智能物料柜和用于轨道交通机车/车辆轴端盖的拆装系统的制作方法
1.本公开涉及轨道交通机车/车辆检修技术领域,具体地,涉及一种智能物料柜和用于轨道交通机车/车辆轴端盖拆装系统。
背景技术:
2.轨道交通机车/车辆在运用过程中,零部件会逐渐磨耗、腐蚀和损伤,为使轨道交通机车/车辆在良好的状态下稳定可靠地运行,延长使用期限,必须对轨道交通机车/车辆进行定期的检查和检修。在轨道交通机车/车辆的现场检修过程中,需要将轴箱盖拆卸下来,以对车轴进行探伤检测。
3.目前,轨道交通机车/车辆轴端盖拆装作业以人工手拧或是以人工的单轴拧紧器实现,物料的存放以独立的物料车实现。
技术实现要素:
4.本公开的目的是提供一种智能物料柜和用于轨道交通机车/车辆轴端盖的拆装系统,能够智能控制抽屉的开合,并能够有序地存放零部件。
5.为了实现上述目的,本公开提供一种智能物料柜,所述智能物料柜包括柜体、多个轴端物料储存抽屉、旧螺栓储存抽屉和控制系统,所述柜体的顶部设置有用于拆装螺栓的拆装设备,所述多个轴端物料储存抽屉和所述旧螺栓储存抽屉分别滑动地连接于所述柜体,所述多个轴端物料储存抽屉与所述轴端盖一一对应,并且每个轴端物料储存抽屉通过各自对应的第一锁紧装置可解锁地锁定于所述柜体,所述旧螺栓储存抽屉通过第二锁紧装置可解锁地锁定于所述柜体,所述控制系统与所述第一锁紧装置电连接,以根据所述拆装设备的作业流程控制相应的所述第一锁紧装置解锁。
6.在上述技术方案的基础上,本公开还提供一种用于轨道交通机车/车辆轴端盖的拆装系统,该拆装系统包括上述智能物料柜、拆装设备和扭力校验装置,所述拆装设备设置在所述智能物料柜上,所述扭力校验装置用于校验所述拆装设备的扭力。
7.通过上述技术方案,本公开提供的智能物料柜通过轴端物料储存抽屉和旧螺栓储存抽屉能够对轴端物料、所拆卸下的旧螺栓以及待安装的新螺栓进行有序地存放,其中,轴端物料储存抽屉的数量与轨道交通机车/车辆轴端盖的数量相等且一一对应,在当前轴端盖拆卸操作流程未执行结束之前,控制系统控制当前轴端盖所对应的轴端物料储存抽屉处于解锁状态,其它轴端物料储存抽屉均处于锁闭状态,在控制系统确认当前轴端盖拆卸操作流程执行结束后,控制系统控制当前轴端盖所对应的轴端物料储存抽屉处于锁闭状态,并控制下一轴端盖所对应的轴端物料储存抽屉打开,从而智能控制抽屉的开合。通过这种设置方式,每个轴端盖上的轴端物料存放在各自对应的轴端物料储存抽屉中,不会出现不同轴端盖的轴端物料混用的问题。
8.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
第一防护罩;51-第一扶手;52-第二扶手;53-引导滑块;54-引导滑轨;55-第二防护罩;56-限位止挡;57-第一支承座;58-第二支承座;59-第一旋转轴承;510-调节件;511-第一轴承座;512-第二轴承座;513-第二旋转轴承;514-固定座;515-锁紧件;516-锁紧盘;517-壳体;518-第一拧紧机;519-第二拧紧机;520-驱动电机;521-传动轴;522-传动齿轮;523-安装架;524-滑轨;525-滑块;526-第一齿条;527-位置拨杆;528-位移尺;529-第二齿条;530-支撑块;61-第一摄像头;62-第二摄像头;63-显示装置;64-广角摄像头;65-存储器;71-扭力校验壁挂端;72-扭力检验桌面显示;73-触摸显示工控一体机;74-第一扭力传感器;75-第二扭力传感器。
具体实施方式
28.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
29.在本公开中,在未作相反说明的情况下,使用的方位词如“内、外”是指相对于对应的部件自身轮廓而言的“内、外”。另外,本公开所使用的方位词如“前、后”是以壳体517处于作业位置时为基准进行定义的,靠近待作业的轨道交通机车/车辆轴端盖的方位为“前”,反之为“后”。此外,本公开所使用的术语“第一”、“第二”、“第三”等是为了区分一个要素和另一个要素,不具有顺序性和重要性。此外,在下面的描述中,当涉及到附图时,除非另有解释,不同的附图中相同的附图标记表示相同或相似的要素。上述定义仅用于解释和说明本公开,不应当理解为对本公开的限制。
30.根据本公开第一方面的具体实施方式,参考图1至图11中所示,提供一种用于轨道交通机车/车辆轴端盖的拆装设备,拆装设备包括:壳体517,壳体517连接于承载平台3;第一拧紧机518和第二拧紧机519,第一拧紧机518和第二拧紧机519用于拆装轨道交通机车/车辆轴端盖上的螺栓并且分别滑动地安装于壳体517;同步移动机构,同步移动机构包括驱动电机520、第一齿条526、第二齿条529和传动齿轮522,驱动电机520固定安装于壳体517,第一齿条526和第二齿条529分别滑动地连接于壳体517并且分别连接第一拧紧机518和第二拧紧机519,传动齿轮522传动连接于驱动电机520的输出端并且与第一齿条526和第二齿条529相啮合,以驱动第一拧紧机518和第二拧紧机519同步地相向或相背移动。
