基于光电感应的工业机器人工具坐标系标定辅具及方法与流程
[0001]
本发明涉及工业机器人坐标标定技术领域,具体地说,是一种基于光电感应的工业机器人工具坐标系标定辅具及方法。
背景技术:
[0002]
工业机器人工具坐标系标定一般采用含有圆锥尖端的标定辅具,通过调整工业机器人机械臂姿态让末端工具的尖端点(例如,焊接机器人焊枪的枪头)与上述标定辅具的尖端点共点(简称针尖对针尖姿态),并记录此时的机器人坐标。整个标定过程需要调整并记录5次这种针尖对针尖的姿态坐标。标定精度主要取决于共点姿态判定,即共点程度,而目前主要依靠人眼观察来判定,存在视角偏差。
[0003]
操作者通过机器人示教器进行姿态调整时有观察方向局限性,例如,在某一方位观察判定了共点接触,而在另一方向观察则可能还相差很远。实际操作中都会有两个人站在不同方位观察或一个人走动观察,考虑到机器人的危险性以及针尖对针尖的小尺度精密对准要求,对于工业现场可能有不可靠近的限制。造成了机器人示教操作经常会出现动作过大而损坏标定辅具的情况。另一方面,机器人在使用中经常需要更换工具、或是受到碰撞而改变工具姿态,上述复杂的标定过程会极大影响工作效率。
技术实现要素:
[0004]
本发明的目的在于针对现有工具坐标系标定技术中存在操作困难、标定精度低的问题,提供一种基于光电感应的工业机器人工具坐标系标定辅具,具体技术方案如下:一种基于光电感应的工业机器人工具坐标系标定辅具,包括吸附胶盘底座、中空圆柱管、mcu微控制单元、信号a/d转换及调理放大模块、语音喇叭、4个光电感应二极管、光源(激光发射头或led光源)、镜头。
[0005]
吸附胶盘底座利用负压吸附原理将该辅具固定在工作台表面。光源与4个光电感应二极管呈对称布置,即光源布置在中央、光电感应二极管布置在其周围4个象限。在光源和4个光电感应二极管前端布置有螺纹连接的微型镜头,通过旋转螺纹可以实现调聚焦功能,越聚焦则光束越细对应的探测距离越远。光源和光电感应二极管的导线经过中空圆柱管到达信号a/d转换及调理放大模块和mcu微控制单元(小型单片机)。当工业机器人工具尖端点移动到该辅具前端一定距离时,光源发射的光照射到机器人工具尖端点形成光斑,布置在4个象限的光电感应二极管则对该光斑进行探测。光电感应二极管感受的光强经过a/d转换及调理放大模块输出为数值量进入mcu微控制单元。
[0006]
标定使用时,微调机器人机械臂姿态使机器人工具尖端从标定辅具前方经过,当4个光电感应二极管感光量值相等且同时达到设定的阈值时则mcu控制喇叭发出第1类提示音,则临界发声点即表示机器人工具前端点处于标定辅具的正前方一定距离l处,机器人示教器记录第1个姿态。与光电接近开关类似,感受光强值与探头到待测光斑的距离是对应相关的。
[0007]
再次微调机器人机械臂姿态使机器人工具尖端从标定辅具前方经过,当两个光电感应二极管感光量值相等且都等于设定的阈值则发出第2类提示音,表示机器人工具尖端相对4象限光电感应二极管的投影处于4象限的坐标轴或半象限位置。进一步调整机器人工具尖端姿态,当另外两个光电感应二极管中的其中一个感光量由大到小,当不再变化的临界状态时发出第3类提示音,表示机器人工具尖端也处于标定辅具的正前方一定距离l处。变换不同姿态重复以上过程即可记录另外4个姿态,完成标定所需的5点。
[0008]
本发明的有益效果:本发明的采用光电检测和标定姿态声音提示的方式极大地提高了标定过程操作的便捷性和准确度。相比于传统标定方法,本发明装置更符合实际使用的需要。针对常用的多点标定法难以实现可靠标定问题,设计了一种工业机器人工具坐标系标定装置,其原理简单、可操作性强、自动化程度高且易于实现。
附图说明
[0009]
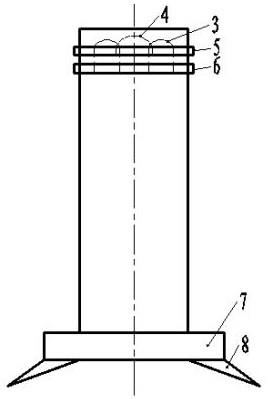
图1是本发明的结构示意图。
[0010]
图2是图1的俯视图。
[0011]
图中,1-光电感应二极管,2-光源,3-光电感应二极管微透镜,4-光源微透镜,5-光源调焦凸手轮,6-光电感应二极管调焦凸手轮,7-pcb板安置腔,8-吸附胶盘底座。
具体实施方式
[0012]
为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
[0013]
实施例:如图1和图2所示,四个光电感应二极管1以光源2为中心对称布置在其周围,在每个光电感应二极管的前端焦距处均有光电感应二极管微透镜3,在光源的前端焦距处布置有光源微透镜4;通过旋转光源调焦凸手轮5可以调节光源到透镜的距离从而实现光束聚焦程度,通过旋转光电感应二极管调焦凸手轮6可以调节光电感应二极管到透镜的距离从而实现对焦。光电感应二极管感受的光强经过a/d转换及调理放大模块输出为数值量进入mcu微控制单元。所述a/d转换及调理放大模块、mcu微控制单元及其附属的语言喇叭均集成在pcb板卡上,并安置在pcb板安置腔7中。底部的吸附胶盘底座利用负压吸附原理将辅具固定在台面上。
[0014]
标定使用时,微调机器人机械臂姿态使机器人工具尖端从标定辅具前方经过,当4个光电感应二极管感光量值相等且同时达到设定的阈值时则mcu控制喇叭发出第1类提示音,则临界发声点即表示机器人工具前端点处于标定辅具的正前方一定距离l处,机器人示教器记录第1个姿态。与光电接近开关类似,感受光强值与探头到待测光斑的距离是对应相关的。
[0015]
再次微调机器人机械臂姿态使机器人工具尖端从标定辅具前方经过,当两个光电感应二极管感光量值相等且都等于设定的阈值则发出第2类提示音,表示机器人工具尖端相对4象限光电感应二极管的投影处于4象限的坐标轴或半象限位置。进一步调整机器人工具尖端姿态,当另外两个光电感应二极管中的其中一个感光量由大到小,当不再变化的临界状态时发出第3类提示音,表示机器人工具尖端也处于标定辅具的正前方一定距离l处。变换不同姿态重复以上过程即可记录另外4个姿态,完成标定所需的5点。
[0016]
以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1