一种辐射环境下的侦测作业机器人
1.本发明涉及机器人领域,特别是涉及一种核辐射环境下的侦测作业机器人。
背景技术:
2.核岛发生重大事故时,辐射环境下侦测作业机器人用于搬运/放置小型部件和装备,侦查反应堆厂房内的状况(包括温度、湿度、辐照剂量、易燃易爆剂量),操作反应堆厂房内的手柄、开关、按钮、插销等拟人的动作;及时排除现场可能存在的危险源,代替人完成相关的操作。
3.目前对于核岛发生重大事故的应急设施设备中,还没有功能较为系统、全面的远程操控机器人。对于核岛应急远程设备,往往功能单一,体积庞大,人工远程操作存在较大的复杂性和功能局限性,且在核岛发生重大事故后,大多需要进入高辐射剂量区的应急任务仍需要人工进入参与,对相关操作人员具有一定的安全隐患。
4.有鉴于现有核岛重大事故的应急设施设备存在的不完善问题,本发明提出了一种辐射环境下侦测作业机器人,在发生核岛重大事故时,代替人进入高辐射剂量现场代替人完成故障排除任务、执行危险源头作业等。
5.因此本领域人员致力于研发一种核事故应急用的辐射环境下的侦测作业机器人。
技术实现要素:
6.有鉴于核应急设备现有的缺陷与空白,本发明所要解决的技术问题是提供一种辐射环境下侦测作业机器人,能填补目前核应急设备中的缺陷与空白。
7.为实现上述目的,本发明提供了一种辐射环境下侦测作业机器人,包括履带底盘车体1、车身载体2、机械臂3、工具头自动更换器4、多种专用工具头5、液压支腿6、液压动力系统和辅助图像照明系统等。
8.进一步地,所述履带底盘车体1的两组履带独立驱动,前后设有可伸缩的液压支腿6;所述车身载体2内部安装液压动力系统和控制系统,在车身载体2前后安装有全景摄像头和照明装置,车身载体2可相对履带底盘车体360
°
旋转;所述机械臂3安装在车身载体2上,具有4个独立可控的活动关节;工具头自动更换器4安装在机械臂3末端,用于搭载多种专用工具头5执行各种远程操作任务;所述液压支腿6包括前后两组,安装在履带底盘车体1上,机器人在执行重载任务且履带底盘车体1无需移动时,由液压支腿6支撑机器人。
9.进一步地,所述履带底盘车体1由两组主动链轮7、两组液压马达8、纵梁9、车身转台10、支腿架11、两组行走履带12、履带导向轮13、横梁车身14、多组支重轮15和中央回转接头16组成;所述主动链轮7安装在液压马达8的减速组输出轴上,所述液压马达8安装在横梁车身14上;所述纵梁9安装在横梁车身14的横梁上,在纵梁9中间安装有车身转台10,两端分别都有支腿架11;所述行走履带12包含两组,分布在履带底盘车体1两侧,行走履带12中间设有等间隔的通孔,与主动链轮7啮合,行走履带12中间设有轨道槽,与履带导向轮13、主动链轮7配合定位;所述中央回转接头16安装在纵梁9上,与车身转台10同轴。
10.进一步地,所述车身载体2包括密封式车身外壳17、车身回转马达18、电动液压泵19、液压油箱20、自动卷线盘21、远程测量系统22、传感系统23、云台相机24、液压阀组件25、前视双目相机26和回转底板27组成;所述密封式车身外壳17为全密封设计,机器人内部空间与外部环境完全分隔开前端中部内凹,两侧对称;车身回转马达18安装在密封式车身外壳17上,输出轴设有与车身转台10相啮合的齿轮;电动液压泵19由驱动电机和油泵组成;所述自动卷线盘21安装在密封式车身外壳17尾部,机器人行进时,自动卷线盘21根据机器人行走速度和距离自动收放后端线缆;远程测量系统22、传感系统23、云台相机24安装在车身载体2顶部。
11.进一步地,所述机械臂3主要由第一摇臂28、第一油缸29、第二摇臂30、第二油缸31、第三摇臂32、第三油缸33、第四油缸34、第一末端连杆35和第二末端连杆36组成;第一摇臂28一端通过铰链连接在车身载体2上,第一油缸29一端连接在车身载体2上,另一端连接在第一摇臂28上,第一油缸29控制第一摇臂28的摆动;第二摇臂30和第二油缸31的一端连接在第一摇臂28上,第二油缸31控制第二摇臂30的摆动;第三摇臂32和第三油缸33同理;第四油缸34一端连接第三摇臂32,另一端连接第一末端连杆35,所述第一末端连杆35一端连接在第三摇臂32上,另一端与第二末端连杆36连接。