31.通过上述技术方案,本公开第一方面提供的用于轨道交通机车/车辆轴端盖的拆装设备包括第一拧紧机518和第二拧紧机519,第一拧紧机518和第二拧紧机519通过壳体517支撑并安装于承载平台3,这样,在对轨道交通机车/车辆轴端盖上的螺栓进行拆装作业时,第一拧紧机518和第二拧紧机519能够自动地拆装螺栓而无需作业人员手持操作,因而能够降低作业人员的劳动强度低。另外,在进行拆装作业的过程中,通过同步移动机构能够实现第一拧紧机518和第二拧紧机519同步地相向或相背移动,以调整第一拧紧机518和第二拧紧机519之间的间距,适于对位于轨道交通机车/车辆轴端盖的不同直径上的螺栓进行拆装。
32.在本公开中,上述轨道交通机车/车辆在本公开中,上述轨道交通机车/车辆可以是机车、动车组等轨道交通机车/车辆,本公开对此不做具体限制。
33.在本公开提供的具体实施方式中,拆装设备可以包括引导结构,第一齿条526与壳体517之间以及第二齿条529与壳体517之间均设置有引导结构,以引导第一齿条526和第二
齿条529按所设定的轨迹移动,并且实现第一齿条526和第二齿条529分别滑动地连接于壳体517,以减少第一齿条526和第二齿条529与壳体517之间的摩擦阻力。
34.其中,引导结构可以以任意合适的方式构造,例如引导结构可以包括滑槽和连接块,该滑槽设置在壳体517上,连接块滑动地配合在滑槽中,第一齿条526和第二齿条529与各自对应的连接块固定连接。再例如,在本公开提供的具体实施方式中,参考图3和图4中所示,引导结构可以包括滑轨524和滑块525,滑轨524固连于壳体517,滑块525滑动配合在滑轨524上,第一齿条526和第二齿条529与各自对应的滑块525固连,以引导第一齿条526和第二齿条529按所设定的轨迹移动,从而带动第一拧紧机518和第二拧紧机519按所设定的轨迹移动。此外,引导结构还可以以其它合适的方式构造,本公开对此不作具体限制。
35.在本公开提供的具体实施方式中,结合参考图3和图4中所示,滑轨524可以通过安装架523连接于壳体517,其中,滑轨524可以通过焊接或者紧固件(例如螺钉、螺栓等)紧固于安装架523,本公开对此不作具体限制。另外,安装架523也可以通过焊接或者紧固件(例如螺钉、螺栓等)紧固于壳体517,本公开对此也不作具体限制。
36.此外,继续结合参考图3和图4中所示,第一齿条526和第二齿条529可以通过支撑块530与各自对应的滑块525连接,其中,第一拧紧机518和第二拧紧机519分别固定安装在对应的支撑块530上,这样,第一拧紧机518的拧紧轴位于第一齿条526和第一拧紧机518所对应的滑块525之间,第二拧紧机519的拧紧轴位于第二齿条529和第二拧紧机519所对应的滑块525之间,以便于第一拧紧机518和第二拧紧机519的设置,避免干涉。其中,参考图4中所示,第一拧紧机518和第二拧紧机519通过紧固件(例如螺钉、螺栓等)紧固连接于各自对应的支撑块530,支撑块530与滑块525通过紧固件(例如螺钉、螺栓等)固定连接在一起。另外,第一齿条526和第二齿条529可以通过焊接或紧固件(例如螺钉、螺栓等)与各自对应的支撑块530连接,本公开对此不作具体限制。
37.在本公开提供的具体实施方式中,壳体517包括相对设置的第一端部和第二端部,第一齿条526和第二齿条529位于第一端部,驱动电机520固定于第二端部并且驱动电机520的输出端传动连接有传动轴521,传动齿轮522同轴地固定安装于传动轴521,以将驱动电机520的驱动力经传动轴521传递给传动齿轮522,从而驱动第一拧紧机518和第二拧紧机519同步地相向或相背移动。通过这种布置方式,第一拧紧机518和第二拧紧机519安装于壳体517的第一端部,驱动电机520安装于壳体517的第二端部,这样能够防止驱动电机520对第一拧紧机518和第二拧紧机519的移动造成干涉,以为第一拧紧机518和第二拧紧机519提供足够的移动空间。其中,驱动电机520的输出端可以通过联轴器或键连接的方式与传动轴521连接,还可以的是,驱动电机520的输出端通过减速机构与传动轴521连接,以通过减速机构降低驱动电机520所输出的转速并增加转矩,本公开对此不作具体限制。另外,传动齿轮522可以通过键连接的方式与传动轴521同轴地固定在一起,还可以的是,传动齿轮522与传动轴521一体成型,本公开对此也不作具体限制。
38.在本公开提供的具体实施方式中,参考图4中所示,滑块525上可以设置有位置拨杆527,安装架523上可以设置有位移尺528,通过位置拨杆527能够实现对当前第一拧紧机518和第二拧紧机519之间的间距的数值输出,便于作业人员获知当前第一拧紧机518和第二拧紧机519之间的间距。
