设置旋转比相对于所述第一卷筒旋转。
22.所述定位臂还包括重力扭矩调整部,其减小随着所述平移连杆的平移距离而产生的所述重力扭矩与所述补偿扭矩之间的差异。
23.根据一实施例的定位臂,包括:连杆组件,其可以滚动旋转及俯仰旋转,并具有可沿通过距离一点规定距离的远程运动中心(rcm)的虚拟轴进行平移的平移连杆;以及多个锥齿轮,其在所述连杆组件俯仰旋转时不会发生相对运动,在所述连杆组件滚动旋转时啮合旋转;旋转体,其连接于所述多个锥齿轮中的一个以上,与所述锥齿轮一起旋转;以及重力扭矩补偿部,其连接至所述旋转体,并随着所述连杆组件的滚动旋转及俯仰旋转使弹性体变形,由此来提供补偿扭矩,所述补偿扭矩的方向与因所述连杆组件的自身重量的重力扭矩相反。
24.所述定位臂还包括重力扭矩调整部,其根据所述平移连杆的平移来增减所述补偿扭矩的力臂长度,由此缩小所述重力扭矩与所述补偿扭矩之间的差异。
25.发明的有益效果
26.根据一实施例的定位臂通过利用重力补偿机制,可以用很小的力进行操作。换言之,可以通过重力补偿机制来减小应施加至驱动源头的输入扭矩,因此,可以使用相对较小较轻的致动器来进行驱动,减少单纯用于补偿重力的能量消耗,提高能量效率。
27.并且,即使在使用定位臂的过程中出现断电的紧急状况,定位臂也不会因重力作用而下沉,尤其可以提高手术机器人领域等的安全性。
28.根据一实施例的定位臂具备重力补偿机制,该机制可以针对随着定位臂端部的滚动(roll)、俯仰(pitch)及平移的三自由度运动而变化的重心变化,在半球形工作空间(hemispheric work space)中不受重力影响,可以稳定地保持多种姿势。因此,可以广泛用于支点(fulcrum)运动的微创外科手术(minimally invasive surgery)等手术机器人中。
附图说明
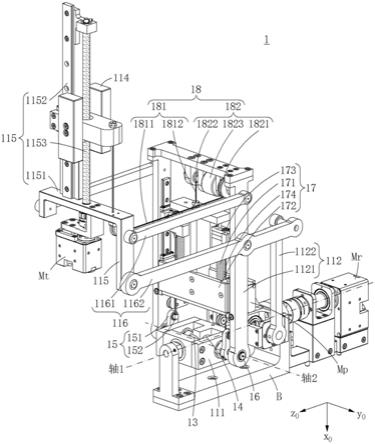
29.图1是根据一实施例的定位臂的立体图。
30.图2是概念化地显示根据一实施例的定位臂的侧面图。
31.图3是显示根据一实施例的定位臂的俯仰旋转、平移连杆的平移的附图。
32.图4是简略显示根据一实施例的定位臂向前方俯仰旋转90度的状态下的一部分的平面图。
33.图5是显示根据一实施例的定位臂的俯仰旋转的附图。
34.图6至图8是显示根据一实施例的定位臂的滚动旋转的附图。
35.图9及图10是显示根据一实施例的平移连杆在平移时的重力扭矩调整部的动作的附图。
36.图11是根据一实施例的定位臂的概念图。
37.图12a是根据一实施例示出的重力扭矩调整部的附图。
38.图12b是示出图12a的部分a的放大图。
39.图13是根据一实施例示出的重力扭矩调整部的附图。
具体实施方式
40.下面,参照示例附图对实施例进行详细说明。在对各附图中的构成要素赋予附图标记时,相同的构成要素即使表示在不同的附图中,也尽可能使用相同的附图标记。在说明实施例的过程中,当判断对于相关公知技术的具体说明会不必要地混淆实施例时,省略其详细说明。
41.并且,在说明实施例的构成要素时,可以使用第一、第二、a、b、(a)、(b)等术语。这些术语仅用于将一构成要素区别于其他构成要素,并不用于限制相应构成要素的本质或顺序等。例如,第一构成要素可以被称为第二构成要素,并且类似地,第二构成要素也可以被称为第一构成要素。此外,应当理解,当说明书中说明一个构成要素“连接”、“结合”或者“接触”另一个构成要素时,第三构成要素可以“连接”、“结合”或者“接触”在第一构成要素和第二构成要素之间,尽管第一构成要素能够是直接连接、结合或接触第二构成要素。
42.当一个构成要素与某一实施例的构成要素具有共同功能,在其他实施例中也使用相同名称对该构成要素进行说明。在没有言及反例的情况下,某一实施例的说明能够适用
于其他实施例,对重复内容省略具体说明。
