一种舵机及带有该舵机的机器人关节及机器人的制作方法
1.本发明涉及电传动技术领域,具体是涉及一种舵机及带有该舵机的机器人关节及机器人。
背景技术:
2.舵机是一种位置或角度伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统。目前,在高档遥控玩具,如飞机、潜艇模型及遥控机器人中已经得到了普遍应用。
3.专利号为201520689042.0的中国实用新型专利公开了一种双输出轴机器人专用舵机,舵机外壳安装有电动机,电动机一端设有电动机输出端齿轮;舵机外壳安装有电位器,电位器的一端安装有电位器轴端齿轮;舵机外壳安装有主控芯片;变速齿轮组由轴、从动大齿轮和小齿轮组成,从动大齿轮和小齿轮分别安装在轴上,从动大齿轮与小齿轮之间留有距离,轴通过调心球轴承与舵机外壳相连接;电动机输出端齿轮与从动大齿轮相互啮合。该舵机虽然结构可靠,通过将支撑部分与动力传动部分开设计,并具有双端输出轴,大幅度降低舵机电机的功率。但是,该舵机应用在机器人关节时容易导致两个关节之间的闭合不够彻底。
4.申请号为zl201910117476.6的中国发明专利申请公开了一种并联式舵机余度角度反馈系统,包括舵机本体、轴承端盖、舵机输出轴、转接齿轮和并联齿轮组,轴承端盖安装在所述舵机本体上,从而与所述舵机本体共同形成外壳载体;转接齿轮包括一体成型的转接齿轮本体和两根转接齿轮轴;该并联齿轮组包括两组角度反馈单元,每组角度反馈单元均包括反馈齿轮、销轴和角度传感器,角度传感器通过销轴与所述反馈齿轮本体固定连接;每个反馈齿轮本体分别与转接齿轮啮合。该舵机中的两反馈齿轮上的两角度传感器通过反馈齿轮采用并联布局的方式,虽然可以保证在一个发生故障的情况下切换,采集另一个角度传感器位置反馈,使电动伺服系统无间隙正常工作,大大提高电动伺服系统可靠性。但是,该舵机采用一个舵机输出轴带动两根转接齿轮轴的技术方案容易导致舵机的体积增大,制造成本增加且通用性较差。
5.此外,传统舵机具有单个舵机输出轴。当采用此种结构的舵机应用到_机器人关节时,机器人关节的两个连接件中的任一连接件与该舵机的舵机输出轴固定连接,机器人关节的另一连接件与该舵机的壳体固定连接实现机器人关节的开合。具体是,通过舵机输出轴的转动实现前述两个连接件之间的相对运动。但是,由于此种舵机固有结构的限制,往往导致机器人关节的闭合不彻底,两个关节之间不能完全贴合。为了克服上述现有技术中的缺陷的常规做法是将机器人关节的任一连接件嵌套在另一连接件内从而实现机器人关节的贴合。但是,采用此种做法就导致了舵机的通用性较低,延长了机器人产品的设计周期,增加产品的设计成本和制造成本。
技术实现要素:
6.为克服上述现有技术中的缺陷与不足,本发明提供一种舵机,该舵机输出稳定性
较强、通用性较高且能够解决舵机应用到机器人关机中两个关节闭合不彻底的技术问题。
7.为实现上述目的本发明的技术方案是:一种舵机,包括收容在所述壳体内的电机、pcb电路板、舵机输出轴及齿轮减速机构。所述齿轮减速机构的数量为两组,分别为第一齿轮减速机构和第二齿轮减速机构;所述舵机输出轴的数量为两个,分别为第一舵机输出轴和第二舵机输出轴;所述电机的数量为两个,分别为第一电机和第二电机;所述第一电机的主轴上固定连接有第一马达齿,所述第二电机的主轴上固定连接有第二马达齿;所述第一马达齿通过第一齿轮减速机构与所述第一舵机输出轴上的输入齿轮活动啮合,所述第二马达齿通过所述第二齿轮减速机构与所述第二舵机输出轴上的输入齿轮活动啮合;所述第一电机通过所述第一齿轮减速机构带动所述第一舵机输出轴转动,所述第二电机通过所述第二齿轮减速机构带动所述第二舵机输出轴转动,所述第一舵机输出轴和所述第二舵机输出轴同步或不同步转动。
8.优选的是,所述pcb电路板的数量为两个,分别为第一pcb电路板和第二pcb电路板,所述第一pcb电路板和所述第二pcb电路板镜像对称的设置在所述壳体内;所述第一pcb电路板上电性连接有第一电位器,所述第二pcb电路板上电性连接有第二电位器。