39.在本公开提供的具体实施方式中,为了便于壳体517与承载平台3之间的连接,拆
装设备可以包括连接机构4,连接机构4绕第一竖直轴线可转动地安装于承载平台3并与壳体517连接,以在作业位置和收纳位置之间切换,在作业位置,壳体517伸出而悬置于承载平台3,即此时第一拧紧机518和第二拧紧机519能够对轨道交通机车/车辆轴端盖上的螺栓进行拆装,如图1中所示;在收纳位置,壳体517收回而放置于承载平台3,即此时第一拧紧机518和第二拧紧机519均处于非工作状态,如图2中所示。其中,承载平台3上可以设置有两个拧紧机托架31,以在壳体517处于收纳位置时,对壳体517提供支撑。另外,本公开提供的拆装设备可以包括控制系统,两个拧紧机托架31中一者可以设置有第二接近开关32,该第二接近开关32与控制系统电连接,以在壳体517靠近拧紧机托架31时发出信号,以便于控制系统感知第一拧紧机518和第二拧紧机519的位置状态,确保在壳体517处于收纳位置时(即第一拧紧机518和第二拧紧机519处于非工作状态)移动拆装设备。
40.此外,由于第一拧紧机518和第二拧紧机519的作业对象是螺栓,其中,螺栓有不同的规格,根据不同规格的螺栓需要在第一拧紧机518和第二拧紧机519的拧紧轴上套上与螺栓相对应的套筒,为了便于作业人员选择所需的套筒,承载平台3上还可以设置有第一套筒选择器33和第二套筒选择器34,不同规格的套筒排放在第一套筒选择器33和第二套筒选择器34上,在作业时,第一套筒选择器33或第二套筒选择器34发出灯光提示,以提示作业人员选择哪一种规格的套筒。
41.参考图1至图2中所示,为了便于作业人员移动拆装设备,可以通过移动车1移动拆装设备,以对轨道交通机车/车辆不同车厢上的轴端盖上的螺栓或者同节车厢上不同位置的轴端盖上的螺栓进行拆装。这样,承载平台3可以是移动车1自身的平台,也可以是独立于移动车1并安装在移动车1上的平台。
42.在本公开提供的具体实施方式中,连接机构4可以以任意合适的方式构造。可选择地,参考图5至图7中所示,连接机构4可以包括第一折臂410和第二折臂411,第一折臂410和第二折臂411绕第二竖直轴线相对于彼此可转动地连接在一起,第一折臂410的端部通过安装座47绕第一竖直轴线可转动地连接于承载平台3,第二折臂411的端部通过拧紧机支座412绕第三竖直轴线可转动地连接于壳体517,这样,通过该连接机构4既能够实现壳体517在作业位置和收纳位置之间切换,也能够实现壳体517靠近或远离待拆装的轨道交通机车/车辆轴端盖,在进行拆装作业时,作业人员可以根据轨道交通机车/车辆轴端盖的位置调整壳体517的位置,以使得第一拧紧机518和第二拧紧机519的拧紧轴对准待拆装的轨道交通机车/车辆轴端盖上的螺栓。
43.在本公开提供的具体实施方式中,拆装设备还可以包括锁止机构,锁止机构包括第一锁止装置413、第二锁止装置414和第三锁止装置415,第一锁止装置413用于锁止第一折臂410与安装座47之间的转动,第二锁止装置414用于锁止第一折臂410与第二折臂411之间的转动,第三锁止装置415用于第二折臂411与拧紧机支座412之间的转动,以保持壳体517的位置,防止第一拧紧机518和第二拧紧机519在进行拆装作业过程中位置发生改变。
44.在本公开提供的具体实施方式中,第一折臂410可以通过任意合适的方式与承载平台3连接。可选择地,参考图5至图7中所示,第一折臂410的第一端部可以构造为套筒状并通过安装座47连接于承载平台3,安装座47上支承有第一安装轴,该第一安装轴的轴线与第一竖直轴线共线并且第一安装轴上套设有第一回转轴承,第一回转轴承的外圈与安装座47固定连接,第一折臂410的第一端部套设于第一安装轴并且与第一回转轴承的内圈固定连
接,由此实现第一折臂410绕第一竖直轴线相对于安装座47转动。其中,第一回转轴承的外圈可以通过紧固件(例如螺钉、螺栓等)与安装座47紧固连接在一起,第一回转轴承的内圈可以通过紧固件(例如螺钉、螺栓等)与第一折臂410的第一端部紧固连接在一起,本公开对此不作具体限制。此外,安装座47可以通过焊接或者紧固件(例如螺钉、螺栓等)连接于承载平台3,这样,安装座47相对于承载平台3固定,在此情况下,在作业人员的操作下,第一回转轴承的内圈相对于第一回转轴承的外圈转动,从而第一折臂410相对于安装座47转动。
