一种包含恰约束支链的两自由度部分解耦并联机构的制作方法
[0001]
本发明涉及并联连接机构领域,更具体的说,尤其涉及一种包含恰约束支链的两自由度部分解耦并联机构。
背景技术:
[0002]
并联机构于1938年首次被提出,主要的特点在于输出平台通过两条及以上的运动支链与固定平台连接构成空间多自由度多环闭链结构。并联机构因其具有强承载能力、高刚度、高精度等优点,被广泛应用于机器人结构、数控机床、多维传感器及运动模拟设备等领域。
[0003]
并联机构具有两个以上的自由度,其输出平台向各个自由度的运动都是所有驱动单元的运动合成,且各驱动单元的运动与并联机构整体运动(即输入与输出)之间是非线性的,这将导致并联机构运动模型建立困难,运动控制复杂。并联机构的运动解耦是机构学研究的热点,可实现输出平台在某个自由度的运动不需要各个驱动单元的配合运动,具有运动建模简单、运动精度高、控制容易的优势。
[0004]
目前对空间两自由度转动解耦并联机构的研究较少,现有的两自由度转动解耦并联机构如专利103624559a提出的一种两转动完全解耦并联机构、专利103286778a提出的两自由度转动解耦并联机构都采用旋转副作为驱动关节,且三条支链分布较广,存在机构体积远大于动平台工作空间、结构不紧凑、负载能力较弱的不足。
技术实现要素:
[0005]
本发明的目的在于解决现有的并联机构三条支链分布较广导致的机构体积大于动平台工作空间、结构不紧凑和负载能力较弱的问题,提出了一种包含恰约束支链的两自由度部分解耦并联机构,结构紧凑、精度高、刚度高,可实现平台的转动部分解耦。
[0006]
本发明通过以下技术方案来实现上述目的:一种包含恰约束支链的两自由度部分解耦并联机构,包括静平台总成、动平台总成和三条支链总成,三条支链总成分别为第一支链总成、第二支链总成和第三支链总成,所述静平台总成和动平台总成通过三条支链总成连接;
[0007]
所述静平台总成包括基座固定板、推杆筒、基座中间件和第一阶梯轴,所述推杆筒设置有两个,且两个推杆筒均竖直固定在基座固定板的一侧,两个推杆筒的轴心线垂直于基座固定板设置,所述基座固定板中部开设有光孔,基座中间件顶部设置有竖直设置的定位杆,基座中间件上的定位杆穿过穿过基座固定板上光孔,基座中间件通过内六角螺栓固定在所述基座固定板上;所述基座中间件整体呈倒u型,基座中间件的两条侧边的耳部开设有定位孔,两个第一阶梯轴分别穿过基座中间件上的两个定位孔且两个第一阶梯轴固定在基座中间件上,两个第一阶梯轴的轴心线与基座固定板的上表面相平行;
[0008]
所述动平台总成包括第五连接件、第二阶梯轴、立板、垫板和关节轴承,所述关节轴承内嵌在所述垫板的中部,垫板的左右两侧分别设置有一块竖直设置的立板,两块立板
平行设置且对称设置在关节轴承的两侧,两个第二阶梯轴分别固定在两块立板的上端,其中一个第二阶梯轴远离另一个第二阶梯轴的一侧固定有第五连接件,所述第五连接件呈轴状,第五连接件和两个第二阶梯轴的轴心线在同一条直线上且第五连接件和两个第二阶梯轴的轴心线垂直于立板设置;
[0009]
所述第一支链总成包括第一推杆和第一连接件,所述第一推杆的上端设置在静平台总成的一个推杆筒内,第一推杆的下端设置有轴套;所述第一连接件的一端设置有第一连接阶梯轴,第一连接件的另一端设置有第一连接套筒,第一推杆下端的轴套与第一连接件一端的第一连接阶梯轴通过轴承连接,所述动平台总成的第五连接件套装在所述第一连接件另一端的第一连接套筒内;
[0010]
