电动作业机的制作方法
电动作业机
1.相关申请的交叉引用
2.本国际申请要求基于在日本专利局申请的日本专利申请第2018
‑
172747号的优先权,将日本专利申请第2018
‑
172747号的全部内容通过引用并入本国际申请中。
技术领域
3.本公开涉及一种电动作业机。
背景技术:
4.下述专利文献1记载的电动作业机从串联连接有多个电池单元的电池组接受电力供给而动作。上述电池组在多个电池单元中任一个电池单元的电压值比阈值低的状态持续了一定时间的情况下,向电动作业机输出放电禁止信号。上述电动作业机若从电池组被输入放电禁止信号,则停止控制马达的电流的开关元件,来保护电池组。
5.专利文献1:日本特开2005
‑
131770号公报
6.电池组在较长的时间段流动有较大的电流的情况下,还有可能故障。由此,在这种过电流状态的情况下,也希望从电池组输出放电禁止信号,来保护电池组。然而,若作业机的载荷变高,则从电池组向作业机流动的电流变大。因此,若电池组在过电流状态时禁止放电,则存在作业机的载荷较高时频繁地禁止放电,作业效率下降这一问题。
技术实现要素:
7.本公开提供一种在应该进行保护时使电池组的保护功能动作,并提高使用者的便利性的电动作业机。
8.本公开的一个方面为一种电动作业机,其从响应于出现了过载而执行保护动作的电池组接受电力供给来进行动作,该电动作业机具备马达、开关以及控制部。马达从电池组接受电力供给而进行驱动。开关构成为供操作而使马达启动。控制部构成为响应于开关受到了操作这个情况而使马达启动,并获取与电池组的放电状态相关的状态信息,该控制部基于所获取到的状态信息,以抑制由电池组执行保护动作方式控制马达的驱动。
9.通过上述的电动作业机的控制部获取与电池组的放电状态相关的状态信息。若电池组出现过载则执行保护动作。因此,控制部基于所获取到的状态信息,以抑制由电池组执行保护动作方式控制马达的驱动。由此,能够在抑制由电池组执行保护动作同时,继续由电动作业机进行的作业。此时,未变更电池组执行保护动作的条件。由此,能够在使电池组在应该进行保护时能够执行保护动作的同时提高使用者的便利性。
10.另外,控制部也可以构成为,基于状态信息,在由电池组执行保护动作之前,变更马达的与供给电力相关的控制参数。
11.通过控制部在由电池组执行保护动作之前,变更马达的与供给电力相关的控制参数,抑制了由电池组执行保护动作,能够继续由电动作业机进行的作业。
12.另外,控制部也可以构成为基于状态信息,以限制供给电力的方式变更控制参数。
13.通过控制部以限制供给电力的方式变更控制参数,从而在电池组执行保护动作之前限制供给电力。其结果为,抑制了电池组的载荷的累加,因此能够在不执行由电池组进行的保护动作的状态下,继续由电动作业机进行的作业。
14.另外,状态信息也可以包含与电池组执行保护动作的预兆相关的信息。
15.通过状态信息包含与执行保护动作的预兆相关的信息,从而控制部能够在电池组执行保护动作之前识别该预兆。进而,控制部能够在由电池组执行保护动作之前,以不执行保护动作的方式、即抑制电池组的载荷的累加的方式变更控制参数。
16.另外,控制参数也可以包含从电池组向马达流动的放电电流的值,控制部基于状态信息,限制放电电流的值。
17.通过控制部限制放电电流,从而在电池组执行保护动作之前限制供给电力。其结果为,虽然电动作业机的输出下降,但使用者能够在不执行由电池组进行的保护动作的状态下,继续由电动作业机进行的作业。
18.另外,控制部也可以构成为基于状态信息,在由电池组执行保护动作之前,使马达停止。
19.由于电池组执行保护动作,因而电动作业机变得无法使用比较长的时间。因此,通过控制部在执行由电池组进行的保护动作之前,使马达停止,从而能够使电池组在比较短的时间恢复,来再次开始由电动作业机进行的作业。
20.另外,状态信息也可以包含对与从电池组向马达供给的放电电流的值相应的加法值进行累加所得到的电池组用来执行保护动作的累加值。控制部也可以构成为将累加值用作电池保护值来控制马达的驱动。
21.通过控制部从电池组获取电池组用来执行保护动作的累加值。由此,控制部能够使用所获取到的累加值,以抑制电池组执行保护动作的方式控制马达的驱动。
22.另外,状态信息也可以包含映射信息,该映射信息用于计算电池组用来执行保护动作的累加值。控制部也可以构成为,检测与放电相关的放电关系值,并根据所检测出的放电关系值和映射信息计算电池保护值,使用所计算出的电池保护值来控制马达的驱动。电池保护值也可以是与由电池组对映射信息中与放电关系值相应的加法值进行累加而计算出的累加值对应的值。
23.通过控制部获取用于计算电池组用来执行保护动作的累加值的映射信息,并使用所获取到的映射信息来计算与累加值对应的电池保护值。由此,控制部能够使用所计算出的电池保护值,以抑制电池组执行保护动作的方式控制马达的驱动。
24.另外,放电关系值也可以是从电池组向电动作业机流动的放电电流的值。
25.能够将所检测出的放电电流的值用作放电关系值来计算电池保护值。
26.另外,状态信息也可以包含累加值。控制部也可以构成为,响应于从电池组获取到累加值这个情况,将从电池组获取到的累加值设为电池保护值。
27.控制部响应于从电池组获取到累加值这个情况,将从电池组获取到的累加值设为电池保护值。因此,控制部由于尽可能地使用与电池组用来执行保护动作的值相同的值,因此能够高精度检测电池组执行保护动作的预兆。
28.另外,控制部也可以构成为,使从电池组获取到的既往的累加值和映射信息中与检测出的放电关系值相应的加法值相加,来计算电池保护值。
29.通过控制部对既往从电池组获取到的累加值加和加法值,来计算电池保护值。因此,控制部能够尽可能地使用电池组用来执行保护动作的值。进而,控制部能够在尽可能地使用电池组用来执行保护动作的值的同时,在通信与通信之间、通信暂时中断的情况等无法获取累加值的期间,也更新电池保护值。由此,能够高精度地检测电池组执行保护动作的预兆。
30.另外,电池组也可以构成为,响应于累加值超过了保护阈值这个情况,而执行保护动作。控制部也可以构成为,响应于电池保护值超过了比保护阈值小的限制阈值这个情况,以限制供给电力的方式变更马达的与供给电力相关的控制参数。
31.若电池保护值超过比保护阈值小的限制阈值,则以对供给电力进行限制的方式变更马达的与供给电力相关的控制参数。由此,抑制了累加值及电池保护值的增加。其结果为,抑制了由电池组进行的保护动作执行,马达能够从电池组继续接受电力供给。
32.另外,状态信息也可以包含表示从电池组向马达流动的放电电流的值与加法值之间的对应关系的映射信息。电池组也可以构成为,响应于累加值超过了保护阈值这个情况,执行保护动作。控制部也可以构成为,检测放电电流,并根据电池保护值、检测出的放电电流的值以及映射信息,预测直至电池组执行保护动作为止的时间,响应于所预测出的时间比时间阈值短这个情况,而以限制供给电力的方式变更马达的与供给电力相关的控制参数。
33.预测直至电池组执行保护动作为止的时间,响应于所预测出的时间比时间阈值短这个情况,以限制供给电力的方式变更马达的与供给电力相关的控制参数。由此,抑制了累加值及电池保护值的增加。其结果为,抑制了由电池组进行的保护动作执行,马达能够从电池组继续接受电力供给。
34.另外,电池组也可以构成为,响应于累加值超过了保护阈值这个情况而执行保护动作。控制部也可以构成为,响应于电池保护值超过了比保护阈值小的停止阈值这个情况,而使马达停止。
35.若电池保护值超过比保护阈值小的停止阈值,则马达停止。由此,累加值及电池保护值减小。其结果为,与执行由电池组进行的保护动作的情况相比,能够通过较短的马达停止期间使电池组恢复。进而,马达能够在比较短的停止期间后,重新开始来自电池组的电力供需。
36.另外,停止阈值也可以包含第一停止阈值和第二停止阈值。第二停止阈值大于第一停止阈值。控制部也可以在响应于电池保护值超过了第一停止阈值这个情况,而使马达停止之后,响应于开关受到了操作这个情况,而使马达重新启动。另外,控制部也可以构成为在响应于电池保护值超过了第二停止阈值这个情况而使马达停止之后,在电池保护值低于第一停止阈值之前,禁止马达的重新启动。
37.响应于电池保护值超过了第一停止阈值这个情况,使马达停止,之后,响应于操作部受到了操作这个情况,使马达重新启动。进一步,响应于电池保护值超过了第二停止阈值这个情况,使马达停止,在电池保护值低于第一停止阈值之前,停止马达的重新启动。由此,在马达暂时停止之后,使用者能够通过对操作部进行操作继续电动作业机的使用,并且能够通过继续使用,识别出电动作业机变得无法使用的期间到来。
38.另外,状态信息也可以包含表示从电池组向马达流动的放电电流的值与加法值之
间的对应关系的映射信息。控制部也可以构成为,检测放电电流的值,并基于所检测出的放电电流的值和所获取到的映射信息,设定限制阈值。
39.通过状态信息包含映射信息,从而控制部能够响应于放电电流的值而使限制阈值变化。进而,控制部能够响应于放电电流的值来适当地限制供给电力。
40.另外,状态信息也可以包含电池组的电池温度和对应于不同的电池温度的映射信息。控制部也可以基于所检测出的放电电流的大小、所获取到的电池温度以及所获取到的映射信息来设定限制阈值。
41.通过状态信息包含对应于不同的电池温度的映射信息,从而控制部能够响应于电池温度和放电电流的值而使限制阈值变化。进而,控制部能够更加适当地限制供给电力。
42.另外,状态信息也可以包含电池组的剩余容量。电池组也可以响应于剩余容量低于了第一容量阈值这个情况而执行保护动作。控制部也可以构成为,响应于剩余容量低于了比第一容量阈值大的第二容量阈值这个情况,而以对供给电力进行限制的方式变更马达的与供给电力相关的控制参数。
43.若电池组的剩余容量低于比第一容量阈值大的第二容量阈值,则变更马达的与供给电力相关的控制参数。由此,电池组的剩余容量的减小速度变得缓慢。其结果为,抑制了由电池组进行的保护功能动作执行,马达能够从电池组继续接受供给电力。
44.另外,状态信息也可以包含电池组的电池温度。电池组也可以响应于电池温度超过了第一温度阈值这个情况而执行保护动作。控制部也可以响应于电池温度超过了比第一温度阈值小的第二温度阈值这个情况,而以对供给电力进行限制的方式变更与供给电力相关的控制参数。
45.若电池温度超过比第一温度阈值小的第二温度阈值,则变更马达的与供给电力相关的控制参数。由此,抑制了电池组的温度上升。其结果为,抑制了由电池组进行的保护动作执行,马达能够从电池组继续接受供给电力。
46.另外,控制部也可以执行马达的脉冲宽度调制即pwm控制。控制参数也可以包含pwm控制中的占空比。