45.在本公开提供的具体实施方式中,第一锁止装置413可以以任意合适的方式构造,例如锁紧螺丝,该锁紧螺丝穿设于第一折臂410的第一端部并且与第一折臂410螺纹配合,在需要锁止第一折臂410相对于安装座47的转动时,作业人员手动拧紧锁紧螺丝至锁紧螺丝的末端抵顶于第一回转轴承的内圈,以锁止第一回转轴承的内圈相对于第一回转轴承的外圈的转动,从而锁止第一折臂410相对于安装座47的转动。在图5至图7示出的实施例中,第一锁止装置413安装于第一安装轴并且可以构造为电磁离合器,该电磁离合器的动盘与第一回转轴承的内圈通过紧固件(例如螺钉、螺栓等)连接,该电磁离合器的磁轭与第一回转轴承的外圈通过紧固件(例如螺钉、螺栓等)连接,在电磁离合器处于断电状态时,该电磁离合器的磁轭与动盘吸合,从而锁止第一回转轴承的内圈相对于第一回转轴承的外圈转动,使得第一折臂410相对于安装座47不能够自由转动,在需要第一折臂410转动时,控制电磁离合器通电以使得电磁离合器的磁轭与动盘分离,从而解锁第一折臂410以使得第一折臂410能够在作业人员的操作下相对于安装座47转动。
46.在本公开提供的具体实施方式中,为了便于第一折臂410和第二折臂411的连接,第一折臂410的第二端部可以构造为套筒状并通过连接座417与第二折臂411连接,连接座417上支承有第二安装轴,该第二安装轴的轴线与第二竖直轴线共线并且第二安装轴上套设有第二回转轴承,第二回转轴承的外圈与连接座417固定连接,第一折臂410的第二端部套设于第二安装轴并且与第二回转轴承的内圈固定连接,由此实现第一折臂410和第二折臂411绕第二竖直轴线相对于彼此转动。其中,第二回转轴承的外圈可以通过紧固件(例如螺钉、螺栓等)与连接座417紧固连接在一起,第二回转轴承的内圈可以通过紧固件(例如螺钉、螺栓等)与第一折臂410的第一端部紧固连接在一起,本公开对此不作具体限制。此外,连接座417可以通过焊接或者紧固件(例如螺钉、螺栓等)与第二折臂411固定连接在一起,还可以的是,该连接座417与第二折臂411一体成型,本公开对此也不作具体限制。
47.在本公开提供的具体实施方式中,第二锁止装置414可以以任意合适的方式构造。可选择地,参考图5至图7中所示,第二锁止装置414安装于第二安装轴并且可以构造为电磁离合器,该电磁离合器的动盘与第二回转轴承的内圈通过紧固件(例如螺钉、螺栓等)连接,该电磁离合器的磁轭与第二回转轴承的外圈通过紧固件(例如螺钉、螺栓等)连接,在电磁离合器处于断电状态时,该电磁离合器的磁轭与动盘吸合,从而锁止第二回转轴承的内圈和第二回转轴承的外圈相对于彼此转动,使得第一折臂410和第二折臂411相对于彼此不能够自由转动,在需要第一折臂410和第二折臂411相对于彼此转动时,控制电磁离合器通电以使得该电磁离合器的磁轭与动盘分离,从而解锁第一折臂410和第二折臂411相对于彼此转动,此时第一折臂410和第二折臂411能够在作业人员的操作下相对于彼此转动。
48.在本公开提供的具体实施方式中,为了便于第二折臂411与壳体517的连接,第二折臂411的端部可以构造为套筒状并通过拧紧机支座412与壳体517连接,拧紧机支座412上
支承有第三安装轴,该第三安装轴的轴线与第三竖直轴线共线并且第三安装轴上套设有第三回转轴承,第三回转轴承的外圈与拧紧机支座412固定连接,第二折臂411的端部套设于第三安装轴并且与第三回转轴承的内圈固定连接,由此实现第二折臂411和拧紧机支座412绕第三竖直轴线相对于彼此转动。其中,第三回转轴承的外圈可以通过紧固件(例如螺钉、螺栓等)与拧紧机支座412紧固连接在一起,第三回转轴承的内圈可以通过紧固件(例如螺钉、螺栓等)与第二折臂411的端部紧固连接在一起,本公开对此不作具体限制。此外,拧紧机支座412可以通过焊接或者紧固件(例如螺钉、螺栓等)与壳体517固定连接在一起,还可以的是,拧紧机支座412与壳体517一体成型,本公开对此也不作具体限制。
49.在本公开提供的具体实施方式中,第二锁止装置414可以以任意合适的方式构造。可选择地,参考图5至图7中所示,第三锁止装置415安装于第三安装轴并且可以构造为电磁离合器,该电磁离合器的动盘与第三回转轴承的内圈通过紧固件(例如螺钉、螺栓等)连接,该电磁离合器的磁轭与第三回转轴承的外圈通过紧固件(例如螺钉、螺栓等)连接,在电磁离合器处于断电状态时,该电磁离合器的磁轭与动盘吸合,从而锁止第三回转轴承的内圈和第三回转轴承的外圈相对于彼此转动,使得第二折臂411和拧紧机支座412相对于彼此不能够自由转动,在需要第二折臂411和拧紧机支座412相对于彼此转动时,控制电磁离合器通电以使得该电磁离合器的磁轭与动盘分离,从而解锁第二折臂411和拧紧机支座412相对于彼此转动,此时第二折臂411和拧紧机支座412能够在作业人员的操作下相对于彼此转动。
50.在本公开提供的具体实施方式中,结合参考图5至图7中所示,安装座47、连接座417和拧紧机支座412可以分别设置有限位柱416,以分别限制第一折臂410、第二折臂411和拧紧机支座412的最大转动角度,防止在转动的过程中碰撞到其它部件而导致的损坏。