9.在上述任一方案中优选的是,所述第一齿轮减速机构,包括一级齿轮组、二级齿轮组、三级齿轮组和四级齿轮组;所述第一电机的第一马达齿与所述一级齿轮组的上的大齿轮活动啮合,所述一级齿轮组上的小齿轮与所述二级齿轮组上的大齿轮活动啮合;所述二级齿轮组上的小齿轮与所述三级齿轮组上的大齿轮活动啮合,所述三级齿轮组上的小齿轮与所述四级齿轮组上的大齿轮活动啮合;所述四级齿轮组上的小齿轮与所述第一舵机输出轴上的输入齿轮活动啮合。
10.在上述任一方案中优选的是,所述第二齿轮减速机构,包括第一级齿轮组、第二级齿轮组、第三级齿轮组和第四级齿轮组;所述第二电机的第二马达齿与所述第一级齿轮组的上的大齿轮活动啮合,所述第一级齿轮组上的小齿轮与所述第二级齿轮组上的大齿轮活动啮合;所述第二级齿轮组上的小齿轮与所述第三级齿轮组上的大齿轮活动啮合,所述第三级齿轮组上的小齿轮与所述第四级齿轮组上的大齿轮活动啮合;所述第四级齿轮组上的小齿轮与所述第二舵机输出轴上的输入齿轮活动啮合。
11.在上述任一方案中优选的是,所述壳体,包括上壳体、中壳体和下壳体。在所述中壳体上设置有容纳所述第一电机的第一容纳槽和容纳所述第二电机的第二容纳槽。所述第一电机可拆卸地插入在所述第一容纳槽内,所述第二电机可拆卸地插入在所述第二容纳槽内。所述上壳体的顶部设置有至少一个凸出的连接臂。所述连接臂包括但不限于圆柱体结构、正方体结构、长方体结构中的一个或多个。在连接臂的顶部开设有连接孔。所述连接臂的设置便于在所述壳体上挂载外部机器人配件。
12.在上述任一方案中优选的是,所述下壳体上设置有允许所述第一pcb电路板上的第一连接线插座通过的第一开口和允许所述第二pcb电路板上的第二连接线插座通过的第二开口。
13.在上述任一方案中优选的是,所述一级齿轮组通过第一连接轴可转动地安装在所述壳体内。所述第一连接轴的一端可转动地插入在所述中壳体上的第一凹槽内,另一端可转动地插入在所述上壳体的第二凹槽内。所述二级齿轮组通过第二连接轴可转动地安装在所述壳体内。所述第二连接轴的一端可转动地插入在所述中壳体上的第三凹槽内,另一端
可转动地插入在所述上壳体的第四凹槽内。所述三级齿轮组通过第三连接轴可转动地安装在所述壳体内。所述第三连接轴的一端可转动地插入在所述中壳体上的第五凹槽内,另一端可转动地插入在所述上壳体的第六凹槽内。所述四级齿轮组通过第四连接轴可转动地安装在所述壳体内;所述第四连接轴的一端可转动地插入在所述中壳体上的第七凹槽内,另一端可转动地插入在所述上壳体的第八凹槽内。
14.在上述任一方案中优选的是,所述第一级齿轮组通过第五连接轴可转动地安装在所述壳体内。所述第五连接轴的一端可转动地插入在所述中壳体上的第九凹槽内,另一端可转动地插入在所述上壳体的第十凹槽内。所述第二级齿轮组通过第六连接轴可转动地安装在所述壳体内。所述第六连接轴的一端可转动地插入在所述中壳体上的第十一凹槽内,另一端可转动地插入在所述上壳体的第十二凹槽内。所述第三级齿轮组通过第七连接轴可转动地安装在所述壳体内;所述第七连接轴的一端可转动地插入在所述中壳体上的第十三凹槽内,另一端可转动地插入在所述上壳体的第十四凹槽内。所述第四级齿轮组通过第八连接轴可转动地安装在所述壳体内;所述第八连接轴的一端可转动地插入在所述中壳体上的第十五凹槽内,另一端可转动地插入在所述上壳体的第十六凹槽内。
15.本发明的第二个目的在于提供一种机器人关节,该机器人关节采用本发明中的舵机。
16.本发明的第三个目的在于提供一种机器人,该机器人采用本发明中的机器人关节。
17.与现有技术相比本发明的优点在于,该舵机的输出稳定性较高、通用性较强且具有两个舵机输出轴。两个舵机输出轴可同步进行顺时针或逆时针转动。此外,任一个舵机输出轴可进行顺指针转动,另一个舵机输出轴可进行逆时针转动。或者是,任一舵机输出轴进行逆时针转动,另一舵机输出轴顺时针转动。该舵机能够满足满足不同的应用场景,当应用到机器人身上能够满足关节的不同活动需求。
附图说明
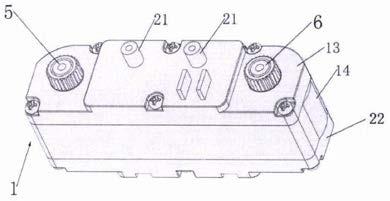