43.图1是根据一实施例的定位臂的立体图;图2是概念化地显示根据一实施例的定位臂的侧面图;图3是显示根据一实施例的定位臂的俯仰旋转、平移连杆的平移的附图;图4是简略显示根据一实施例的定位臂向前方俯仰旋转90度的状态下的一部分的平面图。
44.参照图1至图4,根据一实施例的定位臂1的端部114可以相对于底部b至少实现三自由度,具体为滚动(roll)旋转、俯仰(pitch)旋转以及平移。图1至图4所示的坐标系(x0,y0,z0)是以滚动旋转轴(轴1)以及俯仰旋转轴(轴2)相交的“一点”为原点的全球坐标系,并且将x0轴设置为了重力方向。
45.定位臂1具有一种手段,该手段提供与作用于一点的重力扭矩相反的补偿扭矩,由此可以减少用于保持定位臂1姿势所需的动力。定位臂1可以包括连杆组件11、中心锥齿轮13、旋转锥齿轮14、旋转体15、连接轴部16、重力扭矩补偿部17,以及重力扭矩调整部18。
46.连杆组件11具有沿着通过离一点规定距离的远程运动中心(remote center of motion,rcm)的虚拟轴平移的平移连杆114,并且,可以以一点为中心在至少两个方向上旋转。例如,连杆组件11可以滚动旋转及俯仰旋转,并且平移连杆114可以不受滚动旋转角及俯仰旋转角影响,沿着通过远程运动中心(rcm)的轴线平移。连杆组件11可以包括齿轮箱111、俯仰连杆112、平移连杆114、平行连杆115以及连接杆116。
47.齿轮箱111可以相对于底部b滚动旋转。例如,齿轮箱111可旋转地连接于对中心锥齿轮13及底部b进行连接的连接轴部(未赋予附图标记)。齿轮箱111具有供多个锥齿轮13、14的旋转轴贯穿的结构,并支撑旋转锥齿轮14与中心锥齿轮13的啮合。
48.俯仰连杆112可以相对于齿轮箱111俯仰旋转。例如,俯仰连杆112可以可旋转地连接于对旋转锥齿轮14及旋转体15进行连接的连接轴部16。例如,俯仰连杆112可以包括互相平行设置的第一俯仰连杆1121及第二俯仰连杆1122。
49.平移连杆114可以相对于底部b滚动旋转及俯仰旋转,并沿着通过远程运动中心(rcm)的虚拟轴进行平移。例如,平移连杆114可以沿着位于平行连杆115的引导件1152实现平移。图1中简单示出了平移连杆114,也可以如图2及图3等,在平移连杆114等设置需要体现的各种手术用具(e)等远程运动中心(rcm)的各种装备。
50.平行连杆115能够以相对于俯仰连杆112的长度方向平行的姿势运动。平行连杆115可以包括连接在连接杆116的横杆1151;以及设置于横杆1151垂直方向,用于引导平移连杆114的引导件1152。
51.连接杆116可以连接俯仰连杆112与平行连杆115。连接杆116可以设置成与对第一俯仰连杆1121的旋转轴及第二俯仰连杆1122的旋转轴进行连接的虚拟线平行。例如,连接杆116可以包括互相平行的第一连接杆1161及第二连接杆1162。俯仰连杆112可以设置成与对第一连接杆1161的旋转轴及第二连接杆1162的旋转轴进行连接的虚拟线平行。
52.基于连杆组件11的上述结构,俯仰连杆112、平行连杆115及连接杆116可以实现类似平行四边形的四杆机构(4
‑
bar linkage)的运动。因此,如图2及图3所示,平移连杆114可以不受定位臂1的俯仰旋转角的影响,沿着通过远程运动中心(rcm)的虚拟轴实现平移。并且,当滚动旋转轴(轴1)及俯仰旋转轴(轴2)在相同一点相交时,平移连杆114仍可以不受定位臂1的滚动旋转角的影响,沿着通过远程运动中心(rcm)的同一个虚拟轴实现平移。
53.中心锥齿轮13固定于底部b,从而不会相对于底部b旋转。
54.一对旋转锥齿轮14可以分别在中心锥齿轮13的两侧啮合,并相对于齿轮箱111的特定位置旋转。
55.基于上述结构,多个锥齿轮13、14在连杆组件11俯仰旋转时不会发生相对移动(参照图5),当连杆组件11滚动旋转时可以相互啮合旋转(参照图6至图8)。多个锥齿轮13、14可以具有例如1:1的传动比。
