机器人系统的制作方法
1.本发明涉及一种机器人系统。
背景技术:
2.在产业用机器人等的机器人系统中,使用增强现实(ar)的技术受到关注,正大力进行着研究开发。
3.在这种机器人系统中,例如提出了如下构成的系统:基于由摄影装置拍摄到的机器人的图像,生成机器人的cg影像,通过用户对触摸屏幕上所显示的cg影像进行触摸操作,来使触摸屏幕上的cg影像的机器人虚拟地进行动作,并使实际的机器人追随虚拟的机器人的动作来进行动作。
4.此外,通过将在机器人系统中设定的设定信息叠加于机器人的图像来生成设定信息的cg影像,由此用户能够更直观地理解设定信息。另外,也能够对设定信息的cg影像进行触摸操作。
5.在此,在该机器人系统中,重要的是基于由摄影装置拍摄到的处理对象物的图像来以追随处理对象物的方式进行机器人的移动目的地的位置校正,需要预先设定与机器人、摄影装置以及处理对象物的位置有关的信息。
6.作为与机器人、摄影装置以及处理对象物的位置有关的信息,例如列举(1)作为机器人的位置校正基准的坐标系的原点和各轴的方向、(2)作为机器人的位置校正基准的机器人的位置(机器人的各关节的旋转角度或平移量等)、(3)机器人与摄影装置之间的相对位置关系、(4)摄影装置与处理对象物之间的相对位置关系等。
7.另外,作为利用ar设备识别机器人坐标系的方法,提出了如下方法等:在机器人的规定位置设置标记,利用ar设备检测标记来识别机器人坐标系;利用ar设备识别机器人的形状来识别机器人坐标系;以手动方式使以某个确定的位置和朝向显示的ar图形的位置和朝向与实际的机器人的位置和朝向一致。
8.例如,在专利文献1中公开了“一种机器人系统,具备:机器人臂;摄像机,其设置为用于进行工件的拍摄;校准治具,其安装于所述机器人臂的前端部,具有能够进行图像识别的标记;以及校准装置,其用于导出摄像机坐标与机器人坐标的相关性,该摄像机坐标是由所述摄像机拍摄的图像内的坐标,该机器人坐标是将所述机器人臂作为基准的坐标,所述校准装置具有:臂控制部,其对所述机器人臂进行控制使得在使所述标记朝向所述摄像机的状态下使所述标记移动到与所述摄像机的光轴正交的平面内的多个摄影位置;摄像机坐标获取部,其获取所述标记处于所述摄影位置时的所述标记的所述摄像机坐标;姿势信息获取部,其获取所述标记处于所述摄影位置时的所述机器人的姿势信息;以及相关性导出部,其基于所述摄像机坐标获取部和所述姿势信息获取部各自获取到的所述摄像机坐标和所述姿势信息,导出所述摄像机坐标与所述机器人坐标的相关性。”。
9.现有技术文献
10.专利文献
11.专利文献1:日本特开2014-180720号公报
技术实现要素:
12.发明要解决的问题
13.然而,利用ar设备(增强现实显示装置等)检测标记来识别机器人坐标系的方法需要预先根据机器人的类型来决定粘贴标记的位置。因此,在ar提供者侧产生非常大的时间及劳力等的负担。
14.在利用ar设备识别机器人的形状来识别机器人坐标系的方法中也是,需要事先按类型记录(登记)机器人的模型,从而ar提供者侧的负担变大。
15.在以手动方式使以某个确定的位置和朝向显示的ar图形的位置和朝向与实际的机器人的位置和朝向一致的方法中,在ar利用者侧产生非常大的负担。
16.并且,当在利用ar设备识别出机器人坐标系之后使ar设备移动到远离标记的场所时,有可能无法准确地测定ar设备与标记的位置关系而导致ar图形的显示位置产生偏移。ar设备具备陀螺仪传感器等来检测移动,但是即使基于其检测结果来修正位置、朝向也会产生显示偏移。特别是在旋转移动时容易产生显示偏移。
17.因此,强烈期望开发如下方法:能够与机器人的类型无关地准确地测定ar设备与标记的位置关系,能够利用ar设备比较容易且高精度地识别机器人的位置或朝向。
18.用于解决问题的方案
19.本公开的机器人系统的一个方式构成为具备:至少一个以上的基准用标志,所述至少一个以上的基准用标志设置于规定位置,具有坐标明确的基准用的特征点;机器人坐标系确定用标志,其设置在机器人的动作范围内,具有用于确定机器人坐标系的确定用的特征点;标志检测部,其通过一次的检测操作来同时检测所述机器人坐标系确定用标志和至少一个所述基准用标志;机器人系统信息接收部,其接收与机器人系统有关的信息;机器人坐标系确定部,其根据由所述标志检测部检测出的所述机器人坐标系确定用标志的至少位置和由所述机器人系统信息接收部接收到的坐标系信息,来确定机器人的坐标系;增强现实显示装置,其用于基于由所述机器人坐标系确定部确定的机器人的坐标系,显示由所述机器人系统信息接收部接收到的与机器人系统有关的信息;坐标系设定部,其通过使机器人移动到指定位置来设定原点坐标系;以及坐标系信息发送部,其向所述增强现实显示装置发送由所述坐标系设定部设定的坐标系信息。