所述第二支链总成包括包括第二推杆、第二连接件、第三连接件和第四连接件,所述第二推杆的上端设置在静平台总成的另一个推杆筒内,第二推杆的下端设置有轴套;所述第二连接件的一端设置有第二连接阶梯轴,第二连接件的另一端设置有第二连接套筒,第二推杆下端的轴套与第二连接件一端的第二连接阶梯轴通过轴承连接,所述第三连接件套装在第二连接件另一端的第二连接套筒内;第三连接件的一端固定连接在l型的第四连接件的一侧侧边的端部,第四连接件的另一条侧边的端部与动平台总成的关节轴承固定连接;
[0011]
所述第三支链总成包括方形环件、圆形轴承座和圆形配合轴承,方形环件的剖面呈正方形,方形环件的四个侧面的中部均固定有一个圆形轴承座,每个圆形轴承座内部设置有一个圆形配合轴承;所述静平台总成的两个第一阶梯轴与其中两个相对设置的圆形配合轴承配合连接;所述动平台总成的两个第二阶梯轴与另外两个相对设置圆形配合轴承配合连接。
[0012]
进一步的,所述基座固定板整体呈凸型,基座固定板上靠近推杆筒的一侧表面上开有一道铣槽,两根推杆筒通过铣槽在基座固定板上定位以保证两根推杆筒的平行。
[0013]
进一步的,所述推杆筒包括推杆筒壁和推杆筒固定板,所述推杆筒壁固定在推杆筒固定板上,推杆筒固定板的厚度与基座固定板开设的铣槽宽度相等,推杆筒固定板插接在铣槽内实现推杆筒固定板的定位,推杆筒固定板通过内六角螺钉固定在基座固定板的铣槽中。
[0014]
进一步的,所述第一阶梯轴端部设置有用于固定的法兰盘,第一阶梯轴的法兰盘与基座中间件的侧边的耳部通过内六角螺栓固定连接。
[0015]
进一步的,所述第一推杆和第二推杆分别与静平台总成的两个推杆筒组成推杆机构,推杆机构运动时驱动所述动平台总成的运动。
[0016]
进一步的,所述第四连接件与关节轴承的连接构成转动副。
[0017]
进一步的,所述基座中间件的u型底部较厚,在基座中间件的底部开设有贯穿的通孔以减轻基座中间件的重量。
[0018]
进一步的,所述垫板上表面的左右两侧分别开设有一条铣槽且两条铣槽平行设置,两块立板的下端内嵌在两条铣槽内,两块立板与垫板通过内六角螺栓固定连接。垫板上的两条铣槽用于两块立板的定位,保证两块立板的平行。
[0019]
进一步的,所述第一阶梯轴、第二阶梯轴、第四连接件和关节轴的轴心线始终相较于一点。
[0020]
本发明提出的一种包含恰约束支链的两自由度部分解耦并联机构中,所述第三支链总成为恰约束支链,限制了总平台总成整体的运动自由度,为两个转动自由度;所述第一支链总成中第一推杆的上下往复运动,可使动平台总成始终绕着第一阶梯轴的轴线旋转而不影响第二支链总成中第二推杆的运动;所述第二支链总成中第二推杆的上下往复运动,由于第一支链总成的限制作用可使动平台总成始终绕着第二阶梯轴的轴线旋转;这样的机构不仅结构紧凑,还使得动平台总成3能够具有部分解耦性两个转动自由度。
[0021]
本发明的有益效果在于:
[0022]
1、本发明的动平台总成在空间上具有两个转动自由度,其中一个自由度运动为解耦运动,无需两个驱动单元共同控制,整体机构结构紧凑、刚度大、各向同性好、控制容易,可应用于机器人关节结构、并联加工机床等领域,具有良好的市场前景。
[0023]
2、本发明的第三支链总成为恰约束支链,决定了总平台总成整体的运动自由度,为空间两个转动自由度,相当于传统虎克铰中的十字架,并且该链于基座中间件相连,增大了机构的承载能力。
[0024]
3、本发明的作为驱动单元的两个推杆机构都固定于静平台总成上,即固定在机架上,在实现动平台运动功能的同时降低了各机构支链的运动惯性,并且采用移动副作为驱动关节,增大了机构的负载能力。
[0025]
4、本发明第一支链总成中第一推杆的上下往复运动,由于第三支链总成的限制作用,使得动平台总成始终绕着第一阶梯轴的轴线旋转而与第二支链总成中第二推杆的运动无关,进而实现了机构的部分解耦,其运动学正反解较简单。
附图说明
[0026]