12.进一步地,所述工具头自动更换器4由机械臂连接架37、密封外罩38、旋转电液滑环39、中空转轴40、工具卡头41、伸缩油缸42、齿圈43和工具回转马达44组成;机械臂连接架37上设有与第三摇臂32、第二末端连杆36末端连接的销孔;旋转电液滑环39由外环和内柱组成,外环静止,输入液压油,内柱旋转,设有多路油路通道;工具卡头41两侧设有工具安装槽,其中一侧为凹槽,另一侧为半槽;伸缩油缸42安装在工具卡头41内,连接来自旋转电液滑环39的油路,控制推杆42a伸缩运动;工具回转马达44与安装在中空转轴40上的齿圈43啮合,控制下方工具卡头41和多种专用工具头5做回转运动。
13.进一步地,所述多种专用工具头5包括多功能抓斗45、液压剪/扩张器46、动力机械手47和切割锯48。每个工具头顶部都有快换安装架45a,与工具卡头41外形适配;所述多功能抓斗45由左右两个半斗组成,两半斗在伸缩油缸作用下实现开合动作;所述液压剪/扩张器46为双向液压缸驱动;所述动力机械手47有多个关节,末端设有抓取物体的机械手;所述切割锯48为液压马达驱动的切割锯。
14.进一步地,所述液压支腿6由左右对称的两组支腿组成,每组支腿包括支腿伸缩油缸49、支腿底座50、支腿本体51、支腿外罩52组成;所述支腿伸缩油缸49一端连接在支腿本体51上,另一端连接在支腿架11上;所述支腿本体51近地端安装支腿底座50,另一端通过铰链连接在支腿架11上;支腿伸缩油缸49安装在支腿本体51内部空间。机器人前后各有一组述液压支腿6。
15.进一步地,在机器人本体上搭载了自动卷线盘21、远程测量系统22、传感系统23和云台相机24,所述自动卷线盘21根据机器人运行速度和方向自动调整收/放线缆速度;所述远程测量系统22包括二维云台系统和激光扫描系统;所述传感系统23包括辐射剂量率测量系统和温度、湿度测量系统;所述云台相机24上设有照明灯。
16.发明的原理在于:一种辐射环境下侦测作业机器人,包括履带底盘车体、车身载体、机械臂、工具头自动更换器、多种专用工具头、液压动力系统和辅助图像照明系统等。其中:
17.履带底盘车体由机器人两侧的行走履带和横梁式车身组成,两组履带均通过独立可控的液压马达驱动,实现机器人正常行进功能;横梁式车身前后设有安装液压支腿的安装架。
18.车身载体是一密封的腔体,内部设有车身回转马达、电动液压泵、液压油箱、液压阀组件,外部设有自动卷线盘、远程测量系统、传感系统、云台相机、前视工作相机和回转底板。电动液压泵将电能转化为液压能,为机器人运作提供动力;通过车身回转马达与横梁式车身上的内齿圈配合,实现车身旋转运动。远程测量系统、传感系统、云台相机、前视工作相机实现机器人所在环境基本辐射剂量、温湿度、基本物理环境实时监测功能。
19.机械臂为一4关节串联式机械臂结构,每一个关节都有对应液压油缸驱动控制。在末端安装有工具头自动更换器,且工具头自动更换器可实现旋转运动,通过末端的工具卡头可快速更换4种作业工具头。
附图说明
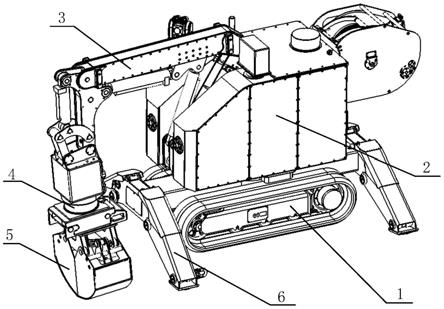
20.图1是本发明一种辐射环境下侦测作业机器人的整体结构示意图,其中,1为履带底盘车体,2为车身载体,3为机械臂,4为工具头自动更换器,5为多种专用工具头,6为液压支腿;
21.图2是本发明一种辐射环境下侦测作业机器人的履带底盘车体结构示意图,其中,1为履带底盘车体,7为主动链轮,8为液压马达,9为纵梁,10为车身转台,11为支腿架,12为行走履带,13为履带导向轮,14为横梁车身,15为支重轮,16为中央回转接头;
22.图3是本发明一种辐射环境下侦测作业机器人的车身载体结构示意图,其中,2为车身载体,17为密封式车身外壳,18为车身回转马达,19为电动液压泵,20为液压油箱,21为自动卷线盘,22为远程测量系统,23为传感系统,24为云台相机,25为液压阀组件,26为前视双目相机,27为回转底板;