20.发明的效果
21.在本公开的机器人系统的一个方式中,能够与机器人的类型无关地利用ar设备(增强现实显示装置)比较容易地识别机器人的位置或朝向。另外,只要在能够对ar设备的移动范围内的基准用标志进行检测的范围内设置基准用标志,就能够抑制ar图形的显示位置的偏移。
22.因此,根据本公开的机器人系统的一个方式,能够与机器人的类型无关地始终准确地测定ar设备与机器人坐标系确定用标志、基准用标志的位置关系,能够利用ar设备比较容易且高精度地识别机器人的位置或朝向。
附图说明
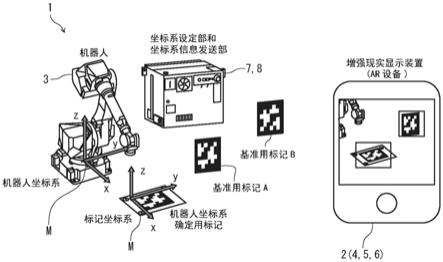
23.图1是示出一个方式的机器人系统的图。
24.图2是示出一个方式的机器人系统的图。
25.图3是在一个方式的机器人系统中检测多个标记(标志)来抑制位置偏移的方法的说明中使用的图。
26.图4是在一个方式的机器人系统中检测标记(标志)来抑制位置偏移的方法的说明中使用的图。
具体实施方式
27.下面,参照图1至图4来对一个实施方式所涉及的机器人系统进行说明。
28.如图1所示,本实施方式的机器人系统1构成为:在要使头戴式显示器、投影仪等ar设备(增强现实显示装置)2移动的范围内设置坐标明确的至少一个以上的基准用标记(具有坐标明确的基准用的特征点的至少一个以上的基准用标志)a、b
···
,并且在机器人3的动作范围内设置用于确定机器人坐标系的机器人坐标系确定用标记(具有用于确定机器人坐标系的确定用的特征点的机器人坐标系确定用标志)m,通过利用ar设备2同时检测机器人坐标系确定用标记m和各个基准用标记a、b
···
中的至少两个,来识别在机器人坐标系确定用标记m上设定的坐标系相对于基准用标记a、b
···
的位置或朝向。
29.此外,增强现实显示装置2只要至少具备用于利用ar显示部(增强现实显示部)显示与现实设备对应的虚拟模型的应用,就无需对其结构进行特别限定。
30.在该机器人系统1中,通过针对机器人3的坐标系设定了在机器人坐标系确定用标记m上设定的坐标系,由此能够利用ar设备2识别机器人3的坐标系,例如针对由输送机搬送的工件的输出线、在工厂内生产线上障碍物多而ar设备2需要绕过障碍物的线等,也能够高精度地确定并显示机器人3的位置、朝向等,能够实现有用、较佳的系统。
31.更具体地说,如图1所示,本实施方式的机器人系统1具备在头戴式显示器、投影仪等ar设备2的移动范围内设置的、坐标明确的至少两个以上的基准用标记a、b
···
以及在机器人3的动作范围内设置的用于确定机器人坐标系的至少一个以上的机器人坐标系确定用标记m。
32.本实施方式的机器人系统1构成为具备:标记检测部(标志检测部)4,其检测设置于规定位置的基准用标记a、b
···
和机器人坐标系确定用标记m的至少位置;机器人系统信息接收部5,其接收与机器人系统1有关的信息;机器人坐标系确定部6,其根据由标记检测部4检测出的基准用标记a、b
···
和机器人坐标系确定用标记m的至少位置以及由机器人系统信息接收部5接收到的坐标系信息,来确定机器人的坐标系;坐标系设定部7,其通过使机器人3移动到指定位置来设定原点坐标系;以及坐标系信息发送部8,其向ar设备2发送由坐标系设定部7设定的坐标系信息,其中,利用ar设备2的显示部(应用)来基于由机器人坐标系确定部6确定的机器人3的坐标系,显示由机器人系统信息接收部5接收到的与机器人系统1有关的信息。
33.机器人坐标系确定部6构成为基于由坐标系设定部7在机器人坐标系确定用标记m上设定的坐标系来确定机器人3的坐标系。另外,本实施方式的机器人坐标系确定用标记m的姿势被唯一地确定,该机器人坐标系确定用标记m设置于机器人3的动作范围内或机器人
自身上。
34.该机器人系统1构成为:通过利用ar设备2同时检测机器人坐标系确定用标记m和各个基准用标记a、b
···
中的至少两个,来识别在机器人坐标系确定用标记m上设定的坐标系相对于基准用标记a、b
···
的位置、朝向。
35.<实施例1:基于在机器人坐标系确定用标记上设定的坐标系进行位置对准>
36.在此,下面说明在如上述那样构成的本实施方式的机器人系统1中进行“基于设定于标记上的坐标系进行位置对准”的一例。