51.在本公开提供的具体实施方式中,拆装设备还可以包括升降机构,升降机构安装于承载平台3并通过连接机构4连接壳体517,以驱动壳体517沿垂向移动,从而调整第一拧紧机518和第二拧紧机519在垂向上的位置。
52.在本公开提供的具体实施方式中,升降机构可以以任意合适的方式构造。例如,在一种实施方式中,升降机构可以构造为气缸,该气缸的缸体固定于承载平台3,该气缸的伸缩杆沿垂向延伸并且与安装座47固定连接,从而通过连接机构4与壳体517连接,由此实现驱动壳体517沿垂向移动。在另一种实施方式中,升降机构可以包括电机和带传动结构,该电机固定安装在承载平台3上,该带传动结构中的传动带与安装座47固定连接,以通过电机驱动带传动结构中的传动带运转,从而实现驱动壳体517沿垂向移动。
53.在图5和图6所示出的实施方式中,升降机构可以包括旋转电机41和螺杆螺母传动结构,其中,螺杆螺母传动结构中的螺杆45沿垂向延伸,旋转电机41的输出轴传动连接于螺杆螺母传动结构中的螺杆45,安装座47固连于螺杆螺母传动结构中的螺母46,旋转电机41驱动螺杆45转动以使得螺母46在螺杆45上沿垂向移动,从而带动壳体517在垂向上移动。其中,优选地,上述螺杆螺母传动结构中的螺杆45和螺母46分别为t型螺杆和t型螺母,由于t型螺杆和t型螺母承载能力强且具有自锁功能,因此不需要额外增设锁定装置,通过该t型螺杆和t型螺母自身所具备的自锁功能即能够保持壳体517在垂向上的位置,从而确保第一拧紧机518和第二拧紧机519在作业过程中在垂向上的位置固定。
54.在本公开中,旋转电机41的输出轴可以通过联轴器与螺杆45传动连接,也可以通
过其它传动结构与螺杆45传动连接。在图5和图6所示出的具体实施方式中,升降机构还可以包括带传动结构,该带传动结构包括第一带轮43、第二带轮44以及绕设在第一带轮43和第二带轮44上的传动带42,旋转电机41的输出轴沿垂向延伸并与螺杆45相互平行,第一带轮43同轴地固定于旋转电机41的输出轴,第二带轮44同轴地固定于螺杆45,在工作时,旋转电机41驱动第一带轮43转动,经传动带42带动第二带轮44转动以驱动螺杆45转动,使得与螺杆45相配合的螺母46在垂向上移动,从而带动壳体517在垂向上移动。其中,第一带轮43和第二带轮44的直径可以相等,或者,第一带轮43的直径小于第二带轮44的直径,在此情况下,旋转电机41经过带传动结构降低转速并增大转矩,再或者,第一带轮43的直径大于第二带轮44的直径,本公开对此不作具体限制。另外,通过这种布置方式,能够减少拆装设备在垂向上的尺寸,使得本公开所提供的拆装设备结构更加紧凑。
55.在本公开提供的具体实施方式中,拆装设备可以包括安装支架和导向结构,安装支架安装于承载平台3,导向结构可以包括导轨48和导向块49,导轨48沿垂向延伸并固定于安装支架,导向块49滑动配合在导轨48上并与安装座47固连,以引导安装座47在垂向上移动。其中,安装支架可以通过焊接或者紧固件(例如螺钉、螺栓等)固定安装于承载平台3,也可以的是,安装支架与承载平台3一体成型,本公开对此不作具体限制。
56.在本公开提供的具体实施方式中,参考图7中所示,安装支架上可以设置有第一防护罩418,该第一防护罩418罩设在导轨48上并且第一防护罩418的一端固定连接于安装支架,另一端固定连接于安装座47,以对导轨48起到防护作用,同时亦能够对作业人员起到保护作用。
57.在本公开提供的具体实施方式中,参考图9中所示,拆装设备可以包括第一支承座57和位置调节机构,壳体517与第一支承座57连接,拧紧机支座412通过位置调节机构沿壳体517的轴向可移动地安装于第一支承座57,这样,第一支承座57能够带动与其相连接的壳体517一起相对于拧紧机支座412在壳体517的轴向上移动,以使得第一拧紧机518和第二拧紧机519靠近或远离轨道交通机车/车辆轴端盖上的螺栓,并且在进行拆装作业时,使得第一拧紧机518和第二拧紧机519的拧紧轴压紧于待拆装的轴端盖上的螺栓。
58.在本公开提供的具体实施方式中,位置调节机构可以以任意合适的方式构造,例如曲柄滑块525机构。在图9示出的实施方式中,位置调节机构包括引导滑轨54和引导滑块53,第一支承座57与壳体517连接,引导滑轨54固定安装在第一支承座57上并且平行于壳体517的中心轴线延伸,引导滑块53滑动地配合在引导滑轨54上并且与拧紧机支座412固连,从而实现第一支承座57相对于拧紧机支座412在壳体517的轴向上的移动。其中,为了便于作业人员调整壳体517的位置而使得第一拧紧机518和第二拧紧机519的拧紧轴对准待拆装的螺栓,参考图8中所示,壳体517上设置有第一扶手51和第二扶手52,该第一扶手51和第二扶手52分别设置在壳体517的前端部和后端部,以便于作业人员在操作过程中握持。
