一种人工智能教育机器人的防撞组件的制作方法
1.本实用新型涉及机器人技术领域,具体是一种人工智能教育机器人的防撞组件。
背景技术:
2.人工智能教育机器人主要应用于教育领域,主要以展示机械结构、运动特征和功能关系为主,在人工智能教育机器人移动过程中,需要通过防撞组件加强机器人外侧的保护;
3.但是,现有的防撞组件在使用过程中,大多保护范围有限,且长时间使用后存在容易变形和影响防撞效果的问题,同时安装维护较为困难,外侧防撞框体难以更换,因此,本领域技术人员提供了一种人工智能教育机器人的防撞组件,以解决上述背景技术中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种人工智能教育机器人的防撞组件,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种人工智能教育机器人的防撞组件,包括固定板,所述固定板的外侧连接有挤压弹簧,所述挤压弹簧的另一端活动连接有多角度防撞框体,所述多角度防撞框体的外侧固定有限位柱,所述固定板的外侧设置有限位机构,所述固定板的内部开设有通孔,所述限位机构的外侧固定有连接块;
7.所述限位机构包括保护套,所述保护套的外侧开设有u形槽,所述限位柱内部开设有安装孔,所述限位柱的一侧设置有贯穿其另一侧的限位杆,所述固定板的内部开设有限位孔,所述保护套的一侧设置有延伸至所述固定板另一侧的螺纹杆,所述螺纹杆的一端固定有把手块,所述螺纹杆的外侧螺纹连接有螺纹套,所述保护套的内部开设有活动槽,所述固定板的内部嵌入有磁铁块。
8.作为本实用新型再进一步的方案:所述螺纹套的外侧设置有防滑纹。
9.作为本实用新型再进一步的方案:所述限位孔的尺寸与所述限位杆的尺寸适配。
10.作为本实用新型再进一步的方案:所述磁铁块与所述限位杆的外侧贴合。
11.作为本实用新型再进一步的方案:所述固定板的内部开设有安装孔,且该安装孔的尺寸与所述螺纹杆的尺寸适配。
12.作为本实用新型再进一步的方案:所述保护套的一侧与所述固定板一侧贴合,所述连接块与所述保护套之间焊接固定。
13.与现有技术相比,本实用新型的有益效果是:
14.1、本装置在使用时,可减轻撞击对人工智能教育机器人的影响,且多角度防撞框体可对多角度的撞击进行保护,提升了保护范围,限位柱能够为多角度防撞框体导向,确保多角度防撞框体移动过程中整体结构的稳定,避免了容易变形和影响防撞效果的问题。
15.2、本装置设置有限位机构,可方便地将多角度防撞框体连同限位柱进行更换,更换过程简便,操作较为方便,达到了多角度防撞框体易于更换和安装维护较为简便的目的。
附图说明
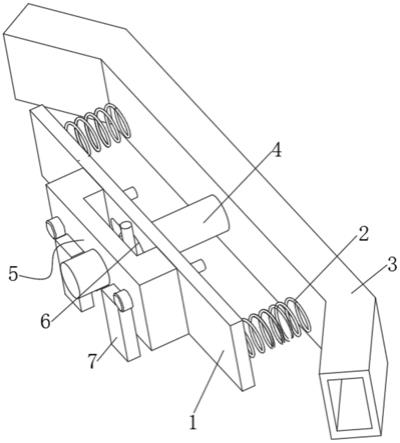
16.图1和图2为一种人工智能教育机器人的防撞组件不同角度的立体图;
17.图3为一种人工智能教育机器人的防撞组件中限位机构的立体图。
18.图中:1、固定板;2、挤压弹簧;3、多角度防撞框体;4、限位柱;5、限位机构;6、通孔;7、连接块;51、保护套;52、u形槽;53、限位杆;54、限位孔;55、螺纹杆;56、把手块;57、螺纹套;58、活动槽;59、安装孔;510、磁铁块。
具体实施方式
19.请参阅图1-3,本实用新型实施例中,一种人工智能教育机器人的防撞组件,包括固定板1,固定板1的外侧连接有挤压弹簧2,挤压弹簧2的另一端活动连接有多角度防撞框体3,多角度防撞框体3的外侧固定有限位柱4,固定板1的外侧设置有限位机构5,固定板1的内部开设有通孔6,限位机构5的外侧固定有连接块7,连接块7以及固定板1均固定在人工智能教育机器人的外侧,此时通过固定板1外侧的挤压弹簧2提供弹力,能够推动多角度防撞框体3向外侧移动,当固定板1外侧受到撞击时,多角度防撞框体3可承担大部分压力,且通过挤压弹簧2以及限位柱4的配合使用,分担大部分压力,减轻撞击对人工智能教育机器人的影响,多角度防撞框体3可对多角度的撞击进行保护,提升了保护范围;
20.限位机构5包括保护套51,保护套51的外侧开设有u形槽52,限位柱4内部开设有安装孔59,限位柱4的一侧设置有贯穿其另一侧的限位杆53,固定板1的内部开设有限位孔54,限位孔54的尺寸与限位杆53的尺寸适配,保护套51的一侧设置有延伸至固定板1另一侧的螺纹杆55,固定板1的内部开设有安装孔,且该安装孔的尺寸与螺纹杆55的尺寸适配,螺纹杆55的一端固定有把手块56,螺纹杆55的外侧螺纹连接有螺纹套57,螺纹套57的外侧设置有防滑纹,保护套51的内部开设有活动槽58,固定板1的内部嵌入有磁铁块510,需要对多角度防撞框体3进行更换时,只需按压多角度防撞框体3的外侧,再将限位柱4转动90
