一种管片模具清理装置的制作方法
1.本实用新型属于模具清理设备技术领域,尤其是涉及一种管片模具清理装置。
背景技术:
2.现在许多水泥制品生产现场都是人工清理如图1所示的模具表面,这种工作劳动强度很大,平时虽然带着口罩,可在清理模具时,扬起的灰尘都围绕在清理人员的周围,尤其在室内顺着光线看过去更加明显。这种工作环境对员工的身体健康会造成一定的伤害。特别是矽肺方面的伤害。虽然每半年对员工进行体检一次,但是体检只是起着筛查作用,并不能彻底解决“环境污染”问题。
技术实现要素:
3.本实用新型的目的是提供一种管片模具清理装置,可以减轻员工的劳动强度,提升劳动效率,尤其适合用在水泥制品盾构预制管片制造行业中使用。
4.本实用新型的技术方案是:一种管片模具清理装置,包括清理机构、机器人和刷件,所述的清理机构包括除尘风机、除尘器、除尘风管和风管吊臂,所述的除尘器设在除尘器底座上,所述的除尘器的进风口通过第一管与除尘风机的出风口相连,所述的除尘风机的进风口通过第二管与除尘风管的一端相连,所述的除尘器底座上设有风管吊臂,所述的除尘风管固定在风管吊臂上;
5.所述的机器人设在机器人底座上,所述的机器人旋转臂通过风管抱箍与除尘风管的另一端相连,所述的除尘风管的另一端设在模具轴线中点上侧,在机器人旋转臂端部设有摄像头,该摄像头的采集数据模块、除尘器、除尘风机分别与机器人的主控模块相连,所述的机器人旋转臂端部设有转动电机,该转动电机与机器人的主控模块电连接,所述的转动电机的输出轴穿过连接法兰,且与芯轴键连接,所述的连接法兰固定在转动电机上,所述的芯轴外侧环周设有长圆形毛刷。
6.进一步,所述的风管吊臂下侧设有固定套,所述的除尘风管穿过固定套。
7.进一步,所述的机器人的型号为qjr10
‑
2。
8.进一步,所述的转动电机的输出轴与连接法兰之间设有轴承,
9.进一步,所述的长圆形毛刷的毛刷丝采用尼龙材料,长度150mm,毛刷直径380mm。
10.进一步,机器人旋转臂端部通过安装座设有摄像头。
11.进一步,所述的摄像头设在除尘风管的内侧。
12.本实用新型具有的优点和积极效果是:由于采用上述技术方案,省去人工清理管片模具,使员工有一个安全、清洁、舒适的工作环境,实现了自动进行对其进行清理,减轻了员工的劳动强度,提高了生产效率,优化了工作环境,保障了员工的身体健康。
附图说明
13.图1是背景技术的模具的结构示意图。
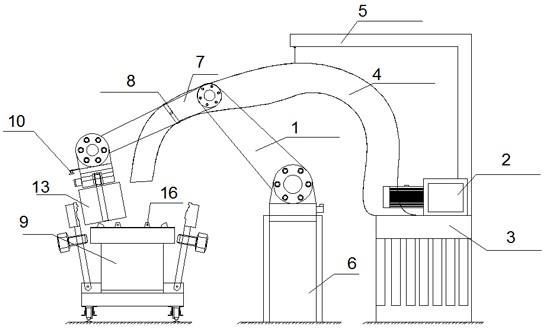
14.图2是本实用新型的结构示意图。
15.图3是刷件的结构示意图。
16.图中:
17.具体实施方式
18.如图1
‑
3所示,本实用新型的技术方案为一种管片模具清理装置,包括清理机构、机器人1和刷件,所述的清理机构包括除尘风机2、除尘器3、除尘风管4和风管吊臂5,所述的除尘器3设在除尘器底座6上,所述的除尘器3的进风口通过第一管与除尘风机2的出风口相连,所述的除尘风机2的进风口通过第二管与除尘风管4的一端相连,所述的除尘器底座6上设有风管吊臂5,所述的除尘风管4固定在风管吊臂5上,
19.所述的机器人1设在机器人底座6上,所述的机器人旋转臂7通过风管抱箍8与除尘风管4的另一端相连,所述的除尘风管4的另一端设在模具9轴线中点的上侧,在机器人旋转臂7端部设有摄像头10,该摄像头10的采集数据模块、除尘器3、除尘风机2分别与机器人1的主控模块相连,所述的机器人旋转臂7端部设有转动电机,该转动电机与机器人1的主控模块电连接,所述的转动电机的输出轴穿过连接法兰11,且与芯轴12键连接,所述的连接法兰11固定在转动电机上,所述的芯轴12外侧环周设有长圆形毛刷13,该装置由机器人1的主控模块来决定除尘风管4的位置、刷件的工作。
20.本实施例中,所述的风管吊臂5下侧设有固定套,所述的除尘风管4穿过固定套。
21.本实施例中,所述的机器人1的型号为qjr10
‑
2。
22.本实施例中,所述的转动电机的输出轴与连接法兰11之间设有轴承。
23.本实施例中,所述的长圆形毛刷13的毛刷丝采用尼龙材料,长度150mm,毛刷直径380mm。
24.本实施例中,机器人旋转臂7端部通过安装座设有摄像头10。
25.本实施例中,所述的摄像头10设在除尘风管4的内侧。
26.本实例的工作过程:
27.生产线开始工作,员工打开机器人1工作开关,使机器人1处于待机状态,机器人1清理工作的起始、结束和生产线流程保持一致,模具9打开起重机吊出产品,空模具自动流转到下一工位;
