一种连接产品和机器人的装配末端结构的制作方法
1.本申请涉及飞机产品机器人自动化装配领域,特别是连接产品和机器人的装配末端结构。
背景技术:
2.机器人自动化装配技术最先使用于汽车自动化生产线装配,但是飞机产品完全由机器人自动化装配尚无应用案例,主要是因为汽车产品装配和飞机产品装配要求存在巨大差异。
3.通常汽车产品装配定位精度大于2mm,机器人设备末端采用吸盘或者抓手等柔性结构能够满足产品的装配精度,同时,汽车产品批量大,零件数量相对较少,装配时每台机器人所需要装配的产品对象较单一,机器人设备末端也可设计专用的夹具结构。
4.飞机产品装配定位精度小于1mm,关键重要零件甚至需要达到0.1mm,机器人设备末端需要采用带有精确定位功能的结构,同时,飞机产品批量小,单架机零件数量多,装配时每台机器人需要完成多个产品的定位,机器人设备末端需要具备通用性。
5.此外,飞机产品装配时,需要考虑产品在装配温度变化时的膨胀问题,这就导致飞机产品装配实际是一种确定而非固定位置装配,机器人自动化装配过程需要在测量系统和控制系统的协助下对装配位置进行调整,机器人设备末端需要带有激光测量点。
6.目前没有能够满足机器人自动化装配流程的末端结构,需要设计一款易于实现自动化控制,且无需人工操作和干预的末端结构。
技术实现要素:
7.为了解决上述问题,本申请提供了一种连接产品和机器人的装配末端结构,该末端结构填补飞机产品机器人自动化装配领域末端结构空白。
8.一种连接产品和机器人的装配末端结构,含有吸附定位末端和产品连接端,其特征在于所述的吸附定位端含有法兰盘、转接柱和定位面板,法兰盘和定位面板分别连接在转接柱的两端,所述的法兰盘用于与机器人的悬臂连接,定位面板的表面是凹形吸附腔,在凹形吸附腔的中心设有凸出的导向柱,在凹形吸附腔上均布多个凸锥定位键,在凹形吸附腔上还设有一个通气嘴,该通气嘴通过一个柔性管与负压管路连通,所述的产品连接端与吸附定位末端密封匹配对接,产品连接端是一个板状结构,产品连接端的下侧与产品固定连接,产品连接端的上侧为平面结构,在产品连接端的上侧设有导向约束套和多个凹锥定位键,该导向约束套与定位面板上的导向柱匹配,凹锥定位键与定位面板上的凸锥定位键匹配。
9.为了满足激光测量引导系统的测量需要,在吸附定位末端的转接柱上还设有激光跟踪探测器。
10.本申请的有益效果在于:针对飞机产品机器人自动化装配特点和装配流程需求,设计结构紧凑的吸附定位末端和产品连接端,采用多点式杯锥配合精准定位,采用吸盘吸
附拉紧,其功能易于实现机器人控制操作,并带有激光机械跟踪控制探测器,用于激光测量引导系统的测量。其标准化程度高,易于加工和组装,结构可参数化设计,通用性强,能在飞机产品机器人自动化装配领域推广使用。
11.以下结合实施例附图对本申请做进一步详细说明。
附图说明
12.图1为机器人设备、吸附定位末端和产品连接端示意图
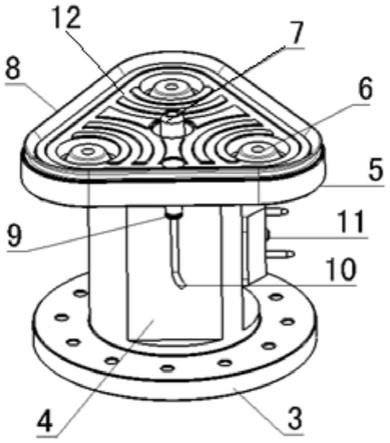
13.图2为吸附定位末端结构示意图。
14.图3为产品连接端结构示意图。
15.图4为吸附定位末端爆炸结构示意图
16.图中编号说明:1吸附定位末端、2产品连接端、3法兰盘、4转接柱、5定位面板、6凸锥定位键、7导向柱、8橡胶密封圈、9通气嘴、10柔性管、11激光跟踪探测器、12吸附腔、13凹锥定位键、14导向约束套、15机器人设备。
具体实施方式
17.具体实施方式,参见附图,本申请的连接产品和机器人的装配末端结构,含有吸附定位末端1和产品连接端2,所述的吸附定位端1含有法兰盘3、转接柱4和定位面板5,法兰盘3和定位面板5分别连接在转接柱4的两端,所述的法兰盘3用于与机器人设备15的悬臂连接,定位面板5的表面是凹形吸附腔12,在凹形吸附腔12的中心设有凸出的导向柱7,在凹形吸附腔12上均布多个凸锥定位键6,在凹形吸附腔上还设有一个通气嘴9,该通气嘴9通过一个柔性管10与负压管路连通,所述的产品连接端2与吸附定位末端1密封匹配对接,产品连接端2是一个板状结构,产品连接端的下侧与产品固定连接,图中未示出,产品连接端的上侧为平面结构,在产品连接端的上侧设有导向约束套14和多个凹锥定位键13,该导向约束套14与定位面板上的导向柱7匹配对应,凹锥定位键14与定位面板上的凸锥定位键6匹配对应。