59.在本公开提供的具体实施方式中,参考图9中所示,第一支承座57上可以设置有第二防护罩55,该第二防护罩55罩设在引导滑轨54上并且第二防护罩55的一端固定连接于第一支承座57,另一端固定连接于拧紧机支座412,以对引导滑轨54起到防护作用,同时亦能够对作业人员起到保护作用。
60.在本公开提供的具体实施方式中,参考图9中所示,引导滑轨54的端部可以设置有限位止挡56,以限制引导滑块53的移动,防止引导滑块53脱离引导滑轨54。
61.在本公开提供的具体实施方式中,拆装设备可以包括第二支承座58,壳体517连接于第二支承座58,第二支承座58沿横向可转动地连接于第一支承座57,由此能够调节第一拧紧机518和第二拧紧机519的拧紧轴的端部与待拆装的螺栓之间的角度,以使得第一拧紧机518和第二拧紧机519不会因为承载平台3所处地面不平而对拆装作业造成影响。
62.在本公开提供的具体实施方式中,参考图10中所示,第二支承座58通过第一旋转轴承59连接于第一支承座57,第一旋转轴承59的内圈与第一支承座57固定连接,第一旋转轴承59的外圈与第二支承座58固定连接,由此实现第二支承座58相对于第一支承座57沿横向转动,以通过第二支承座58带动壳体517运动,从而调整壳体517的前端部和后端部在垂向上的高度,进而适于在不平整的地面进行拆装作业。在壳体517的前端部高于壳体517的后端部时,壳体517处于上仰状态,在壳体517的前端部低于壳体517的后端部时,壳体517处于下俯状态。在此需要说明的是,地面的平整度对本公开的拆装设备的拆装作业影响较小,因而在地面不平整的情况下,第二支承座58相对于第一支承座57在横向上的转动量很小。
63.其中,拆装设备还可以包括转动限位结构,转动限位结构设置在第一支承座57和第二支承座58之间,以锁定第二支承座58相对于第一支承座57的转动,确保第二支承座58在调节后相对于第一支承座57的位置保持不变,从而保持第一拧紧机518和第二拧紧机519的拧紧轴对准待拆装的螺栓。
64.在本公开提供的具体实施方式中,转动限位结构可以以任意合适的方式构造,例如电磁离合器,通过该电磁离合器锁定第一旋转轴承59的内圈和第一旋转轴承59的外圈相对于彼此的转动。在图10和图11所示出的实施方式中,转动限位结构可以包括止挡板、安装块和调节件510,止挡板设置在第一支承座57上,安装块固定设置在第二支承座58上并设置有供调节件510穿过的通孔,调节件510与通孔螺纹配合并且调节件510的末端抵顶于止挡板,通过手动旋拧调节件510以对第二支承座58进行限位,约束第二支承座58相对于第一支承座57的转动。参考图11中所示,转动限位结构的数量为两组,在对第二支承座58进行限位时,两组转动限位结构中的调节件510以不同的方向旋转,即在其中一组转动限位结构中的调节件510从对应的通孔中旋出时,另一组转动限位结构中的调节件510从对应的通孔中旋入,从而实现约束第二支承座58相对于第一支承座57的转动。其中,调节件510可以构造为调节螺丝等任意合适的调节件510,本公开对此不作具体限制。
65.在本公开提供的具体实施方式中,壳体517通过第二旋转轴承513绕壳体517的中心轴线可转动地连接于第二支承座58,第二支承座58上固设有轴承支座,第二旋转轴承513的外圈与轴承支座固定连接,第二旋转轴承513的内圈与壳体517固定连接,由此实现壳体517相对于第二支承座58绕壳体517的中心轴线转动。在轴端盖上的螺栓数量为六个及以上的情况下,通过操作壳体517相对于第二支承座58绕壳体517的中心轴线转动,以能够对轴端盖上的所有螺栓进行拆装。以轴端盖上的螺栓数量为六个的情况为例,任意相邻的两个螺栓之间的相位差为60
°
。在进行第一次拆装作业时,通过第一拧紧机518和第二拧紧机519对第一对螺栓进行拆装作业。在进行第二次拆装作业时,通过同步移动机构驱动第一拧紧机518和第二拧紧机519同步地相向或相背移动,使得第一拧紧机518和第二拧紧机519对第二对螺栓进行拆装作业,第二对螺栓与第一对螺栓相位差60
°
。在进行第三次拆装作业时,通过操作壳体517绕其中心轴线转动60
°
,以使得第一拧紧机518和第二拧紧机519对第三对螺栓进行拆装作业。
66.在本公开提供的具体实施方式中,拆装设备包括旋转限位结构,以锁定壳体517绕中心轴线的转动,以在调整壳体517绕其中心轴线转动的角度后,确保壳体517不会发生意外转动。
67.在本公开提供的具体实施方式中,旋转限位结构可以以任意合适的方式构造,例如电磁离合器,通过该电磁离合器锁定第二旋转轴承513的内圈相对于第二旋转轴承513的外圈的转动。在图9所示出的实施方式中,旋转限位结构可以包括固定座514、锁紧盘516和锁紧件515,固定座514固连于第二支承座58并设置有供锁紧件515穿过的安装孔,锁紧盘516套设在壳体517上并与第二旋转轴承513的内圈固定连接,锁紧件515与安装孔螺纹配合并且锁紧件515的末端抵顶于锁紧盘516,通过手动旋拧锁紧件515以压紧第二旋转轴承513的内圈,使得第二旋转轴承513的内圈相对于第二旋转轴承513的外圈不能够转动,从而约束壳体517绕其中心轴线的转动。
