一种基于3D打印的空间站舱内活动人形机器人
一种基于3d打印的空间站舱内活动人形机器人
技术领域
1.本发明涉及机器人领域,尤其是一种在空间站舱人活动人形机器人。
背景技术:
2.近地轨道空间站、月球轨道空间站等大型空间设施对开展太空科学实验、推动人类进入深空具有重要意义。当前,空间站主要以有人照料模式运行,依赖航天员完成各项在轨试验及空间站的日常维护,例如实验过程的长期记录、空间站运行状态监测等。随着在轨任务的日益繁重,利用机器人辅助航天员开展舱内活动、甚至代替航天员进行长期无人值守,是空间站建设的重要发展方向。
3.空间站处于微重力环境,舱内机器人的设计与运动形式同地面机器人显著不同。其设计应充分利用空间微重力环境的特点,降低结构和关节质量;其外形结构应适应人类航天员工作场所,便于利用航天员使用的工具、设备开展空间活动,以及同航天员协同开展工作;其运动形式应能够支持其具备较大的作业范围。已在国际空间站运行的宇航蜜蜂、智子机器人分别采用正方体和球体构型,依靠若干螺旋桨推力器移动,仅能完成拍摄等简单任务。nasa研制的robonaut机器人采用人形结构,固定在舱内基座上或利用把手移动,机器人质量较大、操作范围有限。
技术实现要素:
4.基于上述说明,本发明的目的在于提出一种基于3d打印的空间站舱内活动人形机器人,能适应微重力应用场景,同时也能使用人类航天员使用的工具、设备进行作业,完成辅助拍摄、物资搬运、按钮操作等任务。
5.所采用的技术方案如下:
6.一种基于3d打印的空间站舱内活动人形机器人,包括头部、颈部、躯干、左臂、右臂、左手、右手、腰部、左腿、右腿、控制系统。
7.左臂设计六个转动自由度即六个关节,为肩关节三个关节、肘关节一个关节、腕关节二个关节,即左肩第一关节、左肩第二关节和左肩第三关节,左腕第一关节、左腕第二关节和左肘关节;这些关节的结构都相同。左臂通过左肩第一关节与躯干连接。以左肩第三关节为例,包括小型无刷伺服电机、低减速比减速机构和编码器;小型无刷伺服电机通过螺钉固定在基座上;小型无刷伺服电机的输出轴同多头蜗杆固连并带动多头蜗杆旋转;多头蜗杆同涡轮构成低减速比减速机构,减速比小于15;涡轮通过轴承支撑润滑,并限定涡轮旋转方向;基座上设有盖板,盖板限制多头蜗杆和涡轮的运动,保证关节刚度;编码器基座固连于盖板上,编码器转轴固连于涡轮上,以精确测量关节角度。多头蜗杆同涡轮构成低减速比减速机构,减速比设计为10。该关节设计有以下优势: 1)低减速比减速机构使关节具备力反馈功能,通过测量电流环驱动电流间接测量机器人手臂末端作用力;2)无刷电机和低减速比减速机构的配置使机器人具备较高动态响应能力和弹性,利于机器人通过同舱壁作用在舱内运动;3)在电机输入端布置绝对值编码器,提高关节控制精度;4)降低机器人结构与
关节质量。
8.机器人左手包括手掌、拇指、食指、中指、无名指、小指以及若干微型伺服电机。机器人每个手指均包括三个关节;每个手指的结构相同。由独立的微型伺服电机进行线驱动控制,控制量包括手指弯曲程度、线牵引力等形式。微型伺服电机安装于手掌内部,保持结构紧凑。以食指为例,包括食指第一关节、食指第二关节和食指第三关节;食指第一关节连接手掌;食指第三关节与指尖相连;指尖采用柔性材料一体打印成型。在指尖固连并引出一条弹性细绳,弹性细绳经食指的三个关节,缠绕并固连于微型伺服电机输出轴的同步轮上。食指各关节结构相同,安装有微型轴承以增加关节润滑,轴承上配合有销钉,销钉上套设有复位扭簧;复位扭簧辅助关节复位,销钉用于限制关节自由度。
9.机器人右臂同左臂对称、右手同左手对称。
10.机器人头部通过两个自由度颈部与躯干连接。颈部第一关节控制头部俯仰运动,采用大导程多头丝杠螺母形式传动。颈部第二关节控制头部偏航运动,采用圆柱齿轮形式传动。机器人头部设计双目视觉相机,用于视觉导航、漂浮物体检测与定位、人机智能交互等;设计可拆卸头戴,用于安装临时载荷。
