可拆卸式铝管第七轴机器人的制作方法
1.本实用新型涉及第七轴机器人技术领域,特别是可拆卸式铝管第七轴机器人。
背景技术:
2.由于目前的第七轴机器人在使用时通常是安装在地轨上使用,但是地轨通常是采用铁管或者不锈钢管制成,质量较大,不便于人们进行组装搬运,并且在使用过程中,第七轴机器人无法独立行走,如果需要转移地方使用时,通常只能重新安装,成本也比较大,不便于人们长久进行使用;
3.鉴于上述情况,有必要对现有的第七轴机器人使用情况加以改进,使其能够适应现在对第七轴机器人使用及拆卸的需要。
技术实现要素:
4.由于目前在使用的第七轴机器人拆卸不便,并且配套使用的地轨比较笨重,成本也比较高,不能满足人们日益增长的需要,因此我们在现有技术缺陷的基础上设计了一种可拆卸式铝管第七轴机器人,使用效果好,并且采用材质比较轻便的铝材,拆卸方便,并且第七轴机器人可以在地面上移动,便于企业推广使用。
5.实现上述目的本实用新型的技术方案为,可拆卸式铝管第七轴机器人,包括第七轴机器人、设置于第七轴机器人下方的地轨;所述地轨上两侧设有第一滑轨,所述第七轴机器人下方两侧设有第一滑块,所述地轨采用铝材制成,工作时,第一滑块滑动安装于第一滑轨上。
6.对本技术方案的进一步补充,所述第七轴机器人正下方还安装有移动机构。
7.对本技术方案的进一步补充,所述移动机构包括减速电机、设置于减速电机下方的啮合齿轮、设置于啮合齿轮一侧的齿条,所述减速电机安装于第七轴机器人下方,所述齿条安装于两侧的地轨之间,所述啮合齿轮与齿条啮合。
8.对本技术方案的进一步补充,所述减速电机上方还安装有滑动机构使得减速电机能够通过滑动机构在第七轴机器人下方左右两侧滑动,所述滑动机构包括设置于第七轴机器人底部的第二滑轨、安装于第二滑块上的第二滑块,所述第二滑轨固定安装于第七轴机器人底部。
9.对本技术方案的进一步补充,所述滑动机构位于减速电机靠近齿条一侧还设有压紧机构,所述压紧机构包括设置于减速电机一侧的固定座、设置于固定座上的锁紧块、设置于固定座一侧的连接块、设置于连接块下方的顶靠块;所述固定座固定安装于减速电机靠近齿条的侧面,所述锁紧块固定安装于固定座上,所述连接块与固定座之间通过橡胶块连接,所述连接块上设有固定块用于与锁紧块配合锁紧。
10.对本技术方案的进一步补充,所述地轨的端部均设有配重块。
11.对本技术方案的进一步补充,所述地轨采用分段式拼接而成,其长度根据需要设置。
12.对本技术方案的进一步补充,所述第七轴机器人下方四周位于地轨的外侧设有移动轮。
13.对本技术方案的进一步补充,所述第七轴机器人上与移动轮连接处还设有千斤顶用于控制移动轮的升降。
14.对本技术方案的进一步补充,所述第七轴机器人上位于移动轮的下方还设有底板,所述底板固定安装于第七轴机器人上。
15.其有益效果在于,能够减少企业的支出成本,并且地轨采用分段式拼接而成,拆卸组装方便,并且能够根据人们的使用需求设置长度,适应性强;并且第七轴机器人既可以在地轨上移动工作,也可以分开独自在地面上移动,适应性更强。
附图说明
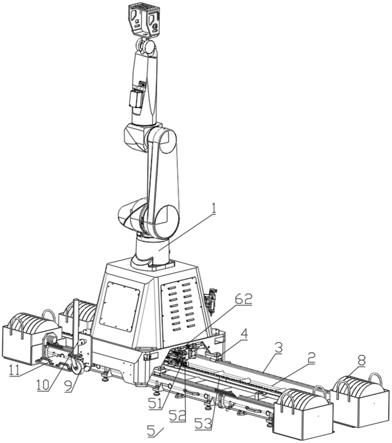
16.图1是本实用新型的第一角度整体结构示意图;
17.图2是本实用新型的第二角度整体结构示意图;
18.图3是图2中a的局部放大图;
19.图中,1、第七轴机器人;2、地轨;3、第一滑轨;4、第一滑块;5、移动机构;51、减速电机;52、啮合齿轮;53、齿条;6、滑动机构;61、第二滑轨;62、第二滑块;7、压紧机构;71、固定座;72、锁紧块;73、连接块;74、顶靠块;75、橡胶块;76、固定块;8、配重块;9、移动轮;10、千斤顶;11、底板。
具体实施方式
