水下机器人的制作方法
1.本实用新型涉及水下机械设备领域,具体是指一种水下机器人。
背景技术:
2.近年来,随着经济的发展,水下机器人被广泛用于水下环境监测,工程进度及质量监测等,监测设备通常设置在机器人上端,监测范围有限,本技术人于2020年6月17日申请了专利号为cn212243757u,名称为全方位水下监测机器人,包括机架,所述机架上设有电气舱和检测设备,所述电气舱内设有控制系统,所述控制系统经电缆与水上控制箱相连接,其特征在于:所述机架上设有检测设备驱动机构,所述检测设备驱动机构一端与机架连接,另一端与检测设备连接,所述检测设备经检测设备驱动机构驱动可伸出机架置于机架上方或机架前方或机架下方,所述检测设备驱动机构包括第一套筒、第二套筒、连接架、第一驱动电机和第一旋转轴,所述第一套筒和第二套筒间隔设置,所述第一套筒和第二套筒之间设有连接架,所述第一套筒外壁与机架固定连接,所述第一套筒内设有第一驱动电机,所述第一套筒两端分别设有第一旋转轴,所述第一套筒一端的第一旋转轴与第一驱动电机的输出轴固定连接,所述第一旋转轴一端经轴承、轴承座与第一套筒内壁密封连接,第一旋转轴另一端与连接架一端固定连接,所述连接架另一端与第二套筒一端固定连接,所述第二套筒另一端与检测设备固定连接,所述第一驱动电机与第一套筒内壁固定连接,所述第一驱动电机与控制系统相连接,所述机架上设有配重平衡机构,所述配重平衡机构包括配重块、丝杆和配重电机,上述专利的不足是:一是结合附图,可以看出上述专利中检测设备驱动机构占据了机架中间一半的空间,这就导致机架上安装别的装置位置有限;二是上述专利的检测设备是通过轴旋转带动检测设备向上向下旋转,结构庞大,调节不便;三是上述机构需要配合配重机构来实现机架平衡,若是两者配合不当,则很容易导致机架失衡,发生危险。
技术实现要素:
3.本实用新型的目的是为了解决现有技术不足,提供一种结构巧妙、调节方便、占用机架空间小、灵活性高、安全性好的水下机器人。
4.为实现上述目的,本实用新型所采用的技术方案是:
5.一种水下机器人,包括机架,所述机架上设有控制系统和云台,其特征在于:所述机架上设有云台驱动机构,所述云台驱动机构包括固定架、升降电机、导向杆、螺杆、螺母和连接架,所述机架前端设有固定架,所述固定架与机架固定连接,所述固定架上间隔设有升降电机、螺杆和导向杆,所述升降电机固定在固定架上,升降电机由控制系统控制,螺杆两端经轴承与固定架固定连接,所述螺杆由升降电机驱动,所述螺杆上设有螺母,所述螺母与螺杆螺纹连接,螺母与连接架固定连接,所述连接架上至少设有一个导向杆孔,所述导向杆穿过连接架,导向杆两端与固定架固定连接,所述云台固定在连接架上,云台可置于机架前端或置于机架下方,以利于升降电机驱动齿轮旋转,齿轮通过齿轮啮合带动螺杆旋转,进而实现螺母的上下位移,螺母带动连接架在导向杆导向下上下移动,使得云台可置于机架下
方或置于机架前端。
6.本实用新型所述连接架和云台之间设有云台旋转机构,所述云台旋转机构包括旋转电机、旋转主动齿轮和旋转从动齿轮,所述旋转电机固定在连接架上,旋转电机由控制系统驱动,所述旋转电机的输出轴上固定有旋转主动齿轮,所述旋转主动齿轮与旋转从动齿轮啮合,所述旋转从动齿轮的从动轴经轴承与连接架固定连接,所述旋转从动齿轮的从动轴与云台固定连接,以利于旋转电机驱动齿轮旋转,齿轮通过齿轮啮合实现云台的360
°
旋转。
7.本实用新型所述连接架上设有检测机构,所述检测机构包括编码器、连接齿轮和连接齿轮套,所述旋转主动齿轮和旋转从动齿轮之间设有连接齿轮,所述旋转主动齿轮与连接齿轮啮合,连接齿轮与旋转从动齿轮啮合,所述连接齿轮固定在连接齿轮套上,所述连接齿轮套经轴承与连接架固定连接,所述连接齿轮套与编码器固定连接,所述编码器与控制系统相连接,以利于通过编码器采集旋转电机旋转的角度、转速等信息,进而控制云台的旋转角度和旋转速度。
