一种基于视觉检测技术的机器人的制作方法
1.本技术涉及一种基于视觉检测技术的机器人,属于工业机器人技术领域。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、包装等各个工业领域之中。
3.一个机器人末端执行器指的是任何一个连接在机器人边缘(关节)具有一定功能的工具,常用的末端工具有单一式工具和快换式工具两种。根据不同的应用场景,单一式的机器人末端工具有手爪、吸盘、焊枪、喷枪等。单一式的机器人末端工具只能适用某一固定物料的作业,针对多品种物料,单一式末端工具存在一定的局限性。
4.利用单一工业机器人对物料运输线上的不同种类的物料进行夹取工序时,由于物料的不同种类以及物料的摆放状态都是不确定的,同时由于物料在运输带上是处于移动状态的,传统的工业机器人需要每次移动至物料位置时都要进行末端执行器的重新校正,以保证末端工具对物料的精准定位,这样就会造成物料运输线间隔式停止以便工业机器人进行校正,使得生产效率低下,机械自动化不高的情况。
技术实现要素:
5.对现有技术中存在的问题与不足,本技术提供一种基于视觉检测技术的机器人,通过设置物料视觉检测装置,可对物料运输线上的物料进行预先检测,以保证机器人的机械手臂在移动前获得物料的实际位置和物料的摆放姿态,机械手臂可在移动过程中完成姿态调整和物料位置预估,无需将物料运输线停止进行校正,同时配合可调节式吸盘夹具,可对于不同尺寸的物料进行夹持部的轴向和径向距离调节,以满足不同尺寸的物料的夹取工作,减少末端工具的数量,提高工作效率。
6.为实现上述目的,本技术提供一种基于视觉检测技术的机器人,包括:
7.物料运输线,设有一条运输带,物料从运输带放料侧放入由运输带运输至另一侧;
8.物料视觉检测装置,用于检测运输带上的物料的位置以及物料摆放姿态;
9.工业机器人,设有多关节机械手臂,可进行机械手臂多自由度转动;
10.物料视觉检测装置固定安装在物料运输线的放料侧,且其设有若干个检测传感器;检测传感器的检测区域穿过运输带;机械手臂末端可安装末端工具;物料从运输带放料侧放入,工业机器人通过物料视觉检测装置对物料进行检测后,通过调节机械手臂的角度,并带动末端工具移动至物料位置,对物料进行夹取或加工工作。
11.具体的,物料运输线包括运输架和运输带;运输带由若干个并联的滚筒轮组成,且其安装在运输架的上侧。设置由滚筒轮组成的运输带,可减少物料运输阻力,便于快速运输,也使得物料在运输带上的速度能保持一致。
12.具体的,物料视觉检测装置包括检测架和三个检测传感器;检测架为一门形架,且
其横跨在运输带的上侧;两个检测传感器相对平行安装在检测架的两侧,另一个检测传感器固定安装在检测架的上侧。将检测架设置为门形,且横跨在运输带上侧,同时在检测架两侧与上侧分别设安装检测传感器,能保证检测传感器对物料的精准检测。
13.具体的,工业机器人还包括安装座和旋转台;多关节机械手臂固定安装在旋转台上;旋转台可进行圆周转动,且其与安装座固定连接。这样设置旋转台可使得机械手臂在其工作半径中进行多自由度移动,保证机械手臂的末端工具可实现任何角度移动。
14.具体的,末端工具为可调节式吸盘夹具;可调节式吸盘夹具包括安装板、两块滑动板和第一滑轨;安装板一侧设有安装法兰与机械手臂末端固定连接,另一侧表面固定安装有第一滑轨;两块滑动板相对平行滑动安装在第一滑轨上,且其由动力装置驱动进行相对或相向往复滑动。两块滑动板上分别设有第二滑轨、栅栏伸缩组件和若干个吸盘;栅栏伸缩组件滑动安装在第二滑轨上,且其由动力装置驱动沿第二滑轨往复伸缩运动;若干个吸盘固定安装在栅栏伸缩组件上。第一滑轨与第二滑轨在空间上相互垂直。这样设置可使得由若干个吸盘组成的吸盘夹持部,可通过滑动板以及栅栏伸缩组件分别在第一滑轨和第二滑轨上往复滑动,实现吸盘夹持部在径向和轴向上进行长度调节,以满足对不同尺寸的物料都能进行夹取工作,提高吸盘夹具的适用范围。
15.与现有技术相比,本技术的有益效果在于:
16.1.本技术通过在物料视觉检测装置对物料运输带上的物料进行检测,以获取物料在运输带上的摆放位置、物料姿态和物料的尺寸,并由此调节工业机器人的机械手臂的角度,并通过机械手臂带动末端工具移动至物料的位置进行夹取或加工工序,对于物料多种类时,提高设备适用范围,也提高了生产效率。