47.通过变更pwm控制中的占空比,能够变更向马达流动的电流的值,变更向马达供给的供给电力。进而,通过降低占空比来抑制供给电力,从而能够抑制由电池组进行的保护动作执行。
48.另外,控制部也可以从马达驱动前获取状态信息,并从马达驱动之前基于状态信息来变更控制参数。
49.若将电池组安装于电动作业机,则在马达驱动之前,通过电动作业机从电池组获取状态信息,并基于所获取到的状态信息来变更控制参数。由此,能够在以电池组不执行保护动作的方式设定控制参数之后使马达启动。进而,能够避免电池组在马达启动之后不久执行保护动作而使马达停止。
50.另外,上述的电动作业机也可以还具备用于向控制部供给电源的主电源开关。控制部也可以在从主电源开关接通之后的且在马达驱动之前的时刻起对电池组开始请求状态信息。
51.在主电源开关变成了接通状态之后,开始电动作业机与电池组间的通信。因此,与仅通过将电池组安装到了电动作业机就开始通信的情况相比,能够抑制消耗电力。另外,从
马达驱动之前的时刻就对电池组开始请求状态信息。因此,能够在马达驱动之前变更控制参数来使马达在电池组不执行保护动作的消耗电力的范围内启动。
52.另外,控制部也可以获取通过串行通信从电池组传送来的状态信息。也可以是,在从电池组向马达流动有电流时的串行通信的频度高于从电池组向马达没有电流流动时的串行通信的频度。
53.与从电池组向马达流动有电流时相比,从电池组向马达没有电流流动时,电池组的状态不易变化。因此,通过在从电池组向马达没有电流流动时抑制串行通信的频度,能够抑制电动作业机的处理载荷。
54.另外,控制部也可以基于所获取到的状态信息,对于从电池组向马达流动的放电电流设定电流上限值,并将放电电流的值控制为所设定的电流上限值以下。
55.设定放电电流的电流上限值,并以放电电流的值为所设定的电流上限值以下的方式控制马达的驱动。由此,通过在电池组执行保护动作之前降低电流上限值,从而能够在电池组不执行保护动作的消耗电力的范围内继续马达的驱动。
56.本公开还包含以下项目。
57.[项目a
‑
1]
[0058]
本公开的一个方面为一种电动作业机,具备马达、获取部以及控制部。马达从电池组接受电力供给而进行旋转。获取部获取与电池组的放电状态相关的状态信息。控制部基于由获取部获取到的状态信息,在电池组的保护功能动作之前,变更马达的与从上述电池组向上述马达供给的供给电力相关的控制参数。
[0059]
根据本公开的一个方面,通过电动作业机获取与电池组的放电状态相关的状态信息。若电池组例如变成过电流状态,则保护功能动作。因此,电动作业机基于所获取到的状态信息,在电池组的保护功能动作之前,变更马达的与供给电力相关的控制参数。由此,电动作业机能够继续接受以抑制电池组的保护功能动作的方式变更了的供给电力。另外,由于未变更电池组的保护功能动作的条件,因此保护功能在应该保护电池组时动作。由此,能够在使电池组的保护功能在应该进行保护时动作的同时,提高使用者的便利性。
[0060]
[项目a
‑
2]
[0061]
控制部也可以基于状态信息,以对供给电力进行限制的方式变更控制参数。
[0062]
通过控制部以对供给电力进行限制的方式变更控制参数,从而在电池组的保护功能动作之前限制供给电力。其结果为,使用者能够在电池组的保护功能不动作的状态下继续电动作业机的使用。
[0063]
[项目a
‑
3]
[0064]
状态信息也可以包含与保护功能动作的预兆相关的信息。
[0065]
通过状态信息包含与保护功能动作的预兆相关的信息,从而电动作业机能够在电池组的保护功能动作之前识别该预兆。进而,电动作业机能够在保护功能动作之前,以保护功能不动作的方式变更控制参数。
[0066]
[项目a
‑
4]
[0067]
控制参数也可以包含从电池组向马达供给的放电电流。控制部也可以基于状态信息来限制放电电流。
[0068]
通过控制部限制放电电流,从而在电池组的保护功能动作之前限制供给电力。其
结果为,使用者能够在电池组的保护功能不动作的状态下继续使用电动作业机。
[0069]
[项目a
‑
5]
[0070]
状态信息也可以包含对与从电池组向马达供给的放电电流的大小相应的加法值进行累加所得到的计数值。电池组的保护功能也可以在计数值超过了第一阈值的情况下动作。而且,控制部也可以在计数值超过了比第一阈值小的第二阈值的情况下,变更控制参数。
[0071]
若计数值超过比第一阈值小的第二阈值,则变更马达的与供给电力相关的控制参数。由此,抑制了计数值的上升。其结果为,抑制了电池组的保护功能动作,马达能够从电池组继续接受电力供给。
[0072]
[项目a
‑
6]
[0073]
状态信息也可以包含表示放电电流的大小与加法值之间的对应关系的映射信息。而且,控制部也可以基于所检测出的放电电流的大小和所获取到的映射信息来设定第二阈值。
[0074]
通过状态信息包含映射信息,从而控制部能够响应于放电电流的大小而使第二阈值变化。进而,控制部能够响应于放电电流的大小来适当地限制供给电力。
[0075]
[项目a
‑
7]
[0076]
状态信息也可以包含电池组的电池温度和依不同电池温度的映射信息。而且,控制部也可以基于所检测出的放电电流的大小、所获取到的电池温度以及所获取到的映射信息来设定第二阈值。
[0077]
通过状态信息包含对应于不同的电池温度的映射信息,从而控制部能够响应于电池温度和放电电流的大小而使第二阈值变化。进而,控制部能够更加适当地限制供给电力。
[0078]
[项目a
‑
8]
[0079]
状态信息也可以包含电池组的剩余容量。电池组的保护功能也可以在剩余容量低于了第一容量阈值的情况下动作。而且,控制部也可以在剩余容量低于了比第一容量阈值大的第二容量阈值的情况下,变更控制参数。
[0080]
若电池组的剩余容量低于比第一容量阈值大的第二容量阈值,则变更马达的与供给电力相关的控制参数。由此,电池组的剩余容量的减少速度变得缓慢。其结果为,抑制了电池组的保护功能动作,马达能够从电池组继续接受供给电力更长时间。
[0081]
[项目a
‑
9]
[0082]
状态信息也可以包含电池组的电池温度。电池组的保护功能也可以在电池温度超过了第一温度阈值的情况下动作。而且,控制部也可以在电池温度超过了比所述第一温度阈值小的第二温度阈值的情况下,变更控制参数。
[0083]
若电池温度超过比第一温度阈值小的第二温度阈值,则变更马达的与供给电力相关的控制参数。由此,抑制了电池组的温度上升。其结果为,抑制了电池组的保护功能动作,马达能够从电池组继续接受供给电力更长时间。
[0084]
[项目a
‑
10]
[0085]
控制部也可以执行向马达流动的电流的脉冲宽度调制(pwm)控制。控制参数也可以包含pwm控制中的占空比。
[0086]
通过变更pwm控制中的占空比,从而能够变更向马达流动的电流的值,变更向马达
供给的供给电力。进而,通过降低占空比来抑制供给电力,从而能够抑制电池组的保护功能动作。
[0087]
[项目a
‑
11]
[0088]
获取部也可以从马达驱动前获取状态信息。控制部也可以从马达驱动之前基于状态信息来变更控制参数。
[0089]
从马达驱动前获取状态信息,并基于所获取到的状态信息来变更控制参数。由此,在使马达暂时停止而重新启动的情况下,控制参数不会从暂时停止前的值返回到初始值而使马达重新启动。由此,能够使马达在电池组的保护功能不动作的消耗电力的范围内重新启动。
[0090]
[项目a
‑
12]
[0091]
电动作业机也可以具备用于向控制部供给电源的主电源开关。控制部也可以在从主电源开关变成接通状态之后的且在马达驱动之前的时刻就对电池组开始请求状态信息。
[0092]
在主电源开关变成了接通状态之后,开始电动作业机与电池组的通信。因此,与仅通过将电池组安装到了电动作业机就开始通信的情况相比,能够抑制电力消耗。另外,从马达驱动之前的时刻就对电池组开始请求状态信息。因此,能够在马达驱动之前变更控制参数来使马达的驱动在电池组的保护功能不动作的供给电力的范围内开始。
[0093]
[项目a
‑
13]
[0094]
获取部也可以获取通过串行通信从电池组传送来的状态信息。也可以是,从电池组向马达流动有电流时的串行通信的频度高于从电池组向马达没有电流流动时的串行通信的频度。
[0095]
与从电池组向马达流动有电流时相比,从电池组向马达没有电流流动时,电池组的状态不易变化。因此,通过在从电池组向马达没有电流流动时抑制串行通信的频度,能够抑制电动作业机的处理载荷。
[0096]
[项目a
‑
14]
[0097]
电动作业机也可以具备设定部,设定部构成为基于通过获取部所获取到的状态信息,设定从电池组向马达供给的放电电流的电流上限值。控制部也可以控制为使放电电流的值为通过设定部所设定的电流上限值以下。
[0098]
设定放电电流的电流上限值,并控制为使放电电流的值为所设定的电流上限值以下。由此,通过在电池组的保护功能动作之前降低电流上限值,从而能够在电池组的保护功能不动作的供给电力的范围内继续马达50的驱动。
附图说明
[0099]
图1是表示第一实施方式的作业机的外观的立体图。
[0100]
图2是表示第一实施方式所涉及的马达控制系统的结构的框图。
[0101]
图3是表示第一实施方式所涉及的作业机的控制电路执行的主处理的流程图。
[0102]
图4是表示第一实施方式所涉及的作业机的控制电路执行的电池状态处理的流程图。
[0103]
图5是表示第一实施方式所涉及的作业机的控制电路执行的马达控制处理的流程图。
[0104]
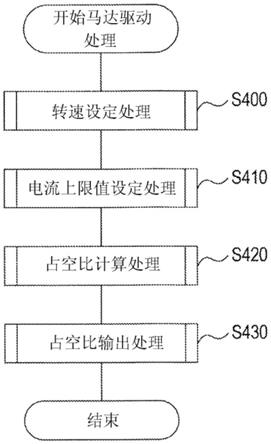
图6是表示第一实施方式所涉及的作业机的控制电路执行的马达驱动处理的流程图。
[0105]
图7是表示第一实施方式所涉及的作业机的控制电路执行的电流上限设定处理的流程图。
[0106]
图8是示意性地表示第一实施方式所涉及的电池组与作业机之间的数据流的图。
[0107]
图9是表示第一实施方式所涉及的从电池组向作业机发送的蓄积比率的图。
[0108]
图10是第一实施方式所涉及的马达载荷、电流上限值、放电电流、转速、扳机开关以及保护计数值的时序图。
[0109]
图11是表示第一实施方式所涉及的电池控制电路执行的历史处理的流程图。
[0110]
图12是表示第一实施方式所涉及的存储充电器向电池组的安装次数的存储区域的图。
[0111]
图13是表示第一实施方式所涉及的存储工具向电池组的安装次数的存储区域的图。
[0112]
图14是表示第二实施方式所涉及的作业机的控制电路执行的马达驱动处理的流程图。
[0113]
图15是表示第二实施方式所涉及的作业机的控制电路执行的保护计数处理的流程图。
[0114]
图16是表示第二实施方式所涉及的作业机的控制电路执行的占空比上限值设定处理的流程图。