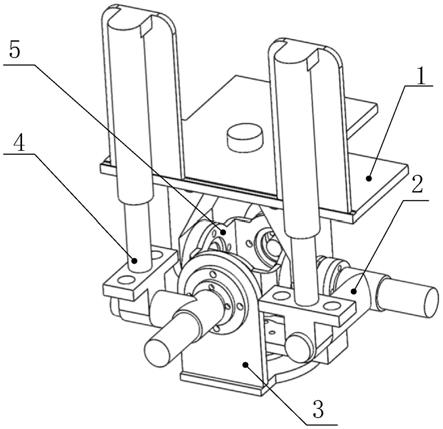
图1是本发明的一种包含恰约束支链的两自由度部分解耦并联机构的整体结构示意图。
[0027]
图2是本发明的静平台总成的结构示意图。
[0028]
图3是本发明的第一支链总成的结构示意图。
[0029]
图4是本发明的第二支链总成的结构示意图。
[0030]
图5是本发明的第三支链总成的结构示意图。
[0031]
图6是本发明的动平台总成的结构示意图。
[0032]
图中,1-静平台总成、2-第二支链总成、3-动平台总成、4-第一支链总成、5-第三支链总成、11-基座固定板、12-推杆筒、13-基座中间件、14-第一阶梯轴、21-第二推杆、22-第二连接件、23-第三连接件、24-第四连接件、31-第五连接件、32-第二阶梯轴、33-立板、34-垫板、35-关节轴承、41-第一推杆、42-第一连接件、51-方形环件、52-圆形轴承座、53-圆形配合轴承。
具体实施方式
[0033]
下面结合附图对本发明作进一步说明:
[0034]
如图1~6所示,一种包含恰约束支链的两自由度部分解耦并联机构,包括静平台总成1、动平台总成3和三条支链总成,三条支链总成分别为第一支链总成4、第二支链总成2和第三支链总成5,所述静平台总成1和动平台总成3通过三条支链总成连接。静平台总成1
的作为整个机构的固定部分是连接在机架上的,动平台总成3则是作为整个机构的活动部分,可以连接具体的运动部件。
[0035]
所述静平台总成1包括基座固定板11、推杆筒12、基座中间件13和第一阶梯轴14,所述推杆筒12设置有两个,且两个推杆筒12均竖直固定在基座固定板11的一侧,两个推杆筒12的轴心线垂直于基座固定板11设置,所述基座固定板11中部开设有光孔,基座中间件13顶部设置有竖直设置的定位杆,基座中间件13上的定位杆穿过穿过基座固定板11上光孔,基座中间件13通过内六角螺栓固定在所述基座固定板11上;所述基座中间件13整体呈倒u型,基座中间件13的两条侧边的耳部开设有定位孔,两个第一阶梯轴14分别穿过基座中间件13上的两个定位孔且两个第一阶梯轴14固定在基座中间件13上,两个第一阶梯轴14的轴心线与基座固定板11的上表面相平行。
[0036]
所述基座中间件13的u型底部较厚,在基座中间件13的底部开设有贯穿的通孔以减轻基座中间件13的重量。基座中间件13与其顶部的定位杆直接一体成型,定位杆本身呈光轴状,直接插接在基座固定板11的中部开设的光孔内并通过内六角螺栓固定连接。
[0037]
所述基座固定板11整体呈凸型,基座固定板11上靠近推杆筒12的一侧表面上开有一道铣槽,铣槽开设在基座固定板11的长边一侧且与长边平行设置,两根推杆筒12通过铣槽在基座固定板11上定位以保证两根推杆筒12的平行。所述推杆筒12包括推杆筒壁和推杆筒固定板,所述推杆筒壁固定在推杆筒固定板上,推杆筒固定板的厚度与基座固定板11开设的铣槽宽度相等,推杆筒固定板插接在铣槽内实现推杆筒固定板的定位,推杆筒固定板通过内六角螺钉固定在基座固定板11的铣槽中。
[0038]
所述第一阶梯轴14端部设置有用于固定的法兰盘,第一阶梯轴14的法兰盘与基座中间件13的侧边的耳部通过内六角螺栓固定连接。第一阶梯轴14用于连接第三支链总成3。
[0039]
所述动平台总成3包括第五连接件31、第二阶梯轴32、立板33、垫板34和关节轴承35,所述关节轴承35内嵌在所述垫板34的中部,垫板34的左右两侧分别设置有一块竖直设置的立板33,两块立板33平行设置且对称设置在关节轴承35的两侧,两个第二阶梯轴32分别固定在两块立板33的上端,其中一个第二阶梯轴32远离另一个第二阶梯轴32的一侧固定有第五连接件31,所述第五连接件31呈轴状,第五连接件31和两个第二阶梯轴32的轴心线在同一条直线上且第五连接件31和两个第二阶梯轴32的轴心线垂直于立板33设置。