56.旋转体15可以连接在多个锥齿轮13、14中的一个以上,并与锥齿轮13、14一起旋转。例如,一对旋转体15可以分别固定于一对旋转锥齿轮14,分别与一对旋转锥齿轮14一同相对于齿轮箱11旋转。旋转体15可以包括凸轮151及连接口152,其中,凸轮151固定在连接轴部16,并以与其对应的旋转锥齿轮14相同的角度旋转;连接口152从连接轴部16分离,可旋转地设置于凸轮151。在连接口152可以连接后述的补偿钢线174。
57.连接轴部16可以分别形成在一对旋转锥齿轮14及与其对应的一对旋转体15之间,连杆组件11以能够朝一个方向旋转的方式设置在连接轴部16。
58.重力扭矩补偿部17可以提供补偿扭矩,该补偿扭矩的方向与连杆组件11的自身重量作用于一点的重力扭矩的方向相反。例如,重力扭矩补偿部17可以随着连杆组件11的滚动旋转和/或俯仰旋转来改变弹性体171的长度,由此提供补偿扭矩。例如,重力扭矩补偿部17可以包括一对弹性体171、支撑台172、一对滑块173及一对补偿钢线174。
59.如图所示,一对弹性体171可以是压缩弹簧,然而并不一定受限于此,应当理解,本领域普通技术人员可以使用压缩弹簧之外的其他公知的多种弹性手段。
60.支撑台172可以位于一对弹性体171的一侧来支撑一对弹性体171的端部。支撑台可以包括配置在补偿钢线174通过的路径侧方的支撑部(1721,参照图12a及图12b)。支撑部1721所起到的作用是接触补偿钢线174来接收从补偿钢线174传递的补偿扭矩。例如,支撑部172可以是滚轴,由此不会妨碍补偿钢线174的运动。一方面,支撑台172可相对于俯仰连杆112滑动,由此还可与重力扭矩调整部18相互作用,对此,将在后面进行说明。
61.一对滑块173可以位于一对弹性体171的另一侧。换言之,支撑台172与滑块173以弹性体171为基准位于两侧。一对滑块173可以分别相对于俯仰连杆112滑动,这样能够根据支撑台172及滑块173之间的间距变化来确定弹性体171的变形量,由此来改变施加至补偿钢线174的张力。
62.一对补偿钢线174的一侧可以分别固定在一对旋转体15上,另一侧分别固定在一对滑块173上。可以通过补偿钢线174来联动旋转体15的旋转角度,由此调节一对滑块173的位置。并且,补偿钢线174可以贯穿支撑台172,由此,施加至补偿钢线174的部分张力可以提供将支撑台172沿着俯仰方向旋转的扭矩。总结起来,根据一对滑块173与支撑台172之间的距离,可以改变补偿钢线174提供至支撑台172及连接于其的俯仰连杆112的补偿扭矩。
63.重力扭矩调整部18可以减小随着平移连杆114的平移距离而产生的重力扭矩与补偿扭矩之间的差异。重力扭矩调整部18可以在平移连杆114朝向远程运动中心(rcm)平移时(即,连杆组件11的转动惯量减小时),减小弹性体171的弹性势能;在平移连杆114朝向远离远程运动中心(rcm)的方向平移时(即,连杆组件11的转动惯量增大时),增大弹性体171的弹性势能。重力扭矩调整部18可以包括调整钢线181及变速手段182。
64.调整钢线181可以连接平移连杆114与支撑台172,由此,支撑台172可以在平移连杆114平移时滑动。例如,调整钢线181可以包括连接在平移连杆114与变速手段182之间的
第一调整钢线1811;以及连接在变速手段182与支撑台172之间的第二调整钢线1812。
65.变速手段182设置在调整钢线181上,并且与平移连杆114对于平行连杆115的平移距离成比例地来增减支撑台172相对于俯仰连杆112的滑动距离。例如,变速手段可以包括供第一调整钢线1811绕卷的第一卷筒1821;供第二调整钢线1812绕卷的第二卷筒1822,以及使得第二卷筒1822以设置旋转比相对于第一卷筒1821旋转的减速器1823。
66.其中,如将通过图12a及图13在后面说明,所设定的设置旋转比是考虑了弹性体171的弹性模量等给定的设计规范,可以最小化重力扭矩与补偿扭矩之间的差异的设置旋转比。