[0115]
图17是示意性地表示第二实施方式所涉及的电池组与作业机之间的数据流的图。
[0116]
图18是表示第三实施方式所涉及的作业机的控制电路执行的电流上限值设定处理的流程图。
[0117]
图19是表示放电电流值与加法值之间的对应关系的计数映射。
[0118]
图20是示意性地表示第三实施方式所涉及的电池组与作业机之间的数据流的图。
[0119]
图21是表示第四实施方式所涉及的作业机的控制电路执行的电池通信处理的流程图。
[0120]
图22是表示第四实施方式所涉及的作业机的控制电路执行的保护计数处理的流程图。
[0121]
图23是表示第四实施方式所涉及的作业机的控制电路执行的保护计数值计算处理的流程图。
[0122]
图24是表示第四实施方式所涉及的电流上限值设定处理的流程图。
[0123]
图25是表示第四实施方式所涉及的电流上限值设定处理的另一例的流程图。
[0124]
图26是第四实施方式所涉及的从电池组向作业机发送的计数映射。
[0125]
图27是表示第四实施方式所涉及的限制电流值相对于保护计数值的变化的图。
[0126]
图28是示意性地表示第四实施方式所涉及的电池组与作业机之间的数据流的图。
[0127]
图29是表示第五实施方式所涉及的作业机的控制电路执行的保护计数停止处理的流程图。
[0128]
图30是第五实施方式所涉及的马达载荷、放电电流、保护计数值以及扳机开关的时序图。
[0129]
附图标记说明
[0130]1…
作业机、2
…
主管、3
…
控制单元、4
…
驱动单元、5
…
罩、6
…
手柄、7
…
右把手、8
…
左把手、9
…
正反切换开关、10
…
解锁按钮、11
…
扳机、12
…
扳机开关、13
…
控制配线管、16
…
马达壳体、17
…
切割刀片、21
…
后端壳体、22
…
电池组、23
…
变速拨盘、24
…
主开关、25
…
显示部、28
…
电池电压检测部、30
…
控制器、32
…
驱动电路、34
…
门电路、36
…
控制电路、38
…
稳压器、41
…
正极端子、42
…
负极端子、43
…
es端子、44
…
串行端子、50
…
马达、52
…
旋转传感器、54
…
电流检测部、56
…
温度检测部、60
…
电池、61
…
电池正极端子、62
…
电池负极端子、63
…
电池es端子、64
…
电池串行端子、65
…
电池控制电路、66
…
电池。
具体实施方式
[0131]
以下,参照附图对用于实施本公开的方式进行说明。
[0132]
(第一实施方式)
[0133]
<1
‑
1.整体结构>
[0134]
如图1所示,在本例示性的实施方式中,关于将本公开的电动作业机应用于割草机的情况进行说明。本例示性的实施方式的作业机系统具备作业机1和电池组22。作业机1是具备主管2、控制单元3、驱动单元4、罩5以及手柄6的割草机。主管2形成为长条且中空的棒状。控制单元3设置在主管2的后端侧。驱动单元4及罩5设置在主管2的前端侧。
[0135]
驱动单元4具备马达壳体16和切割刀片17。切割刀片17是用于割除草、细树木等割除对象物的圆盘状刀片,构成为能够相对于马达壳体16拆装。罩5为了抑制被切割刀片17割除掉的草等朝向作业机1的使用者飞来而设置。
[0136]
在马达壳体16的内部搭载有产生用于使切割刀片17旋转的旋转力的马达50。因马达50的驱动而产生的旋转力经由减速机构传递至安装有切割刀片17的旋转轴。当切割刀片17因马达50的旋转力旋转时,使切割刀片17的外周部分抵接于对象物,由此使用者能够切断对象物。
[0137]
手柄6形成为u字状,在主管2的长度方向上的中间位置附近与主管2连接。在手柄6的第一端侧设置有供使用者用右手把持的右把手7,在手柄6的第二端侧设置有供使用者用左手把持的左把手8。
[0138]
在右把手7的顶端侧设置有正反切换开关9、解锁按钮10以及扳机11。正反切换开关9将马达50的旋转方向、即切割刀片17的旋转方向切换为正转或反转中的任一个旋转方向。此外,正转是在将草等割除时设定的旋转方向,反转是在将缠绕于切割刀片17的草等去除时设定的旋转方向。
[0139]
扳机11是使用者为了指示切割刀片17的旋转或者停止而进行操作的操作部件。在右把手7的内部配置有与扳机11联动地动作的扳机开关12。扳机开关12在扳机11操作时接通,在扳机11非操作时断开,输出表示该接通状态或者断开状态的扳机信号ts。在本实施方式中,扳机11相当于操作部的一个例子。
[0140]
解锁按钮10是用于防止或者抑制切割刀片17误动作的按钮。在未按下解锁按钮10的状态下,解锁按钮10与扳机11机械式卡合。由此,限制扳机11移动,阻止或者抑制扳机开关12变成接通状态。在按下了解锁按钮10的状态下,解除了由解锁按钮10形成的与扳机11的卡合。
[0141]
在右把手7的下端与控制单元3的前端之间设置有控制配线管13。控制配线管13形成为中空的棒状,在内部配设有控制用线束。控制用线束是用于将扳机开关12及正反切换开关9与控制单元3电连接的配线。
[0142]
控制单元3由后端壳体21和电池组22构成。
[0143]
在后端壳体21的前端侧以使用者能够进行操作的状态设置有变速拨盘23及主开关24。变速拨盘23为了使用者对马达50的转速进行可变设定而设置。主开关24是用于通过使从电池60向各部分的供电开始,从而使作业机1为可使用的状态的开关。当主开关24接通时,形成从电池60向马达50的放电路径,当主开关24断开时,从电池60向马达50的放电路径被切断。在本实施方式中,主开关24相当于主电源开关的一个例子。
[0144]
进一步,在后端壳体21的前端侧以能够由使用者进行视觉确认的方式设置有显示部25。显示部25为了向使用者报知动作状态、异常等而设置,具备显示灯、剩余容量显示灯以及反转显示灯等。显示灯在主开关24被接通并进行向作业机1的各部的供电时亮灯。剩余容量显示灯显示电池60的剩余容量。反转显示灯显示马达50为反转中。此外,剩余容量是电池60残留的电量。
[0145]
在后端壳体21的内部配置有后述的控制器30。控制器30主要执行马达50的驱动控制。控制器30通过控制向马达50的通电而控制马达50的转速。
[0146]
电池组22构成为能够相对于后端壳体21的后端部拆装。
[0147]
如图2所示,电池组22具备电池60、电池控制电路65、电池正极端子61、电池负极端子62、电池es端子63以及电池串行端子64。电池60通过多个电池单元串联连接而构成。电池60是用于向后端壳体21内的各部分及马达50供给电力的可反复进行充电的电源。作为一个例子,电池60具备锂离子2次电池。另外,电池60的额定电压例如可以是64v。
[0148]
<1
‑
2.马达控制系统的结构>
[0149]
接下来,参照图2对具备电池控制电路65和控制器30的马达50的控制系统进行说明。
[0150]
电池控制电路65具备cpu65a、rom65b、ram65c、闪存等存储器65d以及i/o等。
[0151]
电池正极端子61与电池60的正极侧连接。电池负极端子62与电池60的负极侧连接。电池es端子63经由第一电池连接线68而与电池控制电路65连接。电池es端子63是输出来自电池组22的放电允许信号或者放电禁止信号的端子。es是错误停止的替代简称。
[0152]
电池串行端子64经由第二电池连接线69而与电池控制电路65连接。电池串行端子64是通过串行通信输出多个电池信息的端子。多个电池信息包含与电池组22的放电状态相关的状态信息。状态信息包含后述的保护计数值、计数阈值、电池温度、电池60的剩余容量等。进一步,状态信息也可以包含后述的计数映射信息、加法阈值、减法阈值等。
[0153]
另外,电池组22具备未图示的单元电压检测部、单元温度检测部、电池电流检测部。单元电压检测部检测电池60的各单元的电压值,并将检测信号向电池控制电路65输出。单元温度检测部由热敏电阻等构成,检测至少一个单元的温度并将检测信号向电池控制电路65输出。电池电流检测部检测在放电时电池60中流动的放电电流,并将检测信号向电池控制电路65输出。
[0154]
控制器30具备正极端子41、负极端子42、es端子43以及串行端子44。进一步,控制器30具备驱动电路32、门电路34、控制电路36以及稳压器38。
[0155]
正极端子41与电池组22的电池正极端子61连接。负极端子42与电池组22的电池负极端子62连接。es端子43是与电池组22的电池es端子连接的端子,且是供从电池组22发送来的放电允许信号或者放电禁止信号输入的端子。串行端子44是通过串行通信供从电池组22发送来的电池信息输入的端子。
[0156]
es端子43经由第一连接线48而与控制电路36连接,串行端子44经由第二连接线49而与控制电路36连接。
[0157]
驱动电路32是从电池60接受电力供给而使电流向马达50的与各相对应的各绕组流动的电路。马达50是3相无刷马达。驱动电路32是具备高边的开关元件q1~q3和低边的开关元件q4~q6的3相全桥电路。各开关元件q1~q6例如包含mosfet,但也可以包含除mosfet以外的元件。
[0158]
门电路34根据从控制电路36输出的控制信号而使驱动电路32的各开关元件q1~q6接通或者断开,并使电流依次向马达50的各相绕组流动,由此使马达50旋转。此外,在使开关元件q1~q6全部断开的情况下,马达50变成空运转的状态。另外,在使开关元件q1~q3均断开且使开关元件q4~q6均接通的情况下,马达50变成施加了所谓的短路制动的状态。
[0159]
在主开关24接通时,稳压器38从电池60接受电力供给而生成为了使控制电路36动作所需的恒定的电源电压vcc(例如直流5v)。
[0160]
控制电路36具备cpu36a、rom36b、ram36c以及i/o等。在控制电路36上连接有es端子43、串行端子44、扳机开关12、主开关24、显示部25以及电池电压检测部28。另外,虽未图示,但在控制电路36上也连接有正反切换开关9和变速拨盘23。
[0161]
电池电压检测部28检测正极端子41与负极端子42之间的电压、即电池60的电压(以下为电池电压)的值,并将检测信号向控制电路36输出。
[0162]
另外,在控制器30中,在从驱动电路32至电池60的负极的通电路径上设置有检测供给至马达50的放电电流值的电流检测部54。进一步,在马达50的附近设置有检测马达50所包含的转子的旋转位置的旋转传感器52。旋转传感器52例如是霍尔传感器、光学编码器、磁编码器等。进一步,在驱动电路32的开关元件的附近设置有温度检测部56,温度检测部56由检测开关元件的温度的热敏电阻等构成。而且,控制电路36也被输入有来自电流检测部54、旋转传感器52、温度检测部56的检测信号。控制电路36基于来自旋转传感器52的检测信号计算马达50的旋转位置和转速。