18.图1为按照本发明的舵机一优选实施例的立体结构示意图。
19.图2为按照本发明的舵机图1所示实施例的主视结构示意图。
20.图3为按照本发明的舵机图1所示实施例的俯视结构示意图。
21.图4为按照本发明的舵机图1所示实施例的仰视结构示意图。
22.图5为按照本发明的舵机图1所示实施例的立体装配图。
23.图6为按照本发明的舵机图5所示实施例中第一齿轮减速机构的立体结构示意图。
24.图7为按照本发明的舵机图5所示实施例中第二齿轮减速机构的立体结构示意图。
25.图8为按照本发明的舵机图1所示实施例中的中壳体的立体结构示意图。
26.图9为按照本发明的舵机图1所示实施例中的中壳体的主视结构示意图。
27.图10为按照本发明的舵机图1所示实施例中的中壳体的俯视结构示意图。
28.图11为按照本发明的舵机图1所示实施例中的中壳体的仰视结构示意图。
29.图12为按照本发明的舵机图1所示实施例中的上壳体的仰视结构示意图。
30.图13为按照本发明的舵机图1所示实施例中的下壳体的俯视结构示意图。
具体实施方式
31.下面结合附图对本发明的优选实施例作进一步阐述说明。
32.在本发明的描述中需要理解的是,术语“上部”、“下部部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量,由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
33.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
34.实施例1:
35.如图1-13所示公开了一种舵机。该舵机包括收容在壳体1内的电机、pcb电路板、舵机输出轴及齿轮减速机构。在本实施例中,所述齿轮减速机构的数量为两组,分别为第一齿轮减速机构3和第二齿轮减速机构4。第一齿轮减速机构3和第二齿轮减速机构4均同时装配在壳体1内。壳体1,包括上壳体13、中壳体14和下壳体22。在本实施例中,在上壳体13的顶部设置有至少一个凸出的连接臂21。连接臂21为圆柱形凸台。在连接臂21上开设有连接孔。连接臂21的设置便于在壳体1上外接机器人配件。需要说明的是,连接臂21可以任意设置在上壳体13、中壳体14和下壳体22中的一个或多个。另外,连接臂21可以是正方体结构、长方体结构中的一个或多个。所述pcb电路板的数量为两个,分别为第一pcb电路板9和第二pcb电路板10。第一pcb电路板9和第二pcb电路板10镜像对称的设置在壳体1内。具体是,第一pcb电路板9和第二pcb电路板10同时设置在中壳体14的安装槽内。第一pcb电路板9上电性连接有第一电位器11,第二pcb电路板10上电性连接有第二电位器12。下壳体22上设置有允许第一pcb电路板9上的第一连接线插座17通过的第一开口19和允许第二pcb电路板10上的第二连接线插座18通过的第二开口20。
36.所述舵机输出轴的数量为两个,分别为第一舵机输出轴5和第二舵机输出轴6。所述电机的数量为两个,分别为第一电机2和第二电机2.1。在中壳体14上设置有容纳第一电机2的第一容纳槽16和容纳第二电机2.1的第二容纳槽15第一电机2可拆卸地插入在第一容纳槽16内,第二电机2.1可拆卸地插入在第二容纳槽15内。在第一舵机输出轴的5的底部可拆卸地插入有第一连轴器57,在第二舵机输出轴的底部可拆卸地插入有第二连轴器58。第一连轴器57的一端固定插入在第一舵机输出轴5底部的连接槽内,另一端固定插入在第一电位器11的凹槽内。第二连轴器58的一端固定插入在第二舵机输出轴6的底部连接槽内,另一端固定插入在第二电位器12的凹槽内。在第一舵机输出轴5的上部和下部、第二舵机输出轴6的上部和下部均套装有轴套。第一电机2的主轴上固定套装有第一马达齿7。第二电机2.1的主轴上固定套装有第二马达齿8。第一马达齿7通过第一齿轮减速机构3与第一舵机输出轴5上的输入齿轮活动啮合。第二马达齿8通过第二齿轮减速机构4与第二舵机输出轴6上的输入齿轮活动啮合。第一电机2通过第一齿轮减速机构3带动第一舵机输出轴5转动,第二