37.如图1所示,在ar图形中设置基准用标记a、b。此时,基准用标记a和基准用标记b设置在能够利用ar设备2同时检测到的范围内。
38.利用ar设备2同时检测基准用标记a和基准用标记b。由此,利用ar设备2识别基准用标记a和基准用标记b各自的位置。
39.接着,在机器人3的动作范围内且在能够利用ar设备2来与任一个基准用标记(在此设为基准用标记a)同时检测到的范围内设置机器人坐标系确定用标记m。
40.使机器人3移动,来利用机器人3的工具修正机器人坐标系确定用标记m的原点、x方向点、y方向点(原点坐标系设定)。由此,在机器人坐标系确定用标记m上设定坐标系。
41.接着,利用ar设备2同时检测机器人坐标系确定用标记m和基准用标记a。由此,利用ar设备2识别机器人坐标系确定用标记m上的坐标系,并且识别基准用标记a、基准用标记b、机器人坐标系确定用标记m的各个的位置关系。此外,机器人坐标系确定用标记m上的坐标系用于识别机器人3的坐标系。
42.然后,从机器人3侧向ar设备2(从机器人控制器向ar设备控制器)发送与机器人坐标系确定用标记m上的坐标系对应的机器人坐标系。由此,能够利用ar设备2识别机器人3的坐标系。
43.另外,只要是能够利用ar设备2检测到基准用标记a、b的范围内,就能够抑制ar图形的显示位置的偏移。
44.此外,在利用ar设备2识别出机器人3的坐标系之后,也可以从设置场所中去除机器人坐标系确定用标记m。
45.<实施例2:基于在设置于机器人手的机器人坐标系确定用标记上设定的坐标系进行位置对准>
46.接着,下面说明如图2所示那样进行“基于在设置于机器人的手的标记(工具坐标系标记)上设定的坐标系进行位置对准”的一例。
47.在ar图形中设置基准用标记a、b。此时,基准用标记a和基准用标记b设置在能够利用ar设备2同时检测到的范围内。
48.利用ar设备2同时检测基准用标记a和基准用标记b。由此,利用ar设备2来识别基准用标记a和基准用标记b各自的位置。
49.接着,在机器人3的手设置机器人坐标系确定用标记m。针对所设置的机器人坐标系确定用标记m设定工具坐标系。
50.利用ar设备2同时检测机器人坐标系确定用标记m和基准用标记a。由此,利用ar设备2来识别机器人坐标系确定用标记m上的工具坐标系,并且识别基准用标记a、基准用标记b、机器人坐标系确定用标记m的各个的位置关系。此外,机器人坐标系确定用标记m上的工
具坐标系用于识别机器人3的坐标系。
51.然后,从机器人3侧向ar设备2(从机器人控制器向ar设备控制器)发送与机器人坐标系确定用标记m上的坐标系对应的机器人坐标系。由此,能够利用ar设备2来识别机器人3的坐标系。
52.另外,只要是能够利用ar设备2检测到基准用标记a、b的范围内,就能够抑制ar图形的显示位置的偏移。
53.此外,在利用ar设备2识别出机器人3的坐标系之后,也可以从设置场所中去除机器人坐标系确定用标记m。
54.因而,在本实施方式的机器人系统1中,能够与机器人3的类型无关地利用ar设备2比较容易地识别机器人3的位置或朝向。另外,通过在ar设备2的移动范围内事先设置基准用标记a、b
···
,由此只要是能够检测基准用标记a、b
···
的范围内,就能够抑制ar图形的显示位置的偏移。
55.因此,根据本实施方式的机器人系统1,能够与机器人3的类型无关地始终准确地测定ar设备2与机器人坐标系确定用标记m的位置关系,能够利用ar设备2比较容易且高精度地识别机器人3的位置或朝向。
56.另外,在本实施方式的机器人系统1中,在如图3所示那样设置有三个以上的基准用标记a、b、c、d
···
的情况下,通过适当地每次同时检测基准用标记a、b、c、d
···
中的两个,由此根据任意的基准用标记a、b、c、d
···
都能够识别机器人坐标系。
57.并且,如图4所示,只要利用ar设备2检测任意的基准用标记a、b、c、d
···
,就能够抑制ar图形的显示的偏移。
58.以上对机器人系统的一个实施方式进行了说明,但是并不限定于上述的一个实施方式,能够在不脱离其宗旨的范围内适当地进行变更。
59.附图标记说明
60.1:机器人系统;2:ar设备(增强现实显示装置);3:机器人;4:标记检测部(标志检测部);5:机器人系统信息接收部;6:机器人坐标系确定部;7:坐标系设定部;8:坐标系信息发送部;a~d:基准用标记(基准用标志);m:机器人坐标系确定用标记(机器人坐标系确定用标志)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1