[0163]
控制电路36从稳压器38接受电力供给而进行动作。控制电路36基于各种检测信号和各种开关的操作状态,执行包含后述的主处理在内的各种处理。在本实施方式中,控制电路36相当于控制部的一个例子。
[0164]
<1
‑
3.作业机中的处理>
[0165]
<1
‑3‑
1.主处理>
[0166]
接下来,参照图3的流程图对作业机1的控制电路36执行的主处理进行说明。
[0167]
首先,在s10中,控制电路36判定是否经过了时基。控制电路36在未经过时基的情况下待机,在经过了时基的情况下进入s20的处理。时基相当于控制电路36的控制周期。
[0168]
在s20中,控制电路36执行扳机开关12的操作检测处理。详细而言,控制电路36基于来自扳机开关12的信号,检测扳机开关12是接通还是断开。
[0169]
接下来,在s30中,控制电路36基于从电池组22输出的信息来执行电池状态处理。
电池状态处理的详细内容后文叙述。
[0170]
接着,在s40中,控制电路36执行ad转换处理。详细而言,控制电路36对从电池电压检测部28、电流检测部54以及温度检测部56输入的检测信号进行ad转换。由此,控制电路36获取向马达50供给的放电电流的值、电池60的电压值以及开关元件的温度。
[0171]
接着,在s50中,控制电路36执行异常检测处理。详细而言,控制电路36将在s40中获取到的放电电流值、电压值以及温度与各自的阈值进行比较来检测过电流、电池电压的下降、开关元件的高温状态等异常。
[0172]
接下来,在s60中,控制电路36基于扳机开关12的操作状态、电池状态、异常的检测结果,执行马达控制处理。马达控制处理的详细内容后文叙述。
[0173]
接着,在s70中,控制电路36执行显示处理。详细而言,控制电路36显示马达50的动作状态、电池60的剩余容量、所检测到的异常等而报知给使用者。至此,结束本处理。
[0174]
<1
‑3‑
2.电池状态处理>
[0175]
接下来,参照图4的流程图对控制电路36在s30中执行的电池状态处理的详细内容进行说明。
[0176]
首先,在s100中,控制电路36执行电池通信处理。详细而言,控制电路36若检测到在作业机1安装有电池组22,则通过与电池组22的初始通信经由串行端子44发送作业机1的型号,并且接收电池组22的型号。进一步,控制电路36也可以通过与电池组22的初始通信接收计数映射信息。
[0177]
进一步,控制电路36经由串行端子44以规定的周期向电池控制电路65发送信息请求信号,并从电池控制电路65接收电池信息作为信息请求信号的响应。这里,与从电池组22向作业机1流动有放电电流时相比,在从电池组22向作业机1没有放电电流流动时,发送信息请求信号的周期设定得较长。即,与流动有放电电流时相比,在从电池组22向作业机1没有电流流动时,串行通信的频度设定得较低。
[0178]
另外,在从主开关24变成接通状态之后,且在马达50驱动之前的时刻,控制电路36就向电池控制电路65发送信息请求信号,来对电池组22开始请求电池信息。
[0179]
接下来,在s110中,控制电路36设定允许或者禁止来自电池组22的放电。具体地,控制电路36在从电池组22接收到放电允许信号的情况下,设置放电允许标志。另外,控制电路36在从电池组22接收到放电禁止信号的情况下,清除放电允许标志。至此,结束本处理。
[0180]
<1
‑3‑
4.马达控制处理>
[0181]
接下来,参照图5的流程图对控制电路36在s60中执行的马达控制处理的详细内容进行说明。
[0182]
首先,在s300中,控制电路36判定扳机开关12是否接通。在控制电路36判定为扳机开关12已接通的情况下,进入s310的处理,在控制电路36判定为扳机开关12断开的情况下,进入s340的处理。
[0183]
在s310中,控制电路36判定在s50中是否检测到异常。控制电路36在判定为未检测到异常的情况下,进入s320的处理。另外,控制电路36在判定为检测到异常的情况下,进入s340的处理。
[0184]
在s320中,控制电路36判定是否设置有放电允许标志。控制电路36在判定为设置有放电允许标志的情况下,进入s330的处理,在判定为清除了放电允许标志的情况下,进入
s340的处理。
[0185]
在s330中,控制电路36接受来自电池60的电力供给而执行马达驱动处理,并结束本处理。马达驱动处理的详细内容后文叙述。
[0186]
另一方面,在s340中,控制电路36判定是否实施制动控制。具体地,控制电路36在马达50旋转且即使使马达50产生制动力也对控制器30没有影响的情况下,判定为执行制动控制。在该情况下,控制电路36在s350中设置制动标志,并结束本处理。由此,停止从电池60向马达50的电力供给,而执行短路制动。
[0187]
另一方面,控制电路36在马达50未旋转的情况下及虽然马达50旋转但若使马达50产生制动力则对控制器30具有影响的情况下,判定为不实施制动控制。在该情况下,控制电路36在s360中清除制动标志,并结束本处理。由此,停止从电池60向马达50的电力供给。进而,在马达50旋转的情况下,执行空运转等。
[0188]
<1
‑3‑
5.马达驱动处理>
[0189]
接下来,参照图6的流程图对控制电路36在s330中执行的马达驱动处理的详细内容进行说明。
[0190]
首先,在s400中,控制电路36执行设定马达50的目标转速的转速设定处理。详细而言,控制电路36基于正反切换开关9的设定来设定马达50的旋转方向。进而,控制电路36基于变速拨盘23的设定来设定马达50在已设定的旋转方向上的目标转速。
[0191]
接着,在s410中,控制电路36执行设定放电电流的电流上限值的上限值设定处理。电流上限值是用于控制放电电流的值。控制电路36将放电电流的值控制为电流上限值以下。上限值设定处理的详细内容后文叙述。
[0192]
接着,在s420中,控制电路36执行脉冲宽度调制(pwm)控制中的占空比计算处理。控制电路36使用所计算出的占空比来对向马达50流动的电流进行pwm控制。在s420中,控制电路36以满足以下条件(1)和(2)的方式计算pwm控制中的占空比。条件(1)是放电电流成为在s410中所设定的电流上限值以下。条件(2)是马达50的转速向在s400中所设定的目标转速收敛。控制电路36在无法满足条件(1)、(2)双方的情况下,优先满足条件(1),在满足条件(1)的过程中,以马达50的转速尽可能地接近目标转速的方式计算占空比。
[0193]
接下来,在s430中,控制电路36执行占空比的输出处理。详细而言,控制电路36生成基于在s420中计算出的占空比的控制指令,并将所生成的控制指令向门电路34输出。至此,结束本处理。
[0194]
<1
‑3‑
6.电流上限值设定处理>
[0195]
接下来,参照图7的流程图对控制电路36在s410中执行的电流上限值设定处理的详细内容进行说明。
[0196]
首先,在s500中,判定从电池组22获取到的保护计数值是否大于计数阈值。保护计数值是通过电池控制电路65对与电池60的放电电流的大小相应的加法值进行累计(即累加)所得到的值。
[0197]
电池控制电路65在放电电流值为加法阈值以上的情况下,对保护计数值加和加法值。另外,放电电流值越大,则电池控制电路65使加法值越大。例如,在加法阈值为50a的情况下,电池控制电路65在放电电流值小于50a的情况下,不对保护计数值加和数值。另外,电池控制电路65在放电电流值为50a时对保护计数值加和加法值“1”,在放电电流值为70a时
对保护计数值加和加法值“3”。电池控制电路65按照每个控制周期,对保护计数值加和与放电电流的大小相应的加法值。由此,加法值的累计值(即累加值)成为保护计数值。由此,放电电流值越大,并且加法阈值以上的值的大小的放电电流流动的时间越长,则保护计数值变成越大的值。进一步,在放电电流值为减法阈值以下的情况下,电池控制电路65从保护计数值中减去规定值。减法阈值例如是5a。
[0198]
若变成较长时间流动较大的电流的过电流状态(即,电池60的过载状态),则电池60有可能劣化。因此,若保护计数值超过保护阈值,则电池控制电路65执行保护动作。具体地,电池控制电路65向控制电路36发送放电禁止信号。用于s500的判定的计数阈值是比保护阈值小的值,例如为保护阈值的50%~70%的值。
[0199]
即,在s500中,控制电路36在电池组22的保护功能动作之前,判定是否检测到电池组22的保护功能动作的预兆。在s500中,控制电路36在保护计数值为计数阈值以下的情况下、即未检测到电池组22的保护功能动作的预兆的情况下,进入s510的处理。另外,控制电路36在s500中保护计数值大于计数阈值的情况下,即检测到电池组22的保护功能动作的预兆的情况下,进入s520的处理。
[0200]
在s510中,控制电路36对电流上限值设定通常电流值。通常电流值是加法阈值以上的电流值。
[0201]
另一方面,在s520中,控制电路36对电流上限值设定限制电流值。限制电流值是小于加法阈值的电流值。即,限制电流值是将保护计数值保持为恒定值以下的值。
[0202]
这里,若马达50的载荷上升,则为了使马达50的转速收敛为目标转速,放电电流变大。因此,若在保护计数值超过了计数阈值的状态下马达50的载荷上升,则有可能保护计数值到达至保护阈值,电池组22的保护功能动作。若电池组22的保护功能动作,则停止电池组22的放电,不向马达50供给电力,马达50停止。进而,使用者无法继续作业,作业效率下降。
[0203]
因此,控制电路36在检测到电池组22的保护功能动作的预兆的情况下,将放电电流值限制为比加法阈值小的值。由此,即使马达50的载荷上升,但由于保护计数值不增加,因此电池组22的保护功能不动作。因此,虽然有时由于限制放电电流值,而使马达50的转速低于目标转速,但使用者能够继续使用作业机1。
[0204]
图8是表示执行本实施方式所涉及的主处理的情况下的电池组22与作业机1之间的数据流的概要的图。在电池组22中,根据放电电流和计数映射计算保护计数值。计数映射是表示放电电流值与加法值及减法值(即,负的加法值)之间的对应关系的映射(参照图19和图26)。在电池组22中,以规定周期对在计数映射中与放电电流值对应的加法值或者减法值进行累加来计算保护计数值。
[0205]
进而,从电池组22向作业机1发送所计算出的保护计数值和保存在电池组22中的保护阈值。在作业机1中,使用所接收到的保护计数值和比保护阈值小的计数阈值来限制放电电流。
[0206]