28.模具9就位后,机器人1会自动旋转90度,到达模具轴线中点,机器人1端部安装的摄像头10对整个模具9进行扫描记忆,机器人1完成扫描后,再回到模具9轴线中点,准备开始工作。机器人1工作前扫描记忆主要因为模具不是一个平面形状,虽然它的宽度、弧度是固定的,但它的弧长是不同的。模具9打开状态时的侧模14、端模15偏转角度也是随机没有
固定值,它会随着开模螺丝人为旋转圈数而产生变化,但是它的总体变化会在一定范围内的。所以清理之前要进行整体扫描,以确定它的具体位置和形状,便于机器人工作时毛刷的姿态调整。
29.机器人1主要有三种清理模式,首先是调整姿态对侧模14、端模15进行清理,清理路线:侧模14
→
端模15
→
侧模14
→
端模15
→
侧模14。侧模14、端模15清理完成后再调整姿态对底模进行清理。清理机构的除尘风管4就采用风管抱箍8固定在机器人1端部,机器人1扫描完成准备工作时,除尘器3会自动打开,随着机器人1一起工作,这样机器人1清理出的灰尘就会被除尘器3吸走,工作环境就会很清洁。模具9底模清理完成后,要再次调整姿态对底模上的锁孔底座16表面进行清理。锁孔底座16高度110mm、形状是梯形,边角是圆角。清理这个部位时,机器人1的移动要放慢速度,一个一个的清理,锁孔底座清理完成,机器人1要回到工作起点,抬高长圆形毛刷13的头部,旋转90度,回到机器人1的起始位置,保持与模具9行走方向保持一致。这样目的是为了腾出模具顶部空间,为下道涂刷脱模剂工序流出空间。
30.以上对本实用新型的一个实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
技术特征:
1.一种管片模具清理装置,其特征在于:包括清理机构、机器人和刷件,所述的清理机构包括除尘风机、除尘器、除尘风管和风管吊臂,所述的除尘器设在除尘器底座上,所述的除尘器的进风口通过第一管与除尘风机的出风口相连,所述的除尘风机的进风口通过第二管与除尘风管的一端相连,所述的除尘器底座上设有风管吊臂,所述的除尘风管固定在风管吊臂上,所述的机器人设在机器人底座上,所述的机器人旋转臂通过风管抱箍与除尘风管的另一端相连,所述的除尘风管的另一端设在模具轴线中点上侧,在机器人旋转臂端部设有摄像头,该摄像头的采集数据模块、除尘器、除尘风机分别与机器人的主控模块相连,所述的机器人旋转臂端部设有转动电机,该转动电机与机器人的主控模块电连接,所述的转动电机的输出轴穿过连接法兰,且与芯轴键连接,所述的连接法兰固定在转动电机上,所述的芯轴外侧环周设有长圆形毛刷。2.根据权利要求1所述的一种管片模具清理装置,其特征在于:所述的风管吊臂下侧设有固定套,所述的除尘风管穿过固定套。3.根据权利要求1所述的一种管片模具清理装置,其特征在于:所述的机器人的型号为qjr10
‑
2。4.根据权利要求1所述的一种管片模具清理装置,其特征在于:所述的转动电机的输出轴与连接法兰之间设有轴承。5.根据权利要求1所述的一种管片模具清理装置,其特征在于:所述的长圆形毛刷的毛刷丝采用尼龙材料,长度150mm,毛刷直径380mm。6.根据权利要求1所述的一种管片模具清理装置,其特征在于:机器人旋转臂端部通过安装座设有摄像头。
技术总结
本实用新型提供一种管片模具清理装置,包括清理机构、机器人和刷件,所述的清理机构包括除尘风机、除尘器、除尘风管和风管吊臂,所述的机器人旋转臂通过风管抱箍与除尘风管的另一端相连,在机器人旋转臂端部设有摄像头,该摄像头的采集数据模块、除尘器、除尘风机分别与机器人的主控模块相连,所述的机器人旋转臂端部设有转动电机,该转动电机与机器人的主控模块电连接,所述的转动电机的输出轴穿过连接法兰,且与芯轴键连接。本实用新型的有益效果是:省去人工清理管片模具,使员工有一个安全、清洁、舒适的工作环境,实现了自动进行对其进行清理,减轻了员工的劳动强度,提高了生产效率,优化了工作环境,保障了员工的身体健康。保障了员工的身体健康。保障了员工的身体健康。
技术研发人员:王庭根 李臻臻 于谦
受保护的技术使用者:浙江省建材集团建筑产业化有限公司
技术研发日:2020.12.02
技术公布日:2021/11/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1