一种吊轨式巡检机器人提升装置的制作方法
1.本发明涉及巡检设备的技术领域,尤其涉及能够对厂房、隧道等区域进行巡检的巡检设备,具体而言,涉及一种吊轨式巡检机器人提升装置。
背景技术:
2.本技术的吊轨式巡检机器人可以用于对厂房、隧道等多种区域或场景。尤其,本技术的吊轨式巡检机器人可以作为管廊机,在需要进行管廊巡检的场景中进行应用。随着城市的发展,城市综合管廊的应用也越来越多,由于综合管廊是个半密闭空间,内部线路众多,人工排查危险性比较大。为了保证检查人员的安全,吊轨式巡检机器人应运而生。现有的吊轨式巡检机器人巡检时通常使用导轨行走装置,该装置使吊轨式巡检机器人利用驱动轮沿着导轨进行移动,便于巡检。例如,吊轨式巡检机器人在巡检时遇到大坡度上坡和下坡时,能够控制驱动轮和吊轨之间的摩擦力来爬坡和防止溜坡。
3.存在的问题是,因轨道高低存在大落差,现有的吊轨式巡检机器人大坡度上坡和大坡度下坡技术局限性较大,已无法满足实际使用中的需求。并且,当吊轨式巡检机器人行走速度较高时,扭矩比较低,爬坡能力差,无法到高处巡检。因此,如何将吊轨式巡检机器人从低处运送到高处进行巡检或成为亟待解决的问题。
技术实现要素:
4.为解决以上技术问题,本发明提供一种吊轨式巡检机器人提升装置,该提升装置有效解决了吊轨式巡检机器人爬坡能力差,从低处向高处巡检行走困难的技术问题,实现吊轨式巡检机器人的提升,具有易灵活变换行径的特点。
5.为了达到上述目的,本发明采用以下技术方案予以解决。
6.本发明实施例提供的一种吊轨式巡检机器人提升装置,包括:可升降轨道,用于固定吊轨式巡检机器人;移动支架,移动支架用于固定可升降轨道;固定支架,移动支架在固定支架上下移动;驱动部,带动移动支架上下移动。
7.与现有技术相比,采用该技术方案所达到的技术效果:可升降轨道能够根据指定的要求完成轨道的上升或下降,将吊轨式巡检机器人固定在可升降轨道上,可升降轨道作为吊轨式巡检机器人提升的载体,从而吊轨式巡检机器人能够跟随可升降轨道实现上移。本发明提供的可升降轨道结构简单可行,其提升操作易于实现。移动支架具有移动灵活性高的优势,通过移动支架,吊轨式巡检机器人在大坡度上坡和大坡度下坡时不会受到限制,将可升降轨道固定于移动支架,由于吊轨式巡检机器人固定在可升降轨道上,因此吊轨式巡检机器人和可升降轨道作为一个整体,因此它们跟随着移动支架移动。移动支架的移动克服了吊轨式巡检机器人爬坡能力差的问题,能够直接将吊轨式巡检机器人从低处运送到高处进行巡检。同时还可以选择不同形状或不同的承载能力的移动支架,使得移动支架移动时的稳定性增强,移动支架的普适性和实操性更强。固定支架是移动支架的基体,移动支架在固定支架上下移动,固定支架对移动支架具有支撑的作用,使得本发明提供的提升装
置结构稳定。驱动部为移动支架的上下移动提供动力,驱动部能够带动移动支架上下移动,当移动支架上下移动时,可升降轨道随着移动支架上下移动,从而达到可升降轨道上的吊轨式巡检机器人从低处到高处进行巡检的目的。本发明提供的吊轨式巡检机器人提升装置易于实现,可操作性高,省时省力,能够轻松对吊轨式巡检机器人进行提升。
8.在本发明的一个实例中,移动支架包括:支架本体和固定装置,其中,固定装置设于支架本体下端,支架本体通过固定装置与可升降轨道连接。
9.与现有技术相比,采用该技术方案所达到的技术效果:固定装置将支架本体与可升降轨道连接成一整体,可升降轨道在支架本体下端,固定装置连接紧固,使得可升降轨道能够跟随支架本体移动,移动过程更加稳定。
10.在本发明的一个实例中,移动支架还包括链条,链条一端与驱动部传动连接。
11.与现有技术相比,采用该技术方案所达到的技术效果:,链条一端与驱动部连接,从而移动支架与驱动部连接,链条具有传动作用,驱动部驱动链条移动,驱动部能够带动移动支架移动,而移动支架下方连接着可升降导轨,使得链条具有传输作用,从而移动支架的移动带动可升降轨道移动,驱动部为移动过程提供动力,使得提升过程省时省力,操作方便,节约人力成本。