另外,也可以从电池组22向作业机1发送蓄积比率而代替保护计数值。如图9所示,蓄积比率是将保护阈值设为100%的情况下的当前的保护计数值比保护阈值之比率。在该情况下,计数阈值用相对于保护阈值的比率(例如80%)表示。
[0207]
<1
‑3‑
7.作业机的动作>
[0208]
接下来,参照图10的时序图对作业机1的动作进行说明。
[0209]
在时刻t0,若扳机开关12接通,则放电电流开始流动,马达50的转速开始上升。进而,在从时刻t1至时刻t5的期间,马达载荷逐渐变大,在时刻t5马达载荷变成零。
[0210]
在从时刻t1到时刻t2的期间,伴随马达载荷增加,放电电流也增加。进而,在时刻t2,放电电流值变成加法阈值以上,保护计数值开始增加。
[0211]
在时刻t3,放电电流到达电流上限值。此时的电流上限值是通常设定值。马达50的转速在从到达目标转速起直至时刻t3为止的期间,被保持为目标转速。
[0212]
在从时刻t3至时刻t4期间,在马达载荷增加过程中,放电电流被抑制为电流上限值。因此,在从时刻t3至时刻t4的期间,马达50的转速下降。另外,在该期间,由于放电电流值为加法阈值以上,因此保护计数值增加。
[0213]
进而,在时刻t4,若保护计数值超过计数阈值,则电流上限值被设定为限制电流值。由此,由于放电电流被抑制为小于加法阈值,因此,保护计数值的增加停止。因此,在从时刻t4到时刻t7期间,保护计数值保持为恒定值。另外,在从时刻t4到时刻t5期间,放电电流值被限制为比通常设定值小的限制电流值,因此马达50的转速进一步下降。
[0214]
在时刻t5,马达50的载荷变成零。伴随于此,放电电流变得比电流上限值小,马达50的转速返回到目标转速。
[0215]
进而,在时刻t6,若扳机开关12断开,则放电电流值变成零。即,放电电流不流动。之后,在时刻t7,伴随放电电流变得不流动,保护计数值开始减少。进一步,在时刻t8,伴随保护计数值低于了计数阈值,电流上限值设定为通常设定值。
[0216]
这里,在时刻t4,在使电流上限值为通常设定值不变的情况下,保护计数值持续增加至保护阈值。进而,在保护计数值到达了保护阈值的时刻,电池组22的保护功能动作,而使马达50停止,使用者无法继续作业。相对于此,在本实施方式中,在时刻t4,将电流上限值抑制为限制电流值,由此使用者在将扳机11断开之前的期间能够继续作业。
[0217]
<1
‑
4.电池组中的处理>
[0218]
<1
‑4‑
1.历史处理>
[0219]
接下来,参照图11的流程图对电池控制电路65执行的历史处理进行说明。
[0220]
首先,在s600中,电池控制电路65判定是否在电池组22上安装有充电器或者作业机。电池控制电路65在充电器或者作业机未安装于电池组22的情况下,反复执行s600的处理直至安装于电池组22为止。另外,电池控制电路65在充电器或者作业机安装于电池组22的情况下,进入s610的处理。
[0221]
在s610中,电池控制电路65与安装于电池组22的充电器或者作业机(以下为安装设备)进行初始通信,发送电池组22的型号,并且获取从安装设备发送来的安装设备的型号。
[0222]
接着,在s620中,电池控制电路65判定是否从电池组22拆下了安装设备。电池控制电路65在未将安装设备拆下的情况下,反复执行s620的处理,直至安装设备被拆下。另外,电池控制电路65在从电池组22拆下了安装设备的情况下,进入s630的处理。
[0223]
在s630中,电池控制电路65判定在电池组22的存储器65d内的历史数据库中,是否具有在s610中所获取到的安装设备的型号。如图12及图13所示,历史数据库分别具有存储充电器的安装次数的充电器存储区域和存储作业机的安装次数的作业机存储区域。将充电器的型号与该型号的充电器的安装次数建立起对应关系而存储在充电器存储区域中。将作
业机的型号与该型号的作业机的安装次数建立起对应关系而存储在作业机存储区域中。
[0224]
在安装设备为充电器的情况下,电池控制电路65判定在充电器存储区域中是否具有在s610中所获取到的型号。另外,在安装设备为作业机的情况下,电池控制电路65判定在作业机存储区域是否具有在s610中所获取到的型号。
[0225]
电池控制电路65在安装设备的型号不存在于历史数据库的情况下,进入s640的处理,在安装设备的型号存在于历史数据库的情况下,进入s660的处理。
[0226]
在s640中,电池控制电路65判定在历史数据库对应的存储区域是否具有空闲空间。具体地,在安装设备为充电器的情况下,电池控制电路65判定在充电器存储区域是否具有空闲空间。另外,在安装设备为作业机的情况下,电池控制电路65判定在作业机存储区域是否具有空闲空间。在历史数据库对应的存储区域没有空闲空间的情况下,电池控制电路65返回s600的处理,在对应的存储区域具有空闲空间的情况下,进入s650的处理。
[0227]
在s650中,电池控制电路65将在s610中所获取到的安装设备的型号存储于对应的存储区域。具体地,电池控制电路65在安装设备为充电器的情况下,将所获取到的型号存储于充电器存储区域的空闲空间。另外,电池控制电路65在安装设备为作业机的情况下,将所获取到的型号存储于作业机存储区域的空闲空间。
[0228]
通常,与充电器的型号的种类相比,作业机的型号的种类多很多。因此,若历史数据库仅具有一个存储区域,则作业机的型号被依次存储于存储区域,有可能存储充电器的新型号的空闲空间变没。相对于此,历史数据库由于分别具有充电器存储区域和作业域存储区域,因此即使安装于电池组22的作业机的型号的种类增加,也能够确保存储充电器的新型号的区域。
[0229]
接下来,在s660中,电池控制电路65增加与在s610中所获取到的型号对应的安装次数。具体地,电池控制电路65在安装设备为充电器的情况下,将与存储于充电设备区域的型号中的在s610中所获取到的型号对应的安装次数增加“1”。另外,电池控制电路65在安装设备为作业机的情况下,将与存储于作业机存储区域的型号中的在s610中所获取到的型号对应的安装次数增加“1”。至此,结束本处理。
[0230]
在历史处理中,当在电池组22上安装有安装设备时,获取安装设备的型号,当从电池组22拆下了安装设备时,执行型号向存储器65d的写入、及存储器65d中的安装次数的更新。当在电池组22安装有安装设备时,电池控制电路65由于执行充电控制、放电控制、与安装设备的通信等处理,因此处理载荷变高,有时没有执行向存储器65d的写入、存储器65d的更新的余裕。因此,电池控制电路65在从电池组22拆下安装设备之前、即能够实现时间上的余裕之前,保留执行向存储器65d的写入及存储器65d的更新。由此,电池控制电路65能够可靠地执行向存储器65d的写入及存储器65d的更新。
[0231]
<1
‑
5.效果>
[0232]
根据以上说明的第一实施方式,可得到以下的效果。
[0233]
(1)控制电路36基于所获取到的电池组22的状态信息,在电池组22的保护功能动作之前,降低放电电流的电流上限值。由此,由于放电电流受到限制,因此即使在作业机1的载荷比较高时,使用者也能够在电池组22的保护功能不动作的消耗电力的范围内继续作业机1的使用。另外,在保护计数值超过了保护阈值时保护功能动作。即,在应该保护电池组22时保护功能动作。由此,能够在应该进行保护时使电池组22的保护功能动作,并提高使用者
的便利性。
[0234]
(2)电池组22的过电流状态(即过载状态)能够根据放电电流的大小及放电电流流动的时间来判定。由此,控制电路36能够基于对与放电电流的大小相应的加法值或者减法值进行累加而得到的保护计数值,判定电池组22的过电流状态。
[0235]
(3)若保护计数值超过比保护阈值小的计数阈值,则降低从电池组22向马达50供给的供给电力。由此,马达50能够在电池组22的保护功能不动作的消耗电力的范围内,从电池组22继续接受电力供给。
[0236]
(4)在保护计数值超过了计数阈值的情况下,降低放电电流的电流上限值。通过降低电流上限值,从而降低放电电流值,降低向马达50的供给电力。进而,能够抑制保护计数值增加,来抑制电池组22的保护功能动作。
[0237]
(5)从马达50的驱动之前开始获取保护计数值、加法阈值以及减法阈值,并基于所获取到的这些值来变更电流上限值。由此,在使马达50暂时停止而重新启动了的情况下,电流上限值不会从暂时停止前的设定值变更为通常设定值就使马达50重新启动。由此,能够使马达50在电池组22的保护功能不动作的消耗电力的范围内重新启动。
[0238]
(6)在主开关24接通之后开始控制电路36与电池控制电路65之间的通信。因此,与仅通过将电池组22安装于作业机1便开始通信的情况相比,能够抑制电池60的消耗电力。另外,从马达50驱动之前的时刻就开始从控制电路36向电池控制电路65发送信息请求信号。因此,能够使马达50的驱动在电池组22的保护功能不动作的消耗电力的范围内开始。
[0239]
(7)从电池组22向马达50没有电流流动时,与从电池组22向马达50流动有电流时相比,电池组22的状态不易变化。因此,通过在从电池组22向马达50没有电流流动时,抑制串行通信的频度,能够抑制控制电路36和电池控制电路65的处理载荷。
[0240]
(8)基于保护计数值来设定放电电流的电流上限值,并以成为所设定的电流上限值以下的方式控制放电电流。由此,由于在电池组22的保护功能动作之前降低电流上限值,因此,能够在电池组22的保护功能不动作的消耗电力的范围内继续马达50的驱动。
[0241]
(第二实施方式)
[0242]
<2
‑
1.与第一实施方式的不同点>
[0243]
第二实施方式由于基本结构与第一实施方式相同,因此关于共同的结构省略说明,而以不同点为中心进行说明。此外,与第一实施方式相同的附图标记表示同一结构,参照在先的说明。
[0244]
在上述的第一实施方式中,电池控制电路65计算保护计数值,并将所计算出的保护计数值及计数阈值作为电池信息发送至作业机1的控制电路36。相对于此,在第二实施方式中,控制电路36在从电池组22接收计数映射信息、加法阈值以及减法阈值,并使用所接收到的内容来计算保护计数值这方面上,与第一实施方式不同。
[0245]
另外,在第一实施方式中,控制电路36在检测到电池组22的保护功能动作的预兆的情况下,降低电流上限值,而使保护计数值不超过保护阈值。相对于此,在第二实施方式中,控制电路36在检测到电池组22的保护功能动作的预兆的情况下,降低pwm控制中的占空比上限值,而使保护计数值不超过保护阈值。即,在第一实施方式中,通过将电流上限值设为比通常的值小的值,从而降低了放电电流值。相对于此,在第二实施方式中,通过将占空比上限值设为比通常的值小的值,从而降低放电电流值。