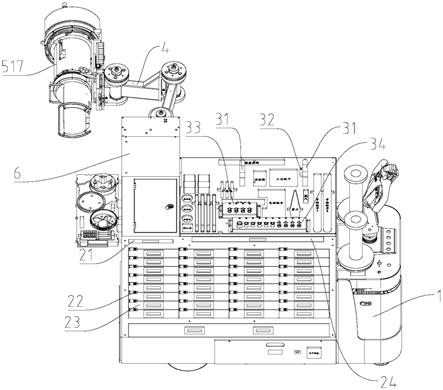
68.在本公开提供的具体实施方式中,拆装设备还包括作业系统6,作业系统6包括第一摄像头61、第二摄像头62、显示装置63和广角摄像头64和存储器65,以对轨道交通机车/车辆检修作业进行全过程、全方位监控,实现检修作业管理的实时性和事后的可追溯性。其中,该作业系统6设置在承载平台3上,参考图2中所示,广角摄像头64和储存器分别固设于承载平台3上,广角摄像头64用于对作业人员的操作进行拍摄,第一摄像头61和第二摄像头62分别固设于壳体517的前端面并用于拍摄在拆装作业中的操作。其中,第一摄像头61和第二摄像头62所拍摄的视频在显示装置63上显示,便于作业人员操作。此外,第一摄像头61、第二摄像头62以及广角摄像头64所拍摄的视频均通过存储器65进行储存。
69.根据本公开第二方面的具体实施方式,参考图12至图14中所示,提供一种智能物料柜2,智能物料柜2包括柜体、多个轴端物料储存抽屉23、旧螺栓储存抽屉24和控制系统,柜体的顶部设置有用于拆装轴端盖的拆装设备,多个轴端物料储存抽屉23和旧螺栓储存抽屉24分别滑动地连接于柜体,多个轴端物料储存抽屉23与轴端盖一一对应,并且每个轴端物料储存抽屉23通过各自对应的第一锁紧装置213可解锁地锁闭于柜体,旧螺栓储存抽屉24通过第二锁紧装置28可解锁地锁闭于柜体,控制系统与第一锁紧装置213电连接,以根据拆装设备的作业流程控制相应的第一锁紧装置213解锁。
70.通过上述技术方案,本公开第二方面提供的智能物料柜2通过轴端物料储存抽屉23和旧螺栓储存抽屉24能够对轴端物料、所拆卸下的旧螺栓以及待安装的新螺栓进行有序地存放,其中,轴端物料储存抽屉23的数量与轨道交通机车/车辆轴端盖的数量相等且一一对应,在当前轴端盖拆卸操作流程未执行结束之前,控制系统控制当前轴端盖所对应的轴端物料储存抽屉23处于解锁状态,其它轴端物料储存抽屉23均处于锁止状态,在控制系统确认当前轴端盖拆卸操作流程执行结束后,控制系统控制当前轴端盖所对应的轴端物料储存抽屉23处于锁止状态,并控制下一轴端盖所对应的轴端物料储存抽屉23打开,从而智能控制抽屉的开合。通过这种设置方式,每个轴端盖上的轴端物料存放在各自对应的轴端物料储存抽屉23中,不会出现不同轴端盖的轴端物料混用的问题。
71.其中,参考图1、图2和图12中所示,智能物料柜2位于移动车1上,本公开的用于轨道交通机车/车辆轴端盖的拆装设备安装在智能物料柜2上,这样,通过移动车1能够带动智能物料柜2和拆装设备移动,以通过拆装设备对轨道交通机车/车辆上的多个轴端盖进行拆装并通过智能物料柜2对零部件进行有序地存放。其中,参考图12中所示,智能物料柜2可以
包括32个轴端物料储存抽屉23,分8层4列布置,轴端物料储存抽屉23的数量与一个标准编组的轨道交通机车/车辆一侧的轴端数量相对应,即8节轨道交通机车/车辆车厢,每节轨道交通机车/车辆车厢的一侧有4个轴端,每个轴端对应有一个轴端盖。另外,参考图12中所示,智能物料柜2还可以包括键盘抽屉21,以用于放置键盘,便于作业人员输入指令。
72.在本公开提供的具体实施方式中,第一锁紧装置213可以以任意合适的方式构造。在一种实施例中,第一锁紧装置213可以构造为电磁铁,控制系统用于控制电磁铁通电或断电,以锁闭或解锁轴端物料储存抽屉23,在电磁铁处于通电状态时,电磁铁具有磁性能够吸附轴端物料储存抽屉23,在电磁铁处于断电状态时,电磁铁不具有磁性而解锁轴端物料储存抽屉23。另一些实施例中,第一锁紧装置213可以构造为电子锁,该电子锁与控制系统通信连接并用于根据控制系统的控制指令锁闭或解锁轴端物料储存抽屉23。此外,第一锁紧装置213还可以构造为任意合适的电子锁紧装置,本公开对此不作具体限制。
73.在本公开提供的具体实施方式中,轴端物料储存抽屉23设置有机械锁212,机械锁212用于在第一锁紧装置213不工作时将轴端物料储存抽屉23可解锁地连接于柜体,在智能物料柜2处于非工作状态时,此时第一锁紧装置213处于断电状态,通过机械锁212将轴端物料储存抽屉23锁闭,以避免在移动车1移动的过程中轴端物料储存抽屉23自行滑出,提高移动车1移动时的安全性。
74.其中,机械锁212可以以任意合适的方式构造。可选择地,机械锁212可以包括相配合的第一卡扣和第一插销,第一卡扣和第一插销中的一者设置于轴端物料储存抽屉23,另一者设置于柜体。在图14所示出的实施例中,第一卡扣固定设置于柜体,第一插销固定设置于轴端物料储存抽屉23。