12.在本发明的一个实例中,移动支架还包括连接部,支架本体通过连接部和链条连接,其中,链条另一端与连接部固定连接。
13.与现有技术相比,采用该技术方案所达到的技术效果:支架本体通过连接部与链条连接,使得链条能够带动支架本体移动,提高移动效率,链条另一端与连接部固定连接,链条不易脱落,使得移动过程更为稳定。
14.在本发明的一个实例中,驱动部包括传动结构,传动结构包括主动齿轮和从动齿轮一,主动齿轮设于驱动部的输出轴,从动齿轮一与主动齿轮传动连接,从动齿轮一与链条另一端传动连接。
15.与现有技术相比,采用该技术方案所达到的技术效果:主动齿轮与从动齿轮一传动连接,驱动部驱动主动齿轮转动,从而主动齿轮转动能够带动从动齿轮一转动,由于从动齿轮一与链条连接,使得链条跟随从动齿轮一移动,主动齿轮能够一带多运动,使得操作更为便捷高效。
16.在本发明的一个实例中,固定支架包括框架,框架包括传动杆,传动杆上设有从动齿轮二,链条与从动齿轮二啮合传动。
17.与现有技术相比,采用该技术方案所达到的技术效果:固定支架对本发明提供的提升装置起到支撑的作用,提高提升装置的稳定性。传动杆上设有从动齿轮二,传动杆能够将输出轴输出的转向力和动作传递给从动齿轮二,从而从动齿轮转动。链条与从动齿轮二啮合连接,当从动齿轮在传动杆上转动时,链条也跟随着从动齿轮二移动,因此链条具有传输的作用,通过链条的上移,实现吊轨式巡检机器人的上移,效率更高。链条的移动距离可控,实操性高,能够根据吊轨式巡检机器人需要运送到的高度来控制链条的移动距离,将吊轨式巡检机器人运送至指定位置,并且运送过程不耗费人力,省时省力。
18.在本发明的一个实例中,传动杆包括至少两个,传动杆设于框架的上端和下端。
19.与现有技术相比,采用该技术方案所达到的技术效果:传动杆在框架的上端和下端,上下两端通过链条连接,使得吊轨式巡检机器人能够从下端运送到上端,同时传动杆也
具有定位的作用,传动杆上下两端连接所形成的空间,即为吊轨式巡检机器人提升运动的空间,使得吊轨式巡检机器人在框架内部移动,传动杆能够让吊轨式巡检机器人在移动过程中更为省力高效。
20.在本发明的一个实例中,可升降轨道包括本体段和配合段,其中,吊轨式巡检机器人设于本体段。
21.与现有技术相比,采用该技术方案所达到的技术效果:本体段是吊轨式巡检机器人的安装部,配合段是可升降轨道与其他结构的连接部,使得可升降轨道能够固定在固定支架上。当可升降轨道被提升时,吊轨式巡检机器人也跟随着上移,移动至上方时,再进行配合段的连接,使得可升降轨道与其他结构连接成一整体,吊轨式巡检机器人不仅能够实现上移,也能够实现在固定支架内的平移,提高了可升降轨道的普适性,吊轨式巡检机器人的巡检更加全面。
22.在本发明的一个实例中,固定支架还包括固定轨道,固定轨道与可升降轨道通过锁定装置锁定;其中,锁定装置包括第一锁定部和第二锁定部,第一锁定部设于固定轨道,第二锁定部设于可升降轨道,第一锁定部与第二锁定部配合安装,以解锁或锁定固定导轨和可升降轨道。
23.与现有技术相比,采用该技术方案所达到的技术效果:当固定轨道上的第一锁定部与可升降轨道上的第二锁定部配合锁定后,固定轨道就与可升降轨道连接成一条轨道,使得吊轨式巡检机器人从低处运送到高处后能够在轨道上行走进行巡检。当第一锁定部与第二锁定部解锁时,可升降轨道即与固定轨道分离,使得可升降轨道能够运送到其他位置。锁定装置能够适用于吊轨式巡检机器人运送的不同指定要求,使得吊轨式巡检机器人在固定支架内巡检的灵活性更高。
24.在本发明的一个实例中,第一锁定部包括:第一安装座;驱动电机,设于第一安装座;连接组件,连接驱动电机;锁定件。第二锁定部包括:第二安装座;传动组件;阻挡件,设于传动组件一侧,连接传动组件;锁定孔。其中,锁定件通过传动组件驱动阻挡件转动,锁定件和锁定孔能够配合连接。