[0246]
具体地,第二实施方式关于图5所示的马达控制处理的s330中的马达驱动处理与第一实施方式不同。在第一实施方式中,控制电路36在s330中的马达驱动处理中,执行了图6和图7所示的流程图所示的处理。相对于此,在第二实施方式中,控制电路36在s330中的马达驱动处理中,执行图14~图16的流程图所示的处理。
[0247]
<2
‑
2.作业机中的处理>
[0248]
<2
‑2‑
1.马达驱动处理>
[0249]
接下来,参照图14的流程图对控制电路36在s330中执行的马达驱动处理的详细内容进行说明。
[0250]
首先,在s700中,控制电路36执行与图6所示的s400相同的处理。
[0251]
接下来,在s710中,控制电路36执行计算保护计数值的保护计数处理。保护计数处理的详细内容后文叙述。
[0252]
接着,在s720中,控制电路36执行设定pwm控制中的占空比的上限值的占空比上限值设定处理。占空比上限值设定处理的详细内容后文叙述。
[0253]
接下来,在s730中,控制电路36执行pwm控制中的占空比计算处理。具体地,控制电路36以满足条件(3)和(4)的方式计算占空比。以下的条件(3)是占空比为在s720中所设定的占空比上限值以下。条件(4)是马达50的转速向在s700中所设定的目标转速收敛。控制电路36在无法满足条件(3)、(4)双方的情况下,优先满足条件(3),在满足条件(4)的过程中,以马达50的转速尽可能地接近目标转速的方式计算占空比。
[0254]
接下来,在s740中,控制电路36执行与图6所示的s430相同的处理。至此,结束本处理。
[0255]
<2
‑2‑
2.保护计数处理>
[0256]
接下来,参照图15的流程图对控制电路36在s710中执行的保护计数处理的详细内容进行说明。
[0257]
首先,在s800中,控制电路36判定通过电流检测部54检测出的放电电流值是否为加法阈值以上。
[0258]
控制电路36在放电电流值为加法阈值以上的情况下,进入s810的处理,在放电电流值小于加法阈值的情况下,进入s830的处理。
[0259]
在s810中,使用所接收到的计数映射,来计算与放电电流的大小相应的正值的加法值。如图19所示,放电电流值越大,则控制电路36计算出越大的加法值。例如,控制电路36在放电电流值为50a时计算出加法值“1”,在放电电流值为70a时计算出加法值“3”。
[0260]
接着,在s820中,控制电路36对保护计数值加和在s810中所计算出的加法值来更新保护计数值,并结束本处理。
[0261]
另一方面,在s830中,控制电路36判定放电电流值是否为减法阈值以下。减法阈值是比加法阈值小的值,例如为5a。控制电路36在放电电流值为减法阈值以下的情况下,进入s840的处理,在放电电流值大于减法阈值的情况下,结束本处理。
[0262]
在s840中,控制电路36根据所接收到的计数映射计算作为恒定值的减法值,并从保护计数值减去所计算出的减法值来更新保护计数值。至此,结束本处理。
[0263]
<2
‑2‑
3.占空比上限值设定处理>
[0264]
接下来,参照图16的流程图对控制电路36在s720中执行的占空比上限值设定处理
的详细内容进行说明。
[0265]
首先,在s900中,控制电路36判定保护计数值是否大于计数阈值。控制电路36在保护计数值为计数阈值以下的情况下,进入s910的处理,在保护计数值大于计数阈值的情况下,进入s920的处理。
[0266]
在s910中,控制电路36对占空比上限值设定通常占空比。通常占空比是将放电电流值设为加法阈值以上的值的占空比,例如为100%。
[0267]
另一方面,在s920中,控制电路36对占空比上限值设定限制占空比。限制占空比是将放电电流值设为小于加法阈值的值的占空比,是比通常占空比小的值。至此,结束本处理。
[0268]
图17是表示在执行本实施方式所涉及的主处理的情况下的电池组22与作业机1之间的数据流的概要的图。从电池组22向作业机1发送计数映射、加法阈值、减法阈值、保护阈值。在作业机1中,使用放电电流值、和接收到的计数映射、加法阈值、保护阈值,来计算保护计数值。进而,在作业机1中,使用计算出的保护计数值和根据接收到的保护阈值计算出的计数阈值来限制占空比。
[0269]
<2
‑
3.效果>
[0270]
根据以上说明的第二实施方式,起到第一实施方式的效果(1)~(3)、(6)、(7),并且起到以下的效果(9)。
[0271]
(9)在保护计数值超过了计数阈值的情况下,降低占空比上限值。通过降低占空比上限值,从而降低放电电流,降低从电池组22向马达50的供给电力。进而,能够抑制保护计数值的增加,抑制电池组22的保护功能动作。
[0272]
(第三实施方式)
[0273]
<3
‑
1.与第一实施方式的不同点>
[0274]
第三实施方式由于基本结构与第一实施方式相同,因此对于共同的结构省略说明,而以不同点为中心进行说明。此外,与第一实施方式相同的附图标记表示同一结构,参照此前的说明。
[0275]
在第一实施方式中,计数阈值是固定值。相对于此,在第三实施方式中,在计数阈值为基于控制电路36从电池组22接收到的状态信息而设定的可变值这方面上,与第一实施方式不同。
[0276]
具体地,在第三实施方式中,图6所示的马达驱动处理的s410中的电流上限值设定处理与第一实施方式不同。在第一实施方式中,控制电路36在s410中的电流上限值设定处理中执行图7的流程图所示的处理。相对于此,在第三实施方式中,控制电路36在s410中的电流上限值设定处理中执行图18的流程图所示的处理。
[0277]
<3
‑
2.电流上限值设定处理>
[0278]
接下来,在本实施方式中,参照图18所示的流程图对控制电路360在s410中执行的电流上限值设定处理的详细内容进行说明。
[0279]
首先,在s505中,控制电路36设定计数阈值。详细而言,控制电路36基于由电流检测部54检测出的放电电流的大小和从电池组22接收到的计数映射信息,来设定计数阈值。如图19所示,计数映射信息表示放电电流的大小与加法值及减法值之间的对应关系。这里的加法值包含正值和零,减法值包含负值。放电电流值越大,则加法值变成越大的值,减法
值为恒定的值。
[0280]
控制电路36使用计数映射信息来获取与检测出的放电电流的大小对应的加法值。进而,控制电路36计算对保护计数值加和所获取到的加法值的情况下的保护计数值的上升率,并根据所计算出的上升率来设定计数阈值。例如,在上升率比所设定的上升率阈值高的情况下,控制电路36以立即对放电电流进行限制的方式,将计数阈值设定为比较小的值,在上升率为上升率阈值以下的情况下,将计数阈值设定为比较大的值。
[0281]
另外,即使流动有相同大小的放电电流,但与电池温度比较低的情况相比,在电池温度比较高的情况下电池60易劣化。由此,也可以将计数映射信息依不同电池温度分类。例如,如图19所示,也可以通过电池温度为th℃以上的情况和电池温度小于th℃的情况将计数映射信息分类。在该情况下,控制电路36只要基于所检测出的放电电流的大小和从电池组22接收到的电池温度及计数映射信息来设定计数阈值即可。
[0282]
进一步,即使流动有相同大小的放电电流,但在电池60的剩余容量比较小的情况下,与剩余容量比较大的情况相比,电池60易劣化。由此,也可以将计数映射信息依不同电池温度及不同剩余容量分类。在该情况下,控制电路36只要基于所检测出的放电电流的大小和从电池组22接收到的电池温度、剩余容量以及计数映射信息来设定计数阈值即可。
[0283]
接下来,在s515~s535的处理中,控制电路36执行与图7所示的s500~s520相同的处理。
[0284]
图20是表示执行本实施方式所涉及的主处理的情况下的电池组22与作业机1之间的数据流的概要的图。在电池组22中,根据放电电流值和计数映射计算保护计数值。计数映射也可以是与电池温度和/或剩余容量相应的映射。
[0285]
进而,从电池组22向作业机1发送所计算出的保护计数值和计数映射。在作业机1中,根据所接收到的保护计数值和计数映射计算计数阈值。进一步,在作业机1中,使用所接收到的保护计数值和所计算出的计数阈值来对放电电流进行限制。
[0286]
<3
‑
3.效果>
[0287]
根据以上说明的第三实施方式,起到第一实施方式的效果(1)~(8),并且起到以下的效果(10)。
[0288]
(10)控制电路36通过使用计数映射信息,能够根据放电电流的大小而使计数阈值变化。进而,控制电路36能够根据放电电流的大小而适当地对供给电力进行限制。特别是,控制电路36在使用对应于不同电池温度和/或不同剩余容量的计数映射信息的情况下,能够更加适当地限制供给电力。
[0289]
(第四实施方式)
[0290]
<4
‑
1.与第一实施方式的不同点>
[0291]
第四实施方式由于基本结构与第一实施方式相同,因此对于共同的结构省略说明,而以不同点为中心进行说明。此外,与第一实施方式相同的附图标记表示同一结构,参照此前的说明。
[0292]
在上述的第一实施方式中,电池控制电路65计算保护计数值,并将计算出的保护计数值和计数阈值作为电池信息向作业机1的控制电路36发送。相对于此,在第四实施方式中,从电池控制电路65向控制电路36发送保护计数值和计数映射。进而,控制电路36从电池控制电路36接收保护计数值,并且以比接收保护计数值的周期短的周期,由自身计算保护
计数值。
[0293]
具体地,第四实施方式关于图4所示的电池状态处理的s100中的电池通信处理与第一实施方式不同。在第四实施方式中,控制电路36在s100中的电池通信处理中,执行图21的流程图所示的处理。另外,在图6所示的马达驱动处理的s400与s410的处理之间,执行图22所示的保护计数处理。进一步,在图6所示的马达驱动处理的s410中的电流上限值设定处理中,执行图24或者图25的流程图所示的处理。
[0294]
<4
‑
2.作业机中的处理>
[0295]
<4
‑2‑
1.电池通信处理>
[0296]
接下来,参照图21的流程图对控制电路36在s100中执行的电池通信处理的详细内容进行说明。
[0297]
在s105中,控制电路36判定初始通信是否已完成。在s105中,在判定为初始通信未完成的情况下,进入s115的处理,在判定为初始通信已完成的情况下,进入s125的处理。
[0298]
在s115中,控制电路36执行初始通信处理。具体地,控制电路36从电池控制电路65接收计数映射、加法阈值、减法阈值、保护阈值、计数阈值以及后述的时间阈值。图26表示计数映射的一个例子。该计数映射也可以是与电池温度和/或剩余容量相应的计数映射。另一方面,在s125中,接收通过电池控制电路65所计算出的保护计数值。