8.本实用新型所述连接架上设有走线机构,所述走线机构包括滑环和分线盒,所述旋转从动齿轮的从动轴呈空心状,所述从动轴上端设有滑环,下端设有分线盒,所述分线盒上端与从动轴固定连接,下端与云台固定连接,所述滑环与从动轴固定连接,滑环一端的引线与控制系统连接,滑环另一端的引线穿过从动轴、分线盒与云台内电机连接,以利于通过走线机构实现云台的内部走线,避免导线堆积和缠绕在云台外部,妨碍云台转动。
9.本实用新型所述机架前端或后端设有凹槽,所述云台驱动机构设置在凹槽内,以利于提高机架整体的协调性和灵活性。
10.本实用新型所述云台上安装有声呐和/或摄像机,以利于通过声呐、摄像机对水下情况进行扫描和监测。
11.本实用新型所述升降电机和螺杆之间设有传动机构,所述传动机构包括升降主动齿轮和升降从动齿轮,所述升降电机的驱动轴上固定有升降主动齿轮,所述升降主动齿轮与升降从动齿轮啮合,所述升降从动齿轮与螺杆固定连接,以利于提高云台驱动机构的稳定性。
12.本实用新型由于采用上述结构,具有结构巧妙、调节方便、占用机架空间小、灵活性高、安全性好等优点。
附图说明
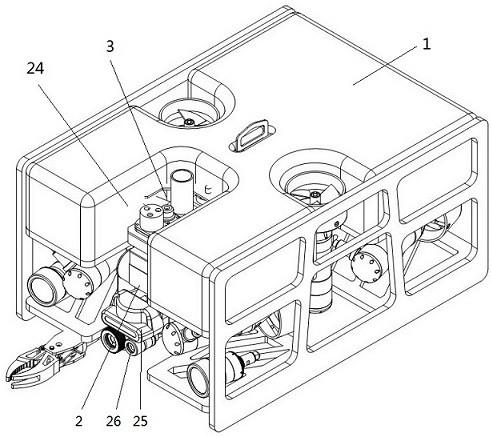
13.图1是本实用新型的结构示意图。
14.图2是本实用新型中云台下降置于机架下方的结构示意图。
15.图3是本实用新型中云台驱动机构的一种结构示意图。
16.图4是本实用新型中云台驱动机构的另一种结构示意图。
17.图5是本实用新型图4的剖视图。
18.图6是本实用新型图4中云台下降的结构示意图。
19.附图标记:机架1,云台2,云台驱动机构3,固定架4,升降电机5,升降主动齿轮6,升降从动齿轮7,导向杆8,螺杆9,螺母10,连接架11,云台旋转机构12,旋转电机13,旋转主动齿轮14,旋转从动齿轮15,检测机构16,编码器17,连接齿轮18,连接齿轮套19,走线机构20,
滑环21,分线盒22,从动轴23,凹槽24,声呐25,摄像机26。
具体实施方式
20.下面结合附图,对本实用新型的具体实施方式作进一步详细描述。
21.一种水下机器人,包括机架1,所述机架1上设有控制系统和云台2,其特征在于:所述机架1上设有云台驱动机构3,所述云台驱动机构3包括固定架4、升降电机5、导向杆8、螺杆9、螺母10和连接架11,所述机架1前端设有固定架4,所述固定架4与机架1固定连接,所述固定架4上间隔设有升降电机5、螺杆9和导向杆8,所述升降电机5固定在固定架4上,升降电机5由控制系统控制,螺杆9两端经轴承与固定架4固定连接,所述螺杆9由升降电机5驱动,所述螺杆9上设有螺母10,所述螺母10与螺杆9螺纹连接,螺母10与连接架11固定连接,所述连接架11上至少设有一个导向杆孔,所述导向杆8穿过连接架11,导向杆8两端与固定架4固定连接,所述云台2固定在连接架11上,云台2可置于机架1前端或置于机架1下方,以利于升降电机驱动齿轮旋转,齿轮通过齿轮啮合带动螺杆旋转,进而实现螺母的上下位移,螺母带动连接架在导向杆导向下上下移动,使得云台可置于机架下方或置于机架前端。
22.本实用新型所述连接架11和云台2之间设有云台旋转机构12,所述云台旋转机构12包括旋转电机13、旋转主动齿轮14和旋转从动齿轮15,所述旋转电机13固定在连接架11上,旋转电机13由控制系统驱动,所述旋转电机13的输出轴上固定有旋转主动齿轮14,所述旋转主动齿轮14与旋转从动齿轮15啮合,所述旋转从动齿轮15的从动轴23经轴承与连接架11固定连接,所述旋转从动齿轮15的从动轴23与云台2固定连接,以利于旋转电机驱动齿轮旋转,齿轮通过齿轮啮合实现云台的360