[0040]
所述垫板34上表面的左右两侧分别开设有一条铣槽且两条铣槽平行设置,两块立板33的下端内嵌在两条铣槽内,两块立板33与垫板34通过内六角螺栓固定连接。
[0041]
所述第一支链总成4包括第一推杆41和第一连接件42,所述第一推杆41的上端设置在静平台总成1的一个推杆筒12内,第一推杆41的下端设置有轴套;所述第一连接件42的一端设置有第一连接阶梯轴,第一连接件42的另一端设置有第一连接套筒,第一推杆41下端的轴套与第一连接件42一端的第一连接阶梯轴通过轴承连接,所述动平台总成3的第五连接件31套装在所述第一连接件42另一端的第一连接套筒内。
[0042]
所述第一推杆41和第二推杆21分别与静平台总成1的两个推杆筒12组成推杆机构,推杆机构运动时驱动所述动平台总成3的运动。
[0043]
所述第二支链总成2包括包括第二推杆21、第二连接件22、第三连接件23和第四连接件24,所述第二推杆21的上端设置在静平台总成1的另一个推杆筒12内,第二推杆21的下端设置有轴套;所述第二连接件22的一端设置有第二连接阶梯轴,第二连接件22的另一端
设置有第二连接套筒,第二推杆21下端的轴套与第二连接件22一端的第二连接阶梯轴通过轴承连接,所述第三连接件23套装在第二连接件22另一端的第二连接套筒内;第三连接件23的一端固定连接在l型的第四连接件24的一侧侧边的端部,第四连接件24的另一条侧边的端部与动平台总成3的关节轴承35固定连接。
[0044]
所述第三支链总成5包括方形环件51、圆形轴承座52和圆形配合轴承53,方形环件51的剖面呈正方形,方形环件51的四个侧面的中部均固定有一个圆形轴承座52,每个圆形轴承座52内部设置有一个圆形配合轴承53;所述静平台总成1的两个第一阶梯轴14与其中两个相对设置的圆形配合轴承53配合连接;所述动平台总成3的两个第二阶梯轴32与另外两个相对设置圆形配合轴承53配合连接。
[0045]
所述第一阶梯轴14、第二阶梯轴32、第四连接件24和关节轴的轴心线始终相较于一点。
[0046]
第一推杆41运动时,第一连接件42与第一推杆41下端保持同样的速度向下运动,进而带动动平台总成3和第三运动支链5组成的整体绕着第一阶梯轴14的轴线转动;第二推杆21运动时,带动第二连接件22和第三连接件23组成的整体向下运动,进而带动与第三运动支链5连接的动平台总成3绕着第二阶梯轴32的轴线转动。
[0047]
本发明的一种包含恰约束支链的两自由度部分解耦并联机构中,所述第三支链总成5为恰约束支链,限制了动平台总成3整体的运动自由度,为两个转动自由度;所述第一支链总成4中第一推杆41的上下往复运动,可使动平台总成3始终绕着第一阶梯轴14的轴线旋转而不影响第二支链总成2中第二推杆21的运动;所述第二支链总成2中第二推杆21的上下往复运动,由于第一支链总成4的限制作用可使动平台总成3始终绕着第二阶梯轴32的轴线旋转;这样的机构不仅结构紧凑,还使得动平台总成3能够具有部分解耦性两个转动自由度。
[0048]
上述一种包含恰约束支链的两自由度部分解耦并联机构,结构紧凑,驱动能力强,灵活度较高,可应用于机器人关节结构、运动模拟设备、数控机床、医疗设备等领域。
[0049]
上述实施例只是本发明的较佳实施例,并不是对本发明技术方案的限制,只要是不经过创造性劳动即可在上述实施例的基础上实现的技术方案,均应视为落入本发明专利的权利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1