[0299]
此外,控制电路36也可以在除作业机1与电池组22连接上时的初次通信以外,也从电池控制电路65接收计数映射等。例如,控制电路36也可以在来自电池组22的电力供给停止而使作业机1停止之后,作业机1接受电力的再供给而重新启动时,从电池控制电路65接收计数映射等。
[0300]
<4
‑2‑
2.保护计数处理>
[0301]
接下来,参照图22的流程图对控制电路36在s400与s410的处理之间执行的保护计数处理的详细内容进行说明。
[0302]
首先,在s205中,执行保护计数值计算处理来计算保护计数值。计算保护计数值的处理的详细内容后文叙述。
[0303]
接下来,在s215中,控制电路36通过与电池组22间的通信判定是否获取到当前时刻的保护计数值。当前时刻的保护计数值例如是本次的保护计数处理循环与从本次的保护计数处理循环回溯了规定期间的时刻之间的保护计数值。或者,当前的保护计数值是上次的保护计数处理循环与本次的保护计数处理循环之间的保护计数值。上述的电池通信处理的周期由于比保护计数处理的周期长,因此在保护计数处理的循环之间,存在能够从电池组22获取保护计数值的情况与无法获取保护计数值这种情况。
[0304]
在s215中,在判定为获取到保护计数值的情况下,进入s225的处理,在判定为未获取到保护计数值的情况下,结束本处理。
[0305]
在s225中,控制电路36将控制电路36具有的电池保护计数值更新为从电池组22获取到的保护计数值,并结束本处理。即,控制电路36在从电池组22获取到当前时刻的保护计数值的情况下,与控制电路36所计算出的保护计数值相比,优先使用从电池组22获取到的保护计数值。另外,控制电路36在未从电池组22获取到当前时刻的保护计数值的情况下,使用控制电路36所计算出的保护计数值。
[0306]
<4
‑2‑
2.保护计数值计算处理>
[0307]
接下来,参照图23的流程图对控制电路36在s205中执行的保护计数值计算处理的详细内容进行说明。
[0308]
首先,在s305~s345中,执行与图15所示的s800~s840相同的处理。即,在s325及s345中,将保护计数值更新为对保护计数值加和加法值所得到的值或者从保护计数值减去减法值所得到的值。
[0309]
此时,更新前的保护计数值是在上次的保护计数处理计算处理循环中所计算出的值、或者是在s225中更新为来自电池组22的获取值的保护计数值。因此,控制电路36执行电池通信处理而从电池控制电路65获取保护计数值。进而,控制电路36在电池通信处理的循环之间,对通过最近的通信从电池控制电路65获取到的保护计数值累加加法值或者减法值,来计算当前时刻的保护计数值。
[0310]
<4
‑2‑
3.电流上限值设定处理>
[0311]
接下来,参照图24的流程图对控制电路36在s410中执行的电流上限值设定处理的详细内容进行说明。
[0312]
在s405中,控制电路36执行至电池组22成为过载停止为止的时间预测处理。电池组22在保护计数值到达了保护阈值的情况下,由于过载而输出放电禁止信号,成为放电停止状态。控制电路36使用所接收到的计数映射,来预测直至保护计数值到达保护阈值为止的时间。
[0313]
在s415中,控制电路36判定在s405中所预测出的直至停止为止的时间是否小于时间阈值。在s415中,在判定为至停止为止的时间为时间阈值以上的情况下,进入s425的处理,在判定为直至停止为止的时间小于时间阈值的情况下,进入s435的处理。即,控制电路36在根据直至停止为止的时间与时间阈值之间的比较,检测到电池组22执行保护动作的预兆的情况下,进入s435的处理,在未检测到预兆的情况下,进入s425的处理。
[0314]
在s425中,控制电路36对电流上限值设定通常电流值。通常电流值为加法阈值以上的电流值。即,通常电流值是使保护计数值增加的值。
[0315]
另一方面,在s435中,控制电路36对电流上限值设定限制电流值。限制电流值也可以是小于加法阈值的电流值。即,限制电流值也可以是将保护计数值保持为恒定值以下的值。
[0316]
或者,如图27所示,电流限制值也可以是根据保护计数值而设定的值。例如,如图26所示,在保护计数值为保护阈值的60%的值的情况下,以将加法值限制为2以下的方式将电流限制值设定为70a。进而,在保护计数值上升至保护阈值的80%的值的情况下,以将加法值限制为1以下的方式将电流限制值设定为60a。进一步,在保护计数值上升至保护阈值的90%的值的情况下,以将加法值限制为0以下的方式将电流限制值设定为50a。即,也可以不是突然将放电电流限制为加法值成为0以下的值,而是以保护计数值的增加变得缓慢的方式对放电电流进行限制,在保护计数值即将到达保护阈值之前,将放电电流限制为保护计数值不增加的值。这样,与突然将放电电流限制为加法值成为0以下的值的情况相比,不会尽可能地使作业机的输出下降,使用者能够继续使用。
[0317]
<4
‑2‑
3.电流上限值设定处理的另一例>
[0318]
接下来,参照图25的流程图对控制电路36在s410中执行的电流上限值设定处理的另一例的详细内容进行说明。
[0319]
在s505、s515以及s545中,执行与s405~s435相同的处理。
[0320]
进而,在s515中,在判定为直至停止为止的时间为时间阈值以上的情况下,进入s525的处理。在s525中,控制电路36判定保护计数值是否大于计数阈值。在s525中,在判定为保护计数值大于计数阈值的情况下,进入s545的处理,对电流上限值设定限制电流值。
[0321]
另一方面,在s525中,在判定为保护计数值为计数阈值以下的情况下,进入s535的处理,对电流上限值设定通常电流值。即,在电流上限值设定处理的另一例中,根据直至停止为止的时间与时间阈值之间的比较和保护计数值与计数阈值之间的比较,检测电池组22执行保护动作的预兆。
[0322]
图28是表示执行本实施方式所涉及的主处理的情况下的电池组22与作业机1之间的数据流的概要的图。在初始通信中,从电池组22向作业机1发送计数映射、加法阈值、减法阈值、保护阈值以及时间阈值。另外,在电池组22中,计算保护计数值,并以规定的周期向作业机1发送所计算出的保护计数值。
[0323]
在作业机1中,根据所接收到的保护计数值、计数映射以及放电电流值,计算当前时刻的保护计数值。进而,在作业机1中,使用所计算出的当前时刻的保护计数值和时间阈值来对放电电流进行限制。或者,在作业机1中,使用所计算出的当前时刻的保护计数值、时间阈值以及根据接收到的保护阈值所计算出的计数值来对放电电流进行限制。
[0324]
<4
‑
3.效果>
[0325]
根据以上说明的第四实施方式,起到第一实施方式的效果(1)~(8),并且起到以下的效果(11)~(12)。
[0326]
(11)控制电路36在从电池组22获取到当前时刻的保护计数值的情况下,与控制电路36所计算出的保护计数值相比,优先使用从电池组22获取到的保护计数值。因此,控制电路36由于尽可能地使用与电池组22用来执行保护动作的值相同的值,因此能够高精度地检测电池组22执行保护动作的预兆。
[0327]
(12)通过控制电路36对既往从电池组22获取到的保护计数值加和加法值或者减去减法值来计算保护计数值。因此,控制电路36由于尽可能地使用电池组用来执行保护动作的值,因此能够高精度地检测电池组22执行保护动作的预兆。
[0328]
(第五实施方式)
[0329]
<5
‑
1.与第一实施方式的不同点>
[0330]
第五实施方式由于基本结构与第一实施方式相同,因此对于共同的结构省略说明,而以不同点为中心进行说明。此外,与第一实施方式相同的附图标记表示同一结构,参照此前的说明。
[0331]
在上述的第一实施方式中,控制电路36在检测到由电池组22执行保护动作的预兆的情况下,抑制放电电流,抑制了电池组22的过载状态的进行。相对于此,在第五实施方式中,控制电路36在当检测到由电池组22执行保护动作的预兆的情况下,使马达50暂时停止,而促使电池组22恢复这方面上,与第一实施方式不同。在第五实施方式中,控制电路36代替s410中的电流上限值设定处理,而执行图29的流程图所示的过载停止处理。
[0332]
如图19和图26的计数映射所示,若马达50停止而使放电电流变成0a,则从保护计数值减去减法值,保护计数值减小。在保护计数值减小至规定值之后,使马达50重新启动,由此与电池组22执行保护动作的情况相比,作业机1的停止时间被抑制为比较短的时间。若
电池组22执行保护动作而输出放电禁止信号,则马达50的停止期间例如为3~5分钟。相对于此,当作业机1在由电池组22执行保护动作之前使马达50停止的情况下,马达50的停止期间例如为20~30秒。
[0333]
<5
‑
2.过载停止处理>
[0334]
接下来,参照图29所示的流程图对控制电路36代替s410中电流上限值设定处理而执行的过载停止处理的详细内容进行说明。
[0335]
首先,在s605中,控制电路36判定是否清除了停止标志。在设置有停止标志的情况下,在s50的处理中,控制电路36检测到异常。其结果为,停止从电池60向马达50的电力供给,马达50停止。
[0336]
在s605中,判定为清除了停止标志的情况下,进入s615的处理。在s615中,控制电路36判定保护计数值是否比设定的停止阈值大。在s615中,在判定为保护计数值大于停止阈值的情况下,进入s625的处理,在判定为保护计数值为停止阈值以下的情况下,进入s645的处理。
[0337]
在s625中,控制电路36设置停止标志。接下来,在s635中,控制电路36对停止阈值设定第二计数值,并结束本处理。第二计数值是比电池组22执行保护动作的保护阈值小的值。在本实施方式中,第二计数值相当于第二停止阈值的一个例子。
[0338]
另一方面,在s645中,控制电路36判定保护计数值是否小于第三计数值。第三计数值是比第二计数值小的值。在s645中,在判定为保护计数值小于第三计数值的情况下,进入s655的处理,在判定为保护计数值为第三计数值以上的情况下,结束本处理。
[0339]
在s655中,控制电路36对停止阈值设定第一计数值,并结束本处理。第一计数值是小于第二计数值且大于第三计数值的值。在本实施方式中,第一计数值相当于第一停止阈值的一个例子。
[0340]
另外,在s605中,在判定为设置有停止标志的情况下,进入s665的处理。在s665中,控制电路36判定保护计数值是否小于第一计数值。在s665中,在判定为保护计数值小于第一计数值的情况下,进入s675,在判定为保护计数值为第一计数值以上的情况下,结束本处理。在s675中,控制电路36清除停止标志,并结束本处理。