25.与现有技术相比,采用该技术方案所达到的技术效果:当第一锁定部的驱动电机转动时,连接组件驱动锁定件朝着靠近或远离第二锁定部的方向运动,从而将第一锁定部的锁定件插入或退出第二锁定部的锁定孔,锁定件与锁定孔配合,使得第一锁定部与第二锁定部进行锁定或解锁。锁定件能够通过传动组件驱动阻挡件转动,当锁定件没有插入锁定孔时,阻挡件受重力作用,垂设于可升降导轨,阻碍吊轨式巡检机器人向前运动。通过控制第一锁定部与第二锁定部的锁定或解锁,能够控制可升降轨道与固定轨道连接或不连接,容易控制,且连接方式稳固,提高了吊轨式巡检机器人行走巡检的安全性。
26.采用本发明的技术方案后,能够达到如下技术效果:
27.(1)通过将吊轨式巡检机器人安装于可升降轨道,移动支架固定可升降轨道,驱动部带动移动支架移动,固定支架支撑移动支架运动,使得吊轨式巡检机器人跟随可升降轨道上升,实现吊轨式巡检机器人从低处到高处的提升,提高了吊轨式巡检机器人巡检的工作效率和其提升的稳定性。
附图说明
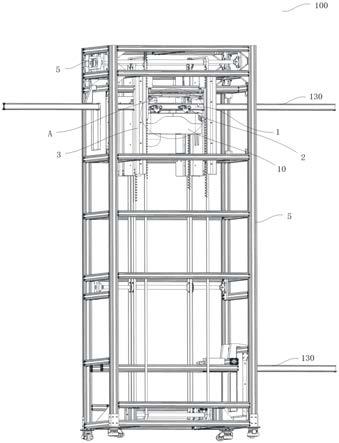
28.图1为本发明实施例提供的一种吊轨式巡检机器人提升装置的结构示意图。
29.图2为图1中a区域的局部放大图
30.图3为图2中滑动装置的结构示意图。
31.图4为本发明实施例提供的滑动装置另一视角的结构示意图。
32.图5为图3中滑动装置的爆炸示意图。
33.图6为本发明实施例提供的滑动装置另一视角的结构示意图。
34.图7为本发明实施例提供的滑动装置的俯视结构示意图。
35.图8为本发明实施例提供的滑动装置在轨道上运行的示意图。
36.图9为图1中移动支架的结构示意图。
37.图10为图1中移动支架另一视角的结构示意图。
38.图11为图1中移动支架的另一视角的结构示意图。
39.图12为本发明实施例提供的一种吊轨式巡检机器人提升装置的侧视结构示意图。
40.图13为本发明实施例提供的一种吊轨式巡检机器人提升装置另一视角的结构示意图。
41.图14为图1中可升降轨道、固定轨道与锁定装置的连接示意图。
42.图15为本发明实施例提供的锁定装置的结构示意图。
43.图16为图15中第一锁定部的结构示意图。
44.图17为图15中第二锁定部的结构示意图。
45.图18为图17中阻挡件和传动组件的连接示意图。
46.图19为图17中第二锁定部另一视角的结构示意图。
47.附图标记说明:
48.100
‑
吊轨式巡检机器人提升装置;1
‑
可升降轨道;10
‑
吊轨式巡检机器人;2
‑
滑动装置;3
‑
可移动支架;4
‑
固定支架;5
‑
驱动部;20
‑
固定部;30
‑
转动臂;40
‑
弹性部;21
‑
连接板;200
‑
固定座本体;210
‑
转动连接部;211
‑
转动连接口;220
‑
动力轮;221
‑
安装孔;31
‑
转动臂本体;32
‑
转动连接端;33
‑
行走端;330
‑
可转动的轮子;331
‑
螺钉;332
‑
螺帽;320
‑
转动连接孔;312
‑
连接轴;310
‑
连接体;311
‑
行走体;201
‑
固定口;301
‑
固定孔;41
‑
弹簧;300
‑
支架本体;400
‑
固定装置;500
‑
链条;600
‑
连接部;601
‑
链条安装件;602
‑
调节板;603
‑
安装孔一;604
‑
安装孔二;605
‑
螺柱;50
‑
传动结构;501
‑
主动齿轮;502
‑
从动齿轮一;503
‑
传动带;410
‑
框架;411
‑
传动杆;412
‑
从动齿轮二;413
‑
带座轴承;110
‑
本体段;120
‑
配合段;130
‑
固定轨道;140
‑
锁定装置;150
‑
第一锁定部;160
‑