18.为了满足激光测量引导系统的测量需要,在吸附定位末端的转接柱4上还设有激光跟踪探测器11,当然该激光跟踪探测器11还可以设置在吸附定位末端的法兰盘或定位板的外侧。
19.实施例中,所述的定位面板5是一个正三角形吸附腔12,三角形的顶端为圆角,在吸附腔12的三个圆角位置处分别设有一个凸锥定位键6,所述的产品连接端2为对应的正三角形板状结构,三角形的顶端同样为圆角,在三角形板状结构上侧表面中心设有一个导向约束套14,围绕导向约束套14,设有三个与凸锥定位键6匹配的凹锥定位键13。
20.为了保证吸附定位末端1和产品连接端2之间的密封在定位面板吸附腔的周边设有环形橡胶密封圈8。
21.使用时,将产品连接端的下侧通过紧固件与产品固定连接,将吸附定位末端1的法兰盘与机器人设备的悬臂端固定连接,机器人悬臂带动吸附定位末端1主动寻找产品连接端,定位面板5上的导向柱7与产品连接端的导向约束套14对接,定位面板5上的凸锥定位键6与产品连接端的凹锥定位键13对接,再通过负压管路和通气嘴9将吸附腔抽真空,使吸附定位末端1和产品连接端2之间吸附拉紧,机器人设备通过该末端结构实现对产品的吸附固
定和移动功能。
技术特征:
1.一种连接产品和机器人的装配末端结构,含有吸附定位末端和产品连接端,其特征在于所述的吸附定位端含有法兰盘、转接柱和定位面板,法兰盘和定位面板分别连接在转接柱的两端,所述的法兰盘用于与机器人的悬臂连接,定位面板的表面是凹形吸附腔,在凹形吸附腔的中心设有凸出的导向柱,在凹形吸附腔的均布多个凸锥定位键,在凹形吸附腔上还设有一个通气嘴,该通气嘴通过一个柔性管与负压管路连通,所述的产品连接端与吸附定位末端密封匹配对接,产品连接端是一个板状结构,产品连接端的下侧与产品固定连接,产品连接端的上侧为平面结构,在产品连接端的上侧设有导向约束套和多个凹锥定位键,该导向约束套与定位面板上的导向柱匹配,凹锥定位键与定位面板上的凸锥定位键匹配。2.如权利要求1所述的连接产品和机器人的装配末端结构,其特征在于,在吸附定位末端的转接柱上还设有激光跟踪探测器。3.如权利要求1或2所述的连接产品和机器人的装配末端结构,其特征在于,所述的定位面板是一个正三角形吸附腔,在吸附腔的三个角位置处分别设有一个凸锥定位键,所述的产品连接端为对应的正三角形板状结构,在三角形板状结构上侧表面设有三个匹配的凹锥定位键。4.如权利要求3所述的连接产品和机器人的装配末端结构,其特征在于,在定位面板吸附腔的周边设有环形橡胶密封圈。
技术总结
一种连接产品和机器人的装配末端结构,含有吸附定位末端和产品连接端,所述的吸附定位端含有法兰盘、转接柱和定位面板,法兰盘和定位面板分别连接在转接柱的两端,定位面板的表面是凹形吸附腔,在凹形吸附腔的中心设有凸出的导向柱和凸锥定位键,在凹形吸附腔上还设有一个通气嘴与负压管路连通,所述的产品连接端与吸附定位末端密封匹配对接,产品连接端的下侧与产品固定连接,产品连接端的上侧为平面结构,在产品连接端的上侧设有导向约束套和多个凹锥定位键,该导向约束套与定位面板上的导向柱匹配,凹锥定位键与定位面板上的凸锥定位键匹配。匹配。匹配。
技术研发人员:郑炜 王伟华 赵成
受保护的技术使用者:西安飞机工业(集团)有限责任公司
技术研发日:2020.12.15
技术公布日:2021/10/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1