17.2.本技术通过适用可调节式吸盘夹具,可对于不同尺寸的物料,通过物料视觉检测装置检测到的实际物料尺寸,调节吸盘夹具的吸盘夹持部的轴向和径向长度,以达到夹持部与物料外形相适配,提高单一式末端工具的适用范围,提高生产效率的同时也降低了生产成本。
附图说明
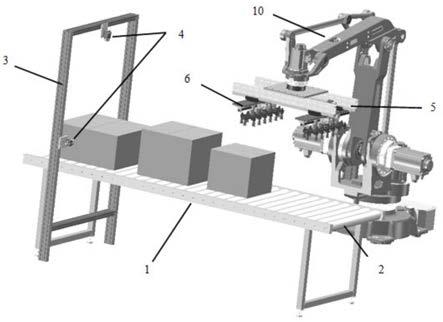
18.图1为本实施例基于视觉检测技术的机器人示意图;
19.图2为本实施例吸盘夹具示意图。
20.图中:1、运输带;2、滚筒轮;3、检测架;4、检测传感器;5、第一滑轨;6、滑动板;7、栅栏伸缩组件;8、吸盘;9、第二滑轨;10、机械手臂。
具体实施方式
21.下面将结合本技术实施例中的附图,进一步阐述本技术。
22.请参阅图1
‑
2本实施例公开了一种基于视觉检测技术的机器人,包括:
23.物料运输线,设有一条运输带1,物料从运输带1放料侧放入由运输带1运输至另一侧;
24.物料视觉检测装置,用于检测运输带1上的物料的位置以及物料摆放姿态;
25.工业机器人,设有多关节机械手臂10,可进行机械手臂10多自由度转动;
26.物料视觉检测装置固定安装在物料运输线的放料侧,且其设有若干个检测传感器
4;检测传感器4的检测区域穿过运输带1;机械手臂10末端可安装末端工具;物料从运输带1放料侧放入,工业机器人通过物料视觉检测装置对物料进行检测后,通过调节机械手臂10的角度,并带动末端工具移动至物料位置,对物料进行夹取或加工工作。实现了机器人的基本工作需求。
27.进一步的,物料运输线包括运输架和运输带1;运输带1由若干个并联的滚筒轮2组成,且其安装在运输架的上侧。实现了物料运输线的构成。
28.进一步的,物料视觉检测装置包括检测架3和三个检测传感器4;检测架3为一门形架,且其横跨在运输带1的上侧;两个检测传感器4相对平行安装在检测架3的两侧,另一个检测传感器4固定安装在检测架3的上侧。实现了物料视觉检测装置的构成。
29.进一步的,工业机器人还包括安装座和旋转台;多关节机械手臂10固定安装在旋转台上;旋转台可进行圆周转动,且其与安装座固定连接。实现了工业机器人的构成。
30.进一步的,末端工具为可调节式吸盘夹具;可调节式吸盘夹具包括安装板、两块滑动板6和两个第一滑轨5;安装板一侧设有安装法兰与机械手臂10末端固定连接,另一侧表面固定安装有第一滑轨5;两块滑动板6相对平行滑动安装在第一滑轨5上,且其由动力装置驱动进行相对或相向往复滑动。两块滑动板6上分别设有第二滑轨9、栅栏伸缩组件7和若干个吸盘8;栅栏伸缩组件7滑动安装在第二滑轨9上,且其由动力装置驱动沿第二滑轨9往复伸缩运动;若干个吸盘8固定安装在栅栏伸缩组件7上。第一滑轨5与第二滑轨9在空间上相互垂直。实现了末端工具的构成。
31.工作原理:1.工作前,需要通过吸盘夹具安装板上的安装法兰与工业机器人机械手臂10连接,同时将吸盘夹具的第一滑轨5安装方向与运输带1的运输方向调整为相互平行,便于机械手臂10的快速定位,实现吸盘夹具的安装。
32.2.工作时,物料从物料运输线放料侧放入运输带1,物料通过滚筒轮2的转动在运输带1上匀速移动。物料视觉检测装置上的检测传感器4对物料进行扫描检测,以获得物料的外形尺寸以及物料在运输带1上的摆放位置。工业机器人根据物料运输线上的物料外形尺寸,当物料为大长方形物料时,吸盘夹具的两块滑动板6在动力装置的驱动下沿第一滑轨5相向滑动,同时两块滑动板6上的栅栏伸缩组件7在动力装置的驱动下沿第二滑轨9轴向伸长,栅栏伸缩组件上设有的吸盘8组成的夹持部,形成一与大长方形物料相适配的大长方形结构,然后通过工业机器人机械手臂10移动至物料位置,再对物料进行夹取并移送至存料工位。反之物料为小长方形时,则通过滑动板6沿第一滑轨5相向滑动,栅栏伸缩组件7沿第二滑轨9轴向收缩滑动,栅栏伸缩组件上设有的吸盘8组成的夹持部,形成一与小长方形物料相适配的小长方形结构,再进行夹取工作。同时物料视觉检测装置检测物料在运输带上的摆放姿态,工业机器人通过调整机械手臂10的角度,使吸盘夹具相对物料的角度相适配,提高夹取的牢固。
33.上面结合实施例对本发明的实施方式作了详细说明,但是本技术并不限于上述实施方式,对于本技术领域的普通技术人员来说,在获知本发明中记载内容后,在不脱离本发明原理的前提下,还可以对其作出若干同等变换和替代,这些同等变换和替代也应视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1