23.图4是本发明一种辐射环境下侦测作业机器人的机械臂结构示意图,其中,3为机械臂,28为第一摇臂,29为第一油缸,30为第二摇臂,31为第二油缸,32为第三摇臂,33为第三油缸,34为第四油缸,35为第一末端连杆,36为第二末端连杆;
24.图5是本发明一种辐射环境下侦测作业机器人的工具头自动更换器结构示意图,其中,4为工具头自动更换器,37为机械臂连接架,38为密封外罩,39为旋转电液滑环,40为中空转轴,41为工具卡头,42为伸缩油缸,42a为推杆,43为齿圈,44为工具回转马达;
25.图6是本发明一种辐射环境下侦测作业机器人的多种专用工具头结构示意图,其中,5为多种专用工具头,45为多功能抓斗,45a为快换安装架,46为液压剪/扩张器,47为动力机械手,48为切割锯;
26.图7是本发明一种辐射环境下侦测作业机器人的液压支腿结构示意图,其中,6为液压支腿,49为支腿伸缩油缸,50为支腿底座,51为支腿本体,52为支腿外罩。
具体实施方式
27.下面结合附图和实施例对本发明作进一步说明,需注意的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方式构造和
操作,不能理解为对本发明的限制条件。
28.如图1、图2所示,一种辐射环境下侦测作业机器人,包括履带底盘车体1、车身载体2、机械臂3、工具头自动更换器4、多种专用工具头5、液压支腿6、液压动力系统和辅助图像照明系统等。车身载体2安装在履带底盘车体1的车身转台10上,中间通过中央回转接头16连接动力油路,可相对履带底盘车体1作360
°
旋转。机械臂3通过一组铰链安装在车身载体2上。工具头自动更换器4通过两组铰链安装在机械臂3末端。多种专用工具头5安装在工具头自动更换器4上,包括多功能抓斗45、液压剪/扩张器46、动力机械手47和切割锯48。在机械臂3大负载作业或机器人需要可靠驻车时,由液压支腿6支撑车体,液压支腿6安装在履带底盘车体1前后的支腿架11上。
29.如图2所示,履带底盘车体1由两组主动链轮7、两组液压马达8、纵梁9、车身转台10、支腿架11、两组行走履带12、履带导向轮13、横梁车身14、多组支重轮15和中央回转接头16组成。两组行走履带12分别由独立可控的液压马达8驱动,纵梁9前后设有支腿架11,用于安装液压支腿6,纵梁9中间设有车身转台10和中央回转接头16,用于安装车身载体2及提供油压动力。
30.如图3所示,车身载体2包括密封式车身外壳17、车身回转马达18、电动液压泵19、液压油箱20、自动卷线盘21、远程测量系统22、传感系统23、云台相机24、液压阀组件25、前视工作相机26和回转底板27组成。自动卷线盘在机器人行进时,根据机器人行走速度和距离自动收放后端线缆;远程测量系统22、传感系统23、云台相机24安装在车身载体2的顶部。
31.如图4所示,机械臂3由第一摇臂28、第一油缸29、第二摇臂30、第二油缸31、第三摇臂32、第三油缸33、第四油缸34、第一末端连杆35和第二末端连杆36组成。所有摇臂之间为串联方式,每个摇臂都对应由一组油缸独立控制,在机械臂3末端的第二末端连杆36安装有工具头自动更换器4,在第四油缸34作用下控制工具头自动更换器4俯仰摆动。
32.如图6所示,多种专用工具头5包括多功能抓斗45、液压剪/扩张器46、动力机械手47和切割锯48。每个工具头顶部都有快换安装架45a,并与工具卡头41外形适配,可快速安装在机械臂3上。液压支腿6由左右对称的两组支腿组成,每组支腿包括支腿伸缩油缸49、支腿底座50、支腿本体51、支腿外罩52组成。
33.液压支腿6由左右对称的两组支腿组成,每组支腿包括支腿伸缩油缸49、支腿底座50、支腿本体51、支腿外罩52组成。支腿伸缩油缸49一端连接在支腿本体51上,另一端连接在支腿架11上;支腿伸缩油缸49安装在支腿本体51的内部空间。机器人前后各有一组述液压支腿6。
34.以上详细描述了本发明的具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1