[0341]
<5
‑
3.作业机的动作>
[0342]
接下来,参照图30的时序图对控制电路36执行了过载停止处理的情况下的作业机1的动作进行说明。在图30所示的保护计数值的时序图中,阴影部分表示马达50的停止期间。另外,阴影部分中的点阴影部分表示通过扣动扳机11而使马达50能够重新启动的期间,斜线的阴影部分与有无扳机11的操作无关,表示禁止马达50重新启动的期间。
[0343]
在时刻t10,扳机11被扣动而使扳机开关12接通,流动有加法阈值以上的放电电流,保护计数值开始增加。此时,对停止阈值设定有第一计数值。
[0344]
在时刻t11,若保护计数值超过停止阈值(=第一计数值),则对停止阈值设定第二计数值。另外,马达50暂时停止,进入马达50能够重新启动的期间。由于马达50停止,放电电流不流动,因此保护计数值开始减小。
[0345]
进而,若在时刻t12,扳机11被松开而使扳机开关12暂时断开,在时刻t13,扳机11被扣动而使扳机开关12接通,则马达50重新启动,放电电流流动。
[0346]
进而,在时刻t14,若保护计数值超过停止阈值(=第二计数值),则马达50停止,进
入马达50不能重新启动的期间。与从时刻t10到时刻t11的期间相比,从时刻t13到时刻t14的期间马达50的载荷变大,放电电流值变大。因此,与从时刻t10到时刻t11的期间相比,在从时刻t13到时刻t14的期间,保护计数值的增加率变大。
[0347]
另外,在时刻t14,若马达50停止,则保护计数值开始减小。在时刻t15,扳机11被松开而使扳机开关12断开,在时刻t16,扳机11被扣动而使扳机开关12接通。然而,由于是马达50不能重新启动的期间,因此马达50维持为停止状态,放电电流不流动。在时刻t11,若通过马达50暂时停止,而继续作业机1的使用,则使用者能够识别出马达50的不能重新启动的期间到来。
[0348]
在时刻t17,扳机11被松开而使扳机开关12断开。在时刻t18,保护计数值变成第一计数值以下,从马达50不能重新启动的期间向能够重新启动的期间转移。
[0349]
进而,在时刻t19,若扳机11被扣动而使扳机开关12接通,则马达50重新启动,放电电流流动。在时刻t20,若保护计数值再次超过停止阈值(=第二计数值),则马达50停止,进入马达50不能重新启动的期间。
[0350]
与从时刻t13到时刻t14的期间相比,从时刻t19到时刻t20的期间,马达50的载荷变小,放电电流值变小。因此,与从时刻t13到时刻t14的期间相比,在从时刻t19到时刻t20的期间,保护计数值的增加率变小。
[0351]
另外,在时刻t20,若马达50停止,则保护计数值开始减小。在时刻t21,扳机11被松开而使扳机开关12断开。在时刻t22,保护计数值变成第一计数值以下,从马达50不能重新启动的期间向能够重新启动的期间转移。然而,由于扳机11未被扣动,因此马达50不会重新启动,保护计数值继续减小。
[0352]
进而,在时刻t23,若保护计数值小于第三计数值,则对停止阈值设定第一计数值。在时刻t24,若扳机11被扣动而使扳机开关12接通,则马达50重新启动,放电电流开始流动。另外,保护计数值开始增加。在时刻t25,若保护计数值超过停止阈值(=第一计数值),则马达50停止,进入马达50能够重新启动的期间。在本实施方式中,由于未对放电电流进行限制,因此放电电流跨整个期间地根据马达50的载荷变化而变化。
[0353]
<5
‑
4.效果>
[0354]
根据以上说明的第五实施方式,起到以下的效果(13)~(15)。
[0355]
(13)控制电路36在执行由电池组22进行的保护动作之前使马达50停止。由此,与电池组22执行保护动作的情况相比,能够使电池组22以比较短的时间恢复。进而,使用者能够经过作业机1比较短的停止期间而继续作业机1的使用。另外,使用者能够在未对电池组22的输出进行限制的状态下继续作业机1的使用。
[0356]
(14)若保护计数值超过比保护阈值小的停止阈值,则马达50停止。由此,保护计数值减小。其结果为,能够经过马达50比较短的停止期间而使电池组22恢复。进而,马达50能够在比较短的停止期间后从电池组22继续接受电力供给。
[0357]
(15)在保护计数值超过了设定有第一计数值的停止阈值的情况下,马达50停止,在马达50停止后,在扳机11受到了操作的情况下,马达50重新启动。进一步,在保护计数值超过了设定有第二计数值的停止阈值的情况下,马达50停止,在保护计数值低于第一计数值之前,禁止马达50的重新启动。由此,使用者能够在马达50暂时停止时,通过操作扳机11而继续作业机1的使用,并且通过继续使用,能够识别出作业机1不能使用的期间到来。
[0358]
(其他实施方式)
[0359]
以上,对用于实施本公开的方式进行了说明,但本公开并不限于上述实施方式,能够进行各种变形而实施。
[0360]
(a)在上述各实施方式中,电池组22在保护计数值超过了保护阈值的情况下保护功能动作,但本公开并不限于此。电池组22也可以在电池60的剩余容量低于了第一容量阈值的情况下,保护功能动作。即,也可以在电池组22变成了过放电状态的情况下,保护功能动作而变成放电禁止。
[0361]
进而,控制电路36也可以在从电池组22获取到的剩余容量低于了第二容量阈值的情况下,对电流上限值设定限制电流值。或者,控制电路36也可以在所获取到的剩余容量低于了第二容量阈值的情况下,对占空比上限值设定限制占空比。第二容量阈值是比第一容量阈值大的值。在该情况下,控制电路36在剩余容量低于了第二容量阈值的情况下,检测保护功能动作的预兆。
[0362]
(b)另外,电池组22也可以在电池温度超过了第一温度阈值的情况下,保护功能动作。即,也可以在电池组22变成了高温状态的情况下,保护功能动作而变成放电禁止。
[0363]
而且,控制电路36也可以在从电池组22获取到的电池温度超过了第二温度阈值的情况下,对电流上限值设定限制电流值。或者,控制电路36也可以在所获取到的电池温度超过了第二温度阈值的情况下,对占空比上限值设定限制占空比。第二温度阈值是比第一温度阈值小的值。在该情况下,控制电路36在电池温度超过了第二温度阈值的情况下,检测保护功能动作的预兆。
[0364]
(c)在第一实施方式中,在保护计数值为计数阈值以下的情况下,对电流上限值设定了通常电流值,但也可以在保护计数值为计数阈值以下的情况下不设定电流上限值。在该情况下,控制电路36只要在s420的处理中以满足条件(2)的方式计算占空比即可。
[0365]
(d)在第一实施方式中,将电流上限值设定为两个阶段的值中任一个值,但也可以设定为三个阶段以上的值中任一个值。例如,作为比保护阈值小的阈值,设定第一计数阈值和比第一计数阈值小的第二计数阈值。进而,控制电路36在保护计数值小于第二计数阈值小的情况下,对电流上限值设定通常电流值。另外,控制电路36在保护计数值为第一计数阈值以上的情况下对电流上限值设定第一限制电流值,在保护计数值小于第一计数阈值且为第二计数阈值以上的情况下,对电流上限值设定第二限制电流值。第一电流限制值和第二电流限制值均为比加法阈值小的值,第一电流限制值为比第二电流限制值小的值。同样地,在第二实施方式中,也可以将占空比上限值设定为三个阶段以上的值中任一个值。
[0366]
(e)也可以将第一实施方式与第二实施方式组合。具体地,在第一实施方式中,也可以如第二实施方式那样,作业机1的控制电路36代替从电池控制电路65接收保护计数值,而计算保护计数值。在该情况下,电池控制电路65也可以不计算保护计数值。
[0367]
另外,在第二实施方式中,也可以如第一实施方式那样,电池控制电路65计算保护计数值。在该情况下,作业机1的控制电路36也可以代替计算保护计数值,而从电池控制电路65接收保护计数值、加法阈值以及减法阈值。
[0368]
(f)在第三实施方式中,在s505的处理中,控制电路36基于放电电流的大小等和计数映射信息,设定了计数阈值,但也可以基于放电电流的大小等和计数映射信息,设定限制电流值。例如,控制电路36也可以在根据计数映射信息所推定出的保护计数值的上升率比
较大的情况下,将限制电流值设定为比较小的值,在保护计数值的上升率比较小的情况下,将限制电流值设定为比较大的值。
[0369]
(g)在上述各实施方式中,分别构成第二连接线49和第二电池连接线69的通信线并不限于一根,也可以是两根。在第二连接线49和第二电池连接线69包含两根通信线的情况下,一根通信线是从控制电路36向电池控制电路65发送数据的发送专用线,另一根通信线是从电池控制电路65向控制电路36发送数据的发送专用线。在第二连接线49和第二电池连接线69包含两根通信线的情况下,串行端子44和电池串行端子64各自包含两个串行通信用的端子。进而,两根通信线分别与串行通信用的端子连接。这样,在第二连接线49和第二电池连接线69包含两根通信线的情况下,与仅包含一根通信线的情况相比,能够提高控制电路36与电池控制电路65之间的通信速度。即使这样,也能够适当限制从电池组22向马达50的供给电力。
[0370]
(h)本公开并不限于向割草机的应用,例如也可应用于电锯、绿篱机、理发器、冲击起子等电动工具等构成为通过旋转力驱动作业工具的各种作业机。
[0371]
(i)控制电路36和电池控制电路65也可以代替微型计算机、或者在微型计算机的基础上,具备单独的各种电子部件的组合,也可以具备application specified integrated circuit(asic:专用集成电路),也可以具备application specific standard product(assp:专用标准产品),例如可以具备field programmable gate array(fpga:现场可编程门阵列)等可编程序逻辑设备,或者也可以具备它们的组合。
[0372]
(j)也可以通过多个构成要素实现上述实施方式中的一个构成要素具有的多个功能,或者通过多个构成要素实现一个构成要素具有的一个功能。另外,也可以通过一个构成要素实现多个构成要素具有的多个功能,或者通过一个构成要素实现由多个构成要素实现的一个功能。另外,也可以省略上述实施方式的结构的一部分。另外,也可以将上述实施方式的结构的至少一部分相对于其他的上述实施方式的结构进行附加或者置换。
[0373]
(k)除上述的电动作业机以外,也能够通过将该电动作业机和电池组作为构成要素的系统、马达驱动方法等各种方式实现本公开。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1