第二锁定部;151
‑
第一安装座;152
‑
驱动电机;153
‑
连接组件;154
‑
锁定件;161
‑
第二安装座;162
‑
传动组件;163
‑
阻挡件;164
‑
锁定孔;165
‑
滑动件;166
‑
转动件;167
‑
阻挡件;168
‑
容纳槽。
具体实施方式
49.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
50.实施例一:
51.参见图1,其为本发明实施例提供的一种吊轨式巡检机器人提升装置100,包括:可
升降轨道1,用于固定吊轨式巡检机器人10;移动支架3,用于固定可升降轨道1;固定支架4,移动支架3在固定支架4内上下移动;驱动部5,带动移动支架3上下移动。参见图2,吊轨式巡检机器人10通过滑动装置2安装于可升降轨道1,滑动装置2可以沿着设计的可升降轨道1进行前进、后退、暂停等运动。
52.具体的,当吊轨式巡检机器人10位于低处时,可升降轨道1通过滑动装置2与吊轨式巡检机器人10连接,移动支架3与可升降轨道1连接,驱动部5能够带动移动支架3移动,因此,在向上移动过程中,固定支架4具有支撑作用,吊轨式巡检机器人10、可升降轨道1和移动支架3可作为一个整体同时提升,并且吊轨式巡检机器人10移动的距离可以根据移动支架3移动的距离进行调整。当轨道高低存在大落差时,吊轨式巡检机器人10能够被轻易提升,克服了其大坡度上坡和大坡度下坡困难的问题,省时省力。
53.参见图3和图4,滑动装置2包括固定部20、转动臂30和弹性部40。其中,每两个滑动装置2通过连接板21连接在一起。转动臂30设置有至少两个,分别设置在固定部20的两端,弹性部40设置在转动臂30与固定部20之间。
54.参见图5,固定部20为固定座,包括固定座本体200和位于其两端的转动连接部210,转动连接部210设有两个转动连接口211。固定座本体200设置动力轮220,动力轮220位于固定部20的两端之间。固定座本体200还包括安装孔221,用于安装动力轮220。
55.参见图5和图6,转动臂30包括转动臂本体31、转动连接端32和行走端33,转动连接端32与行走端33分别位于转动臂本体31的两端,并且转动连接端32与转动连接部210配合连接。行走端33设置有可转动的轮子330,可转动的轮子330通过螺钉331和螺帽332安装于行走端33。转动连接端32设置有转动连接孔320。转动连接口211分别位于转动连接孔320的两端,且通过连接轴312进行连接。转动臂本体31包括连接体310和行走体311,连接体310平行于固定部20,行走体311与连接体310所成夹角大于90度。
56.参见图7,固定座本体200设置两个至少两个固定口201,转动臂本体31设有固定孔301,弹性部40的两端分别连接固定口201和固定孔301。弹性部40由弹簧41构成。在本实施例中,一个固定座本体200上设有两个转动臂本体31,且任意选择一个转动臂本体31,在一个转动臂本体31上安装弹簧41,弹簧41具有减震的作用。优选的,在所有的转动臂本体31上都设有弹簧41,能够让减震效果更好,吊轨式巡检机器人行走更加平稳。
57.实施例二:
58.参见图1和图9,移动支架3包括:支架本体300和固定装置400,其中,固定装置400设于支架本体300下端,支架本体300通过固定装置300与可升降轨道1连接。
59.具体的,支架本体300底部的固定装置300为安装板,安装板能够与可升降轨道1配合连接,使得移动支架3与可升降轨道1连接成一整体,移动支架3与可升降轨道1同时移动,移动支架3能够带动可升降轨道1向上移动,从而可升降轨道1上的吊轨式巡检机器人10被提升。
60.实施例三:
61.参见图1和图10,移动支架3还包括链条500,链条500一端与驱动部5传动连接。驱动部500能够驱动链条500沿着驱动方向移动,通过链条500的带动,移动支架3实现移动,从而吊轨式巡检机器人10跟随移动支架3移动。