11.机器人腰部设计二个自由度。腰部第一关节控制躯干在偏航方向转动,采用多头涡轮蜗杆形式传动。腰部第二关节控制躯干左倾、右倾,采用对称的大导程多头丝杠螺母传动。
12.机器人下肢包括左腿、右腿,通过腰部与躯干连接。左腿设计四个转动自由度,分别为髋关节一个自由度控制大腿抬升角度,膝关节一个自由度控制小腿与大腿之间的夹角、踝关节两个自由度控制脚掌的朝向。由于所述机器人的作业场景为微重力环境,腿部关节驱动形式同手臂关节一致,采用小型无刷伺服电机、低减速比减速机构(可以为低减速比行星减速器、低减速比谐波减速器、大导程多头丝杠螺母、多头涡轮蜗杆等形式)的配置。
13.机器人右腿同左腿对称。
14.本发明的机器人总质量20kg,高度1.70米。改进dh参数如表1所示:
15.表1机器人右臂改进dh参数
16.iα
i-1ai-1
θ
idi
190
°
0.00mm-90
°
+θ10.00mm2-90
°
39.00mm90
°
+θ281.00mm390
°
0.00mmθ3284.00mm4-90
°‑
8.00mmθ
4-6.55mm590
°‑
6.59mm-35
°
+θ5283.00mm6-90
°
0.00mmθ60.00mm
17.表1中,α
i-1
为连杆扭转角,a
i-1
为连杆长度,θi为关节角和ai为连杆偏移。
18.本发明设计多层无线控制架构实现高效、实时的舱内活动控制与作业控制。在机器人躯干配置1个中心计算单元,在四肢各配置1个边缘计算单元。中心计算单元与4个边缘计算单元之间通过低延迟5g数据链路通信,减少线路连接,降低维护需求。中心计算单元负责机器人腰部、颈部关节的位置控制、力反馈控制,实时处理与分发双目视觉数据、规划机器人舱内活动路径与作业方式,是机器人的计算中枢。各边缘计算单元分解中心计算单元指令,负责对应关节的逆运动学求解、位置控制、力反馈控制。中心计算单元同时与空间站
舱内计算服务器通过低延迟5g数据链路连接。舱内计算服务器可支援中心处理单元处理数据,保证系统的实时性。
19.该机器人在舱内活动的典型状态包括:
20.1)作业状态:机器人利用左手或右手握紧舱内把手、或利用脚掌卡住限位器,在微重力环境下通过多关节协调运动控制机器人姿态,以支持完成辅助拍摄、微重力下的物资规整、按钮操作等任务。
21.2)预飞状态:机器人利用四肢同舱壁、把手、限位器等相互作用,调整机器人的姿态与重心,提供向目标区域移动的初速度与稳定姿态。
22.3)飘飞状态:利用预飞状态提供的初速度、初始姿态,机器人在空间站舱内向目标位置飘浮靠近的过渡状态。
23.4)停靠状态:机器人在飘飞状态到达目标位置,再次利用四肢同舱壁、把手、限位器等相互作用,调整机器人姿态与重心,减速并逐步停靠在目标区域。
24.5)维护状态:机器人在充电、软件升级等情况进入维护状态。在维护状态下,机器人躯干背部同舱内停泊站刚性连接,同时机器人建立同空间站的电气连接。
25.本发明通过小型化关节驱动与传动设计,同时利用3d打印技术,降低机器人结构与关节质量,适应微重力应用场景;同时机器人设计为人形结构,能够无差别地使用人类航天员使用的工具和人机接口开展空间活动,利于机器人同航天员协作及代替航天员开展工作;机器人在舱内采用模仿航天员在失重条件下的漂浮运动方式,活动和作业范围广。
附图说明
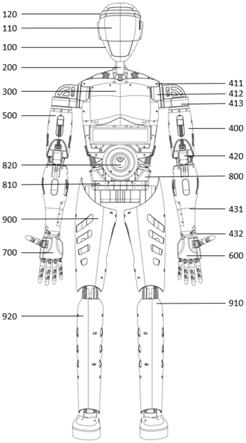
26.图1是本发明的正视图;
27.图2是本发明的后视图;
28.图3是本发明右视图;
29.图4是本发明中左肩第三关节的结构示意图;
30.图5是本发明左手的结构示意图;
31.图6是本发明中左手食指的结构示意图;
32.图7是本发明中多层无线控制架示意图。
具体实施方式
33.以下详细描述本发明的技术方案。本发明实施例仅供说明具体结构,该结构的规模不受实施例的限制。
34.实施例