67.同时,定位臂1可以用作主从手术系统(mater
‑
slave)的从机械手。例如,定位臂1还可以包括滚动旋转电机m_r,用于对连杆组件11进行滚动旋转;俯仰电机m_p,用于对连杆组件11进行俯仰旋转;以及平移电机m_t,用于对平移连杆114进行平移。
68.例如,滚动旋转电机m_r可以连接到基座b来滚动旋转齿轮箱111。俯仰旋转电机m_p与齿轮箱111一起旋转,并且可以相对于齿轮箱111对俯仰连杆112进行俯仰旋转。平移电机m_t可以安装在平行连杆115上,并相对于平行连杆115对平移连杆114进行平移。例如,平行连杆115可包括能够以滚珠丝杠方式移动平移连杆114的螺旋轴1153。
69.图5是显示根据一实施例的定位臂的俯仰旋转的附图。为方便理解,图5中省略了齿轮箱111。
70.在进行说明之前,首先,参照图5所示的坐标系对本说明书中所有附图中记载的坐标系进行说明。首先,x0,y0,z0坐标系是固定于底部b的全球坐标系(global coordinate system)。x1,y1,z1坐标系是以z0轴为基准旋转滚动旋转角θ1的坐标系;x2,y2,z2坐标系是以y1轴为基准旋转俯仰旋转角θ2的坐标系。所述三个坐标系的原点位置均为连杆组件11的滚动旋转及俯仰旋转的重心。由此,可以将x2,y2,z2坐标系理解为固定在俯仰连杆112的局部坐标系(local coordinate system)。
71.参照图1至图5,当俯仰连杆112在x1、y1、z1坐标系上俯仰旋转θ2角度时,即俯仰连杆112相对于齿轮箱111以一对锥齿轮14的连接轴部16为中心俯仰旋转时,一对旋转锥齿轮14啮合至固定的中心锥齿轮13,由此不会发生相对移动。
72.其结果,当连杆组件11俯仰旋转时,随着旋转体15与俯仰连杆112之间的角度增大,连接口152与支撑台172之间的角度增大。由此,滑块173通过补偿钢线174的张力被拉至支撑台172侧,其结果弹性体171得到压缩,使得施加至补偿钢线174的张力增加相当于弹性体171的弹力的程度。如前所述,施加至补偿钢线174的张力可以提供与由连杆组件11的自身重量引起的重力扭矩相反方向的补偿扭矩。上述根据俯仰旋转产生的姿势变化带来的重力补偿过程可以参照现有研究论文"static balancing of a manipulator with hemispherical work space",advanced intelligent mechatronics(aim),2010ieee/asme international conference on(“具有半球工作空间的机械手的静态平衡”,2010年ieee/asme先进智能机电一体化国际会议)。
73.图6至图8是显示根据一实施例的定位臂的滚动旋转的附图。图6显示出了当以z1轴为中心来滚动旋转连杆组件11时,一对旋转锥齿轮14及旋转体15各自的旋转方向,图7及图8显示了当实际将连杆组件11滚动旋转角度θ1时变化的模样。
74.参照图6至图8,当齿轮箱111相对于底部b,以中心锥齿轮13的连接轴部为中心滚
动旋转时,一对旋转锥齿轮14以作为固定的中心锥齿轮13的中心轴z_0轴为中心,以与齿轮箱111相同的滚动旋转角θ1公转(revolution)。其结果,一对旋转锥齿轮14以作为一对旋转锥齿轮14的中心轴的y_1轴为中心,向相反方向分别自转(rotation)角度θ1m及θ2m。
75.由此,在图8中位于左侧的旋转体15,在图7中旋转至右侧,其结果,与其对应的弹性体171的弹性势能变化,由此,改变以z0轴为基准顺时针方向作用的补偿扭矩t2。
76.与此相同,在图8中位于右侧的旋转体15,在图7中旋转至左侧,其结果,与其对应的弹性体171的弹性势能变化,由此,改变以z0轴为基准逆时针方向作用的补偿扭矩t1。