电机2.1通过第二齿轮减速机构4带动第二舵机输出轴6转动。第一舵机输出轴5和第二舵机输出轴6同步或不同步转动。
37.第一齿轮减速机构3,包括一级齿轮组3.1、二级齿轮组3.2、三级齿轮组3.3和四级齿轮组3.4。第一电机2的第一马达齿7与一级齿轮组3.1的上的大齿轮活动啮合,一级齿轮组3.1上的小齿轮与二级齿轮组3.2上的大齿轮活动啮合。二级齿轮组3.2上的小齿轮与三级齿轮组3.3上的大齿轮活动啮合,三级齿轮组3.3上的小齿轮与四级齿轮组3.4上的大齿轮活动啮合。四级齿轮组3.4上的小齿轮与第一舵机输出轴5上的输入齿轮活动啮合。一级齿轮组3.1通过第一连接轴31可转动地安装在壳体1内。具体是,第一连接轴31的一端可转动地插入在中壳体14上的第一凹槽41内,另一端可转动地插入在上壳体13的第二凹槽42内。二级齿轮组3.2通过第二连接轴32可转动地安装在1壳体内。具体是,第二连接轴32的一端可转动地插入在中壳体14上的第三凹槽43内,另一端可转动地插入在上壳体13的第四凹槽44内。三级齿轮组3.3通过第三连接轴33可转动地安装在壳体1内。具体是,第三连接轴33的一端可转动地插入在中壳体14上的第五凹槽45内,另一端可转动地插入在上壳体13的第六凹槽46内。四级齿轮组3.4通过第四连接轴34可转动地安装在壳体1内。具体是,第四连接轴34的一端可转动地插入在中壳体14上的第七凹槽47内,另一端可转动地插入在上壳体13的第八凹槽48内。
38.第二齿轮减速机构4,包括第一级齿轮组4.1、第二级齿轮组4.2、第三级齿轮组4.3和第四级齿轮组4.4;第二电机2.1的第二马达齿8与第一级齿轮组4.1的上的大齿轮活动啮合,第一级齿轮组4.1上的小齿轮与第二级齿轮组4.2上的大齿轮活动啮合。第二级齿轮组4.2上的小齿轮与第三级齿轮组4.3上的大齿轮活动啮合,第三级齿轮组4.3上的小齿轮与第四级齿轮组4.4上的大齿轮活动啮合。第四级齿轮组4.4上的小齿轮与第二舵机输出轴6上的输入齿轮活动啮合。
39.第一级齿轮组4.1通过第五连接轴35可转动地安装在壳体1内。具体是,第五连接轴35的一端可转动地插入在中壳体14上的第九凹槽49内,另一端可转动地插入在上壳体13的第十凹槽50内。第二级齿轮组4.2通过第六连接轴36可转动地安装在壳体1内。具体是,第六连接轴36的一端可转动地插入在中壳体14上的第十一凹槽51内,另一端可转动地插入在上壳体13的第十二凹槽52内。第三级齿轮组4.3通过第七连接轴37可转动地安装在壳体1内。具体是,第七连接轴37的一端可转动地插入在中壳体14上的第十三凹槽53内,另一端可转动地插入在上壳体13的第十四凹槽54内。第四级齿轮组4.4通过第八连接轴38可转动地安装在壳体1内。具体是,第八连接轴38的一端可转动地插入在中壳体14上的第十五凹槽55内,另一端可转动地插入在上壳体13的第十六凹槽56内。
40.实施例2:
41.如图1-13所示,一种机器人关节,该关节采用上述实施例1中的舵机。
42.实施例3:
43.如图1-13所示,一种机器人,该机器人具有实施例2中的所述机器人关节。
44.以上所述仅是本发明的优选实施例,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
45.阅读了本说明书后,本领域技术人员不难看出,本发明由现有技术的结合构成,这
些构成本发明的各部分的现有技术有些在此给予了详细描述,有些则出于说明书简明考虑并未事无巨细地赘述,但本领域技术人员阅读了说明书后便知所云。而且本领域技术人员也不难看出,为构成本发明而对这些现有技术的结合是饱含大量创造性劳动,是发明人多年理论分析和大量实验的结晶。本领域技术人员同样可以从说明书中看出,这里所披露的每个技术方案以及各个特征的任意组合都属于本发明的一部分。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1