35.参阅图1至图5,一种基于3d打印的空间站舱内活动人形机器人,包括头部100、颈部200、躯干300、左臂400、右臂500、左手600、右手700、腰部 800、下肢900和控制系统;头部100设有双目视觉相机110和可拆卸头戴120,可拆卸头戴120位于双目视觉相机110的上方;头部100通过颈部200与躯干 300相连;
36.颈部200设有颈部第一关节210和颈部第二关节220;其中的颈部第一关节 210为大导程多头丝杠螺母,颈部第二关节220为圆柱齿轮;
37.躯干300连接左臂400和右臂500;左臂400和右臂500结构相同;
38.左臂400包括左肩关节、左肘关节420、左腕关节;其中的左肩关节包括左肩第一关节411、左肩第二关节412和左肩第三关节413;左肩第一关节411与躯干300相连接;左腕关节包括左腕第一关节431和左腕第二关节432;通过左腕第二关节432,左臂400和左手600相连;各关节的结构相同。以左肩第三关节为例,左肩第3关节413,小型无刷伺服电机431通过螺钉固定在基座432上。电机431的输出轴同多头蜗杆433固连并带动多头蜗杆433旋转。多头蜗杆433 同涡轮434构成低减速比减速机构,减速比设计为10。涡轮434通过轴承435 支撑润滑,并限定涡轮旋转方向。盖板436限制多头蜗杆433和涡轮434的运动,保证关节刚度。编码器基座437固连于盖板436上,编码器转轴438固连于涡轮上,以精确测量关节角度。
39.左手600包括手掌610、拇指620、食指630、中指640、无名指650、小指 660以及若干微型伺服电机;微型伺服电机安装在手掌610内;拇指620、食指 630、中指640、无名指650、小指660结构相同;
40.以食指630为例,包括食指第一关节631、食指第二关节632和食指第三关节633,它们结构相同;食指第三关节633与指尖634相连;指尖为柔性材料一体打印成型;机器人其余手指设计同食指相同。
41.在指尖634固连并引出1条弹性细绳635,弹性细绳经食指的二个关节,缠绕并固连于微型伺服电机输出轴同步轮上。食指630各关节均设计微型轴承636 以增加关节润滑,销钉438和轴微型轴承636相配合,复位扭簧637套设在销钉438上,辅助关节复位。销钉438用于限制关节自由度。
42.腰部800与躯干300相连,包括腰部第一关节810和腰部第二关节820;腰部第一关节810为多头涡轮蜗杆;腰部第二关节820采用对称的大导程多头丝杆螺母;
43.下肢900通过腰部800与躯干300连接;下肢900包括左腿910和右腿920;右腿同左腿对称,且结构相同;
44.左腿910包括髋关节911、膝关节912和两个踝关节,分别为第一踝关节 913和第二踝关节914;髋关节911和膝关节912结构相同,包括小型无刷伺服电机、低减速比减速机构和电机输入端的绝对编码器。髋关节9111个自由度控制大腿915抬升角度,膝关节912的一个自由度控制小腿916与大腿915之间的夹角、踝关节两个自由度控制脚掌917的朝向。
45.躯干内配置一个中心计算单元,在左臂、右臂、左腿和右腿各配置一个边缘计算单元;中心计算单元与四个边缘计算单元和舱内计算服务器通过低延迟 5g数据链路通信。
46.本发明中所提到的低减速比减速机构,可以是低减速比行星减速器、低减速比谐波减速器、大导程多头丝杠螺母、多头涡轮蜗杆中的一种。
47.机器人总质量20kg,高度1.70米。左臂和右臂的dh参数相同;以机器人右臂500为例,给出其改进dh参数如表1所示。
48.表1机器人右臂改进dh参数
49.iα
i-1ai-1
θ
idi
190
°
0.00mm-90
°
+θ10.00mm2-90
°
39.00mm90
°
+θ281.00mm390
°
0.00mmθ3284.00mm4-90
°‑
8.00mmθ
4-6.55mm590
°‑
6.59mm-35
°
+θ5283.00mm
6-90
°
0.00mmθ60.00mm
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1