°
即可,此时限位柱4外侧的限位杆53能够一并转动,且限位杆53以及限位柱4能够从对应的限位孔54以及活动槽58内脱出,可将多角度防撞框体3连同限位柱4进行更换,更换过程简便,操作较为方便。
21.本实用新型的工作原理是:本装置在使用时,连接块7以及固定板1均固定在人工智能教育机器人的外侧,此时通过固定板1外侧的挤压弹簧2提供弹力,能够推动多角度防撞框体3向外侧移动,当固定板1外侧受到撞击时,多角度防撞框体3可承担大部分压力,且通过挤压弹簧2以及限位柱4的配合使用,分担大部分压力,减轻撞击对人工智能教育机器人的影响,多角度防撞框体3可对多角度的撞击进行保护,提升了保护范围,且限位柱4能够为多角度防撞框体3导向,确保多角度防撞框体3移动过程中整体结构的稳定,避免了容易变形和影响防撞效果的问题;本装置设置有限位机构5,保护套51外侧的螺纹杆55贯穿固定板1,并通过螺纹套57完成保护套51与固定板1之间的固定,当挤压弹簧2的一侧推动多角度防撞框体3时,限位柱4外侧的限位杆53抵在固定板1的外侧,限位杆53可吸附在对应磁铁块510的外侧,完成限位柱4的限位与固定,需要对多角度防撞框体3进行更换时,只需按压多
角度防撞框体3的外侧,再将限位柱4转动90
°
即可,此时限位柱4外侧的限位杆53能够一并转动,且限位杆53以及限位柱4能够从对应的限位孔54以及活动槽58内脱出,可将多角度防撞框体3连同限位柱4进行更换,更换过程简便,操作较为方便,达到了多角度防撞框体3易于更换和安装维护较为简便的目的。
22.以上的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种人工智能教育机器人的防撞组件,包括固定板(1),其特征在于,所述固定板(1)的外侧连接有挤压弹簧(2),所述挤压弹簧(2)的另一端活动连接有多角度防撞框体(3),所述多角度防撞框体(3)的外侧固定有限位柱(4),所述固定板(1)的外侧设置有限位机构(5),所述固定板(1)的内部开设有通孔(6),所述限位机构(5)的外侧固定有连接块(7);所述限位机构(5)包括保护套(51),所述保护套(51)的外侧开设有u形槽(52),所述限位柱(4)内部开设有安装孔(59),所述限位柱(4)的一侧设置有贯穿其另一侧的限位杆(53),所述固定板(1)的内部开设有限位孔(54),所述保护套(51)的一侧设置有延伸至所述固定板(1)另一侧的螺纹杆(55),所述螺纹杆(55)的一端固定有把手块(56),所述螺纹杆(55)的外侧螺纹连接有螺纹套(57),所述保护套(51)的内部开设有活动槽(58),所述固定板(1)的内部嵌入有磁铁块(510)。2.根据权利要求1所述的一种人工智能教育机器人的防撞组件,其特征在于,所述螺纹套(57)的外侧设置有防滑纹。3.根据权利要求1所述的一种人工智能教育机器人的防撞组件,其特征在于,所述限位孔(54)的尺寸与所述限位杆(53)的尺寸适配。4.根据权利要求1所述的一种人工智能教育机器人的防撞组件,其特征在于,所述磁铁块(510)与所述限位杆(53)的外侧贴合。5.根据权利要求1所述的一种人工智能教育机器人的防撞组件,其特征在于,所述固定板(1)的内部开设有安装孔,且该安装孔的尺寸与所述螺纹杆(55)的尺寸适配。6.根据权利要求1所述的一种人工智能教育机器人的防撞组件,其特征在于,所述保护套(51)的一侧与所述固定板(1)一侧贴合,所述连接块(7)与所述保护套(51)之间焊接固定。
技术总结
本实用新型涉及机器人技术领域,公开了一种人工智能教育机器人的防撞组件,包括固定板,所述固定板的外侧连接有挤压弹簧,所述挤压弹簧的另一端活动连接有多角度防撞框体,所述多角度防撞框体的外侧固定有限位柱;本装置在使用时,可减轻撞击对人工智能教育机器人的影响,且多角度防撞框体可对多角度的撞击进行保护,提升了保护范围,限位柱能够为多角度防撞框体导向,确保多角度防撞框体移动过程中整体结构的稳定,避免了容易变形和影响防撞效果的问题;本装置设置有限位机构,可方便地将多角度防撞框体连同限位柱进行更换,更换过程简便,操作较为方便,达到了多角度防撞框体易于更换和安装维护较为简便的目的。更换和安装维护较为简便的目的。更换和安装维护较为简便的目的。
技术研发人员:张人杰
受保护的技术使用者:张人杰
技术研发日:2021.09.06
技术公布日:2022/2/7
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1