77.总的来说,补偿扭矩t1及t2的总扭矩可以补偿重力扭矩。上述根据滚动旋转产生的姿势变化带来的重力补偿过程可以参照现有研究论文"static balancing of a manipulator with hemispherical work space",advanced intelligent mechatronics(aim),2010ieee/asme international conference on(“具有半球工作空间的机械手的静态平衡”,2010年ieee/asme先进智能机电一体化国际会议)。
78.以上,参照图5至图9,对根据连杆组件11的滚动旋转角θ1及俯仰旋转角θ2的变化来提供补偿扭矩的原理进行了说明。然而,如图中实施例所示,即使连杆组件11的滚动旋转角θ1及俯仰旋转角θ2不发生变化,当构成连杆组件11的部分配件(114:平移连杆)相对于其他配件发生相对移动时,由原点到连杆组件11的整体重心的力臂长度会发生变化,因此,参照现有研究论文的内容,无法补偿基于该变化的重力扭矩。下面,对在上述情况下也能够缩小重力扭矩与补偿扭矩之间差异的重力扭矩调整部18进行说明。
79.图9及图10是显示根据一实施例的平移连杆在平移时的重力扭矩调整部的动作的附图。图9是定位臂的部分构成在图1的状态下的正面图,图10是平移连杆在图9的状态下远离远程旋转中心(rcm)的状态的附图。
80.参照图9及图10,根据一实施例的定位臂1的结构是随着平移连杆114远离远程运动中心(rcm),即,随着连杆组件11相对于原点的转动惯量增大,连接在调整钢线181的支撑台172向远离原点的方向滑动。由此,滑块173与支撑台172之间的距离缩短,其结果,弹性体171的变形量增大。并且,从一点(滚动旋转轴及俯仰旋转轴相交的点)到支撑部(172,参照图2)的距离h会增大相当于支撑台173的上升距离的程度。随着距离h的增加,补偿钢线174向连杆组件11提供的补偿扭矩的力臂长度增加。其结果,补偿扭矩随着平移连杆114远离远程运动中心(rcm)而增加,由此,重力扭矩调整部18可以缩小随着平移连杆114的平移而发生变化的重力扭矩与补偿扭矩之间的差异。
81.根据上述实施例,可以提供对应于滚动旋转,俯仰旋转及平移,即三种运动的重力扭矩的变化而发生变化的补偿扭矩。下面,通过概念图来对随着所述三种运动而产生的补偿扭矩的有效性进行理论说明,进一步地,对能够更加准确地补偿重力扭矩变化的结构和/或条件进行说明。
82.图11是根据一实施例的定位臂的概念图。在图11中省略了重力扭矩调整部18。
83.参照图11,可以通过模型来显示根据一实施例的定位臂1,在该模型中,以可相互滑动的方式连接的三个质量体m1、m2、m3相对于原点o运动。此时,(i)第一质量体m1对应于俯仰连杆112;(ii)第二质量体m2对应于平行连杆115、连接杆116、重力扭矩补偿部17及重力扭矩调整部18;(iii)第三质量体m3对应于平移连杆114。三个质量体m1、m2、m3的重心距离分别是l1、l2及l3。
84.并且,弹性体171由零长弹簧(zero
‑
length spring)模型显示,并且弹性模量是k。对本领域普通技术人员而言,应当理解可以按照前面图示实施例的方式来实现零长弹簧模型。
85.一方面,h1、h及b的定义如下:
86.‑
h1:在x1
‑
z1平面坐标系中,从原点o到零长弹簧模型一端的距离
87.‑
h:在x1
‑
z1平面坐标系中从原点o到零长弹簧模型另一端的距离
88.‑
b:在x1
‑
z1平面坐标系中,从零长弹簧模型k的另一端到第二质量体m2的距离
89.其中,h1是常量,该常量与从连接轴部16到连接口152的距离相同。h是变量,该变量是在初始值h1上加上支撑台172相对于俯仰连杆112的平移距离(δh=δl2)。b是从第二质量体m2的重心距离l2中减去变量h后的常量。