62.实施例四:
63.参见图11,移动支架3还包括连接部600,支架本体300通过连接部600和链条500连接。连接部600包括链条安装件601和调节板602,链条安装件601设有凹槽,链条500设于凹槽内,调节板602与链条安装件601固定连接,调节板602底部设有安装孔一603,支架本体300设有安装孔二604,安装孔一603和安装孔二604通过螺柱605配合连接。链条500能够在链条安装件601上移动,当链条500移动时,支架本体300跟随着链条500移动方向移动。
64.实施例五:
65.参见图1、图12和图13,驱动部5包括传动结构50,传动结构50包括主动齿轮501和从动齿轮一502,主动齿轮501设于驱动部5的输出轴,从动齿轮一502与主动齿轮501通过传动带503传动连接,当驱动部5驱动主动齿轮501在输出轴上转动时,主动齿轮501带动从动齿轮一502滚动。从动齿轮一502与链条500另一端传动连接,从而从动齿轮一502滚动带动链条500移动。
66.实施例6:
67.参见图1、图10、图12和图13,固定支架4包括框架410,框架410包围提升装置,提升装置各个部件安装于框架410,因而固定支架4具有支撑作用。框架410包括传动杆411,传动杆411安装于框架410,传动杆411上设有从动齿轮二412,每个传动杆411上设有两个从动齿轮二412,链条500与从动齿轮二412啮合传动。主动齿轮501和从动齿轮一502设于框架410一侧,通过主动齿轮501带动从动齿轮一502滚动,从动齿轮一502能够带动传动杆411上的从动齿轮二412滚动。由于链条500与从动齿轮二412啮合,从而链条500跟随从动齿轮二412滚动的方向移动。链条500移动,使得移动支架3跟随着链条500移动,吊轨式巡检机器人10跟随移动支架3移动。
68.实施例7:
69.参见图10和图13,传动杆411包括至少两个,传动杆411设于框架410的上端和下端。
70.具体的,本实施例包括5个传动杆411,上述传动杆结构相同,传动杆411通过带座轴承413安装于框架410,框架410上端对称设有两个传动杆411,框架410下端对称设有两个传动杆411,框架410的上下两端传动杆411之间还设有一个传动杆411,使得传动提升过程更加稳定。传动杆411上设有从动齿轮二412,从动齿轮412上安装有链条500,链条500围绕着传动杆411移动,在传动杆411形成的空间移动,框架410上下两端的传动杆410所形成的空间即为吊轨式巡检机器人上下提升的空间。
71.实施例8:
72.参见图14,可升降轨道1包括本体段110和配合段120,其中,吊轨式巡检机器人10设于本体段110。吊轨式巡检机器人10通过滑动装置2安装于本体段110,吊轨式巡检机器人10能够在可升降轨道1上滑动。配合段120用于可升降轨道1与相邻轨道配合连接,使得吊轨式巡检机器人10能够在可升降轨道1与相邻轨道形成的轨道上滑动,吊轨式巡检机器人10行走更加流畅。
73.实施例9:
74.参见图1、图14和图15,固定支架4包括固定轨道130,固定轨道130与可升降轨道1的配合段120通过锁定装置140锁定;其中,锁定装置140包括第一锁定部150和第二锁定部160,第一锁定部150设于固定轨道130上,第二锁定部150设于可升降轨道1的配合段120上,
第一锁定部150与第二锁定部160配合安装,以解锁或锁定固定导轨130和可升降轨道1。
75.具体的,参见图15、图16和图17,当锁定件154伸入锁定孔164时,第一锁定部150与第二锁定部160配合安装,将固定导轨130和可升降轨道1锁定在一起;当锁定件153退出锁定孔164时,第一锁定部150与第二锁定部160之间的连接断开,固定导轨130和可升降轨道1解锁。