75.在本公开提供的具体实施方式中,第二锁紧装置28可以以任意合适的方式构造,例如电子锁、电磁铁等电子锁紧装置,还可以的是,第二锁紧装置28构造为机械锁212,本公开对此不作具体限制。在图13所示出的实施例中,第二锁紧装置28构造为机械锁212并可以包括相配合的第二卡扣和第二插销,第二卡扣和第二插销中的一者设置于旧螺栓储存抽屉24,另一者设置于柜体,通过第二锁紧装置28使得旧螺栓储存抽屉24在锁闭状态不容易滑出,能够提高移动车1在移动时的安全性。具体地,第二卡扣固定设置于柜体,第二插销固定设置于旧螺栓储存抽屉24。
76.在本公开提供的具体实施方式中,每个轴端物料储存抽屉23可拆卸地设置有物料托盘29和新螺栓托盘210,新螺栓托盘210可拆卸地安装于物料托盘29,即新螺栓托盘210与物料托盘29为分体设计,新螺栓托盘210安放在物料托盘29上,在作业过程中,取出物料托盘29时能够将新螺栓托盘210一并取出,在作业前准备新螺栓时,可以将新螺栓托盘210从物料托盘29上取下,便于作业人员作业。另外,物料托盘29可以依据不同型号的轨道交通机车/车辆的物料进行更换。
77.在本公开提供的具体实施方式中,物料托盘29上设置有取放扣手211,以便于取放物料托盘29,在作业过程中,取出物料托盘29的同时其上所放置的新螺栓托盘210和所存放的物料一并被取出。其中,所存放的物料包括轴端盖、测速齿轮等。
78.在本公开提供的具体实施方式中,轴端物料储存抽屉23可以设置有指示灯22,该指示灯22与第一锁紧装置213通过控制系统联控,以显示轴端物料储存抽屉23的状态。例如,该指示灯22能够显示红色和绿色两种颜色,在指示灯22显示为红色时,代表此时轴端物
料储存抽屉23处于锁闭状态,在指示灯22显示为绿色时,代表此时轴端物料储存抽屉23处于解锁状态,其中,指示灯22所显示的颜色由控制系统依据作业流程发出。第一锁紧装置213在指示灯22显示为绿色时解锁轴端物料储存抽屉23,此时作业人员可以手动拉开轴端物料储存抽屉23。
79.在本公开提供的具体实施方式中,参考图13中所示,旧螺栓储存抽屉24可拆卸地设置有旧螺栓托架,旧螺栓托架可以包括第一托架25和第二托架26,第一托架25和第二托架26分别可拆卸地连接于旧螺栓储存抽屉24的本体,以方便作业人员在作业完成后将旧螺栓移出处理。另外,配合不同的规格的托架能够兼容不同的作业车辆型号。为了便于作业人员搬动第一托架25和第二托架26,第一托架25与旧螺栓储存抽屉24的本体之间、第二托架26与旧螺栓储存抽屉24的本体之间以及第一托架25和第二托架26之间可以设置有搬放扣手27,以便于作业人员握持。此外,作业过程中拆卸下来的旧螺栓,可以按照第一托架25和第二托架26的凹模形状进行方式,作业完成时可以方便检查拆卸下来的旧螺栓的规格和数量。
80.在本公开提供的具体实施方式中,柜体上设置有多个第一接近开关214,多个第一接近开关214与多个轴端物料储存抽屉23一一对应并与控制系统电连接,该第一接近开关214用于感应轴端物料储存抽屉23,以确认轴端物料储存抽屉23处于锁定状态还是解锁状态。
81.根据本公开第三方面的具体实施方式,提供一种用于轨道交通机车/车辆轴端盖的拆装系统,智能物料柜2、拆装设备和扭力校验装置,拆装设备设置在智能物料柜2上,扭力校验装置用于校验拆装设备所输出的扭力,并对拆装设备进行授权使用。
82.其中,参考图15和图16中所示,扭力校验装置包括扭力校验壁挂端71、扭力校验桌面显示、第一扭力传感器74和第二扭力传感器75。
83.其中,扭力校验壁挂端71以壁挂方式竖装,用于接收本公开第二方面提供的用于轨道交通机车/车辆轴端盖的拆装设备中的第一拧紧机518和第二拧紧机519的输出端的转矩输出并测量其扭力,并且将数据通过线缆传递至扭力校验桌面显示。
84.其中,扭力校验桌面显示在桌面存放,用于接收扭力校验壁挂端71测量出的扭力数据。扭力校验桌面显示由触摸显示工控一体机73、内部的电源、无线数据收装发装置组成。
85.其中,扭力校验桌面显示在通过其内部的无线数据收发装置收到拆装设备发送的测量值数据后,即对第一扭力传感器74和第二扭力传感器75进行数据采样,如采样结果符合拆装设备发来的目标值时,即在触摸显示工控一体机73显示测量值并判断其测量结果。同时,将测量是否合格的结果返回拆装设备,并对其进行设备有效性确认,规定拆装设备在自此次校验后的预定时长内设备允许从事扭力方面的工作。同时,与拆装设备进行时间同步。
86.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
87.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可
能的组合方式不再另行说明。
88.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1