90.首先,为了补偿俯仰旋转时的重力扭矩,定位臂1的整体势能之和应是不受俯仰旋转角θ2影响的常量。将三个质量体m1,m2,m3之和设为m,三个质量体m1,m2,m3的全部重心距离设为1时,如下面的公式1,定位臂1的全部势能之和表示为弹性势能与重力势能之和。
91.公式1
[0092][0093]
可知,首先需要从公式1整理所得结果的第一个项开始满足的条件。在所述条件中带入重心公式,得到下面的公式2。
[0094]
公式2
[0095][0096]
从公式2中可知,第三质量体m3的重心距离l3的变化量δl3应与前面定义的h的变化量(δh=δl2)成比例(δl2∝
δl3)。换言之,在所采用的结构中,平移连杆114相对于俯仰连杆112的平移距离与支撑台172相对于俯仰连杆112的平移距离成比例增减,根据实施例,可知能够满足相应条件。
[0097]
图12a及图13是说明根据一实施例的重力扭矩调整部的附图。
[0098]
参照图12a及图13,通过下面的公式计算根据滚动旋转角θ_r及俯仰旋转角θ_p的重力扭矩,可将符合其的弹性体171的弹性常数k与减速器1823的设置旋转比(c)确定为减速比。
[0099]
首先,用于各个公式的术语如下,并省略了与前面说明的术语重复的部分。一方面,在图13及下面的公式中,m_1、m_2、m_3、m_4及m_b分别对应于俯仰连杆112、连接杆116、平行连杆115、平移连杆114及支撑台112,h_i是从原点到m_i各自的重心的高度。
[0100]
a
i
:m
i
的质量中心及旋转中心之间的距离
[0101]
h1:锥重力补偿部的力臂(固定)
[0102]
h:锥重力补偿部的力臂(变化)
[0103]
c:1/(传动比)
[0104]
d:平移长度(0<d<150mm)
[0105]
x:弹簧的压缩长度
[0106]
θ
1m
:锥齿轮(1)的旋转角度
[0107]
θ
2m
:锥齿轮(2)的旋转角度
[0108]
k:重力补偿部的弹性常数
[0109]
τ
g,r
:重力扭矩(滚动)
[0110]
τ
g,p
:重力扭矩(俯仰)
[0111]
τ
k,r
:补偿扭矩(滚动)
[0112]
τ
k,p
:补偿扭矩(俯仰)
[0113]
τ
r
:总扭矩(滚动)
[0114]
τ
p
:总扭矩(俯仰)
[0115]
v
k
(q):对于q(1
‑
自由度)的重力补偿部的势能
[0116]
v
k,total
:系统的总势能
[0117]
下面,计算根据滚动旋转角θ_r及俯仰旋转角θ_p的重力扭矩的公式如下。
[0118]
u
i
=m
i
ga
i
[0119][0120]
h
i
=a
i
cos(θ
r
)cos(θ
p
)
[0121][0122][0123]
h=h
init
+c*d
[0124]
θ
1m
=
‑
θ
p
‑
θ
r
‑
π
[0125]
θ
2m
=
‑
θ
p
+θ
r
‑
π
[0126]
x(q)=h
12
+h2+2h1h*cos(q)
[0127]
v
k,total
=v
k
(θ
1m
)+v
k
(θ
2m
)
[0128][0129][0130]
τ
r
=τ
g,r
+τ
k,r
=0
[0131]
τ
p
=τ
g,p
+τ
k,p
=0
[0132][0133]
通过上述展开过程,最终确定的弹性体171的弹性模量、减速器1823的设置旋转比的计算过程如下。
[0134][0135]
如上,将弹性体17的弹性模量和/或减速器1823的设置旋转比按照其他设计规范进行变更,由此缩小重力扭矩与补偿扭矩之间的差异,可以提供更加有效的重力补偿装置。
[0136]
虽然已经示出和描述了本发明的一些实施例,但是本发明不限于所描述的实施例。相反,本领域技术人员将理解,在不脱离本发明的原理和精神的情况下可以对这些实施例进行改变,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1