76.实施例10:
77.参见图16,第一锁定部150包括:第一安装座151;驱动电机152,设于第一安装座151;连接组件153,连接驱动电机152;锁定件154。本实施例的连接组件153为曲柄连杆组件,锁定件154设于曲柄连杆组件远离驱动电机152的一侧。
78.参见图16和图17,第二锁定部160包括:第二安装座161;传动组件162;阻挡件163,设于传动组件162一侧,连接传动组件162;锁定孔164。其中,锁定件154通过传动组件162驱动阻挡件163转动,锁定件153和锁定孔164能够配合连接,驱动电机152可驱动锁定件153伸入或退出锁定孔164。
79.具体的,当驱动电机152正转时,驱动电机152驱动曲柄连杆组件顺时针转动,从而通过曲柄连杆组件驱动锁定件154朝着靠近第二锁定部160的方向运动,进而将锁定件154插入第二锁定部160上的锁定孔164内,完成第一锁定部150和第二锁定部160之间的锁定;
80.当驱动电机152反转时,驱动电机152驱动曲柄连杆组件逆时针转动,从而通过曲柄连杆组件驱动锁定件154朝着远离第二锁定部160的方向运动,使得锁定件154从第二锁定部160上的锁定孔164中退出,解除第一锁定部150和第二锁定部160之间的锁定。
81.进一步的,参见图17和图18,传动组件162包括滑动件165和转动件166。其中,滑动件165设置在锁定孔164远离第一锁定部150的一侧;滑动件165上设有齿轮,且与转动件166相啮合;阻挡件167固定连接转动件166。再参见图19,第二安装座161底部开有阻挡件容纳槽168。滑动件165可沿第二安装座161的长度方向做往返运动,从而可带动与其相啮合的转动件166转动,进而带动阻挡件167转动至阻挡件容纳槽168内。
82.举例来说,当锁定件154未插入锁定孔164时,阻挡件168受重力作用,垂设在可升降轨道1的两侧,阻碍吊轨式巡检机器人10无法继续向前行驶;当锁定件154插入锁定孔164时,能够带动锁定件154朝着远离锁定孔164的方向运动,从而带动转动件166顺时针转动,进而带动阻挡件167顺时针转动;当锁定件154完全插入锁定孔164时,阻挡件167转动至阻挡件167容纳槽168内。
83.实施例11:
84.为便于更清楚地理解本实施例,对本实施例的吊轨式巡检机器人提升装置的具体实施过程进行详细描述:
85.当吊轨式巡检机器人要从1层到5层进行巡检时,由于高度差较大,吊轨式巡检机器人无法进行爬坡,因此可利用本实施例提供的吊轨式巡检机器人提升装置,直接将吊轨式巡检机器人从1层提升到5层进行巡检。
86.参见图1至图19,在吊轨式巡检机器人10被提升之前,锁定件153退出锁定孔164时,1层的第一锁定部150与可升降轨道1上的第二锁定部160之间的连接断开,1层的固定导轨130和可升降轨道1解锁。在驱动部5的驱动下,设于传动杆411上的从动齿轮二412滚动,从动齿轮二412与链条500啮合连接,从而链条500移动。链条500与移动支架3配合连接,由
于吊轨式巡检机器人10通过滑动装置2与可升降轨道1连接,移动支架本体300下端与可升降轨道1连接,从而链条500移动带动移动支架3从1层开始向上移动,可升降轨道1和吊轨式巡检机器人10作为一个整体跟随着移动支架3向上移动,吊轨式巡检机器人10移动的方向就是链条500的移动方向。当吊轨式巡检机器人被提升到5层时,5层的第一锁定部150与第二锁定部160配合安装,将固定导轨130和可升降轨道1锁定在一起,从而吊轨式巡检机器人10能够在5层行走进行巡检。其中,固定支架4在吊轨式巡检机器人提升过程中具有支撑作用。
87.虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1