°
旋转。
23.本实用新型所述连接架11上设有检测机构16,所述检测机构16包括编码器17、连接齿轮18和连接齿轮套19,所述旋转主动齿轮14和旋转从动齿轮15之间设有连接齿轮18,所述旋转主动齿轮14与连接齿轮18啮合,连接齿轮18与旋转从动齿轮15啮合,所述连接齿轮18固定在连接齿轮套19上,所述连接齿轮套19经轴承与连接架11固定连接,所述连接齿轮套19与编码器17固定连接,所述编码器17与控制系统相连接,以利于通过编码器采集旋转电机旋转的角度、转速等信息,进而控制云台的旋转角度和旋转速度。
24.本实用新型所述连接架11上设有走线机构20,所述走线机构20包括滑环21和分线盒22,所述旋转从动齿轮15的从动轴23呈空心状,所述从动轴23上端设有滑环21,下端设有分线盒22,所述分线盒22上端与从动轴23固定连接,下端与云台2固定连接,所述滑环21与从动轴23固定连接,滑环21一端的引线与控制系统连接,滑环21另一端的引线穿过从动轴23、分线盒22与云台2内电机连接,以利于通过走线机构实现云台的内部走线,避免导线堆积和缠绕在云台外部,妨碍云台转动。
25.本实用新型所述机架1前端或后端设有凹槽24,所述云台驱动机构3设置在凹槽24内,以利于提高机架整体的协调性和灵活性。
26.本实用新型所述云台2上安装有声呐25和/或摄像机26,以利于通过声呐、摄像机对水下情况进行扫描和监测。
27.本实用新型所述升降电机5和螺杆9之间设有传动机构,所述传动机构包括升降主动齿轮6和升降从动齿轮7,所述升降电机5的驱动轴上固定有升降主动齿轮6,所述升降主动齿轮6与升降从动齿轮7啮合,所述升降从动齿轮7与螺杆9固定连接,以利于提高云台驱
动机构的稳定性。
28.本实用新型中的机器人采用现有技术中的机器人,机器人的机架上可设置推进器、浮体、摄像机、照明灯等设备,机器人的控制系统可通过电缆连接水上控制平台,方便控制机器人在水下作业,此部分与现有技术相同,不赘述,本实用新型的云台上可搭载声呐、摄像机和照明灯等监测照明设备,机器人可用于水下巡逻或监测或拍摄影像,根据实际需要设置即可,本实用新型中机架前端或后端开有一个u型开口凹槽,云台和云台驱动机构设置在凹槽内,本实用新型中螺杆的连接驱动可以采用两种方式,一种如附图3所示,升降电机直接驱动螺杆,带动螺杆旋转,实现螺母的升降;另一种如附图4
‑
附图6,升降电机通过输出轴驱动升降驱动齿轮旋转,升降驱动齿轮通过齿轮啮合带动升降从动齿轮旋转,进而带动螺杆旋转,实现螺母的升降;两种方式根据需求灵活设置,使用时,当需要监测机架下方的情况时,启动升降电机,升降电机带动螺杆旋转,螺杆旋转带动螺母向下移动,螺母带动连接架在导向杆导向下向下移动,实现云台的下降,当需要云台转动角度时,启动旋转电机,通过齿轮啮合带动云台旋转,通过编码器控制云台的旋转角度和旋转速度;当云台不使用或者只需要在机架前端使用时,启动升降电机,带动云台上升,使得云台置于机架前端的凹槽内,不会阻碍或者遮挡机架前端视野,不影响其他作业工具作业,本实用新型结构小巧,调节快速方便,不会引起机架重心移动,操作十分安全,机架灵活性高。
29.本实用新型由于采用上述结构,具有结构巧妙、调节方便、占用机架空间小、灵活性高、安全性好、机架灵活性高等优点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1