20.由于目前在使用的第七轴机器人拆卸不便,并且配套使用的地轨比较笨重,成本也比较高,不能满足人们日益增长的需要,因此我们在现有技术缺陷的基础上设计了一种可拆卸式铝管第七轴机器人,使用效果好,并且采用材质比较轻便的铝材,拆卸方便,并且第七轴机器人可以在地面上移动,便于企业推广使用。
21.为了便于本领域技术人员对本技术方案更加清楚,下面将结合附图1-3详细阐述本实用新型的技术方案:可拆卸式铝管第七轴机器人,包括第七轴机器人1、设置于第七轴机器人1下方的地轨2;所述地轨2上两侧设有第一滑轨3,所述第七轴机器人1下方两侧设有第一滑块4,所述地轨2采用铝材制成,重量轻便,并且成本低,工作时,第一滑块4滑动安装于第一滑轨3上,即第七轴机器人1能够通过第一滑块4在第一滑轨3上稳定地移动,其中,为了保证第七轴机器人1在第一滑轨3上移动时不会发生侧翻的情况,所述地轨2的端部均设有配重块8,用于固定地轨2,保证第七轴机器人1稳定地移动;其中,为了更好地拆装本装置,所述地轨2采用分段式拼接而成,其长度根据需要设置,能够根据人们的使用需求增加或减少地轨2的长度,适应性更强,便于人们进行使用。
22.其中,为了使用第七轴机器人1在第一滑轨3上能够实现自动行走,所述第七轴机器人1正下方还安装有移动机构5,其中移动机构5包括减速电机51、设置于减速电机51下方的啮合齿轮52、设置于啮合齿轮52一侧的齿条53,所述减速电机51安装于第七轴机器人1下方,所述齿条53安装于两侧的地轨2之间,所述啮合齿轮52与齿条53啮合,减速电机51能够控制啮合齿轮52旋转,由于齿条53与啮合齿轮52是啮合的,因此啮合齿轮52能够在齿条53上移动,进而带动第七轴机器人1在地轨2上移动,其中第一滑块4、第一滑轨3的设置能够保
证第七轴机器人1移动更稳定,不会偏移。
23.为了方便拆卸,所述减速电机51上方还安装有滑动机构6使得减速电机51能够通过滑动机构6在第七轴机器人1下方左右两侧滑动,滑动机构6的设置主要是用于控制啮合齿轮52与齿条53之间的距离,需要工作时使得啮合齿轮52与齿条53啮合,当将第七轴机器人1拆卸下来的时候,使得啮合齿轮52远离齿条53,下面将对滑动机构6的结构做详细地阐述,其包括设置于第七轴机器人1底部的第二滑轨61、安装于第二滑块62上的第二滑块62,所述第二滑轨61固定安装于第七轴机器人1底部,即减速机能够通过第二滑块62能够在第二滑轨61上移动,进而实现啮合齿轮52与齿条53之间的距离与啮合状态。
24.进一步地,待需要齿条53与啮合齿轮52啮合工作时,为了防止啮合齿轮52在移动过程中由于力的作用使得啮合齿轮52与齿条53之间偏离,滑动机构6位于减速电机51靠近齿条53一侧还设有压紧机构7,压紧机构7包括设置于减速电机51一侧的固定座71、设置于固定座71上的锁紧块72、设置于固定座71一侧的连接块73、设置于连接块73下方的顶靠块74;所述固定座71固定安装于减速电机51靠近齿条53的侧面,所述锁紧块72固定安装于固定座71上,所述连接块73与固定座71之间通过橡胶块75连接,所述连接块73上设有固定块76用于与锁紧块72配合锁紧;待需要固定时,首先控制顶靠块74紧紧顶靠在齿条53上,然后控制锁紧块72使其与连接块73上的固定块76固定,然后控制啮合齿轮52工作,待需要拆装时,松开锁紧块72使其与固定块76脱离即可,操作方便,便于人们进行使用。
25.其中本技术方案还包括第七轴机器人1的另外一种使用状态,所述第七轴机器人1下方四周位于地轨2的外侧设有移动轮9,能够在地面上行走,其中所述第七轴机器人1上与移动轮9连接处还设有千斤顶10用于控制移动轮9的升降,即在地轨2上时,千斤顶10将移动轮9升起使其不影响第七轴机器人1在第一滑轨3上移动,待将第七轴机器人1从地轨2上拆下时,控制千斤顶10使得移动轮9落在地面上,能够在地面上行走;其中为了更好地保护移动轮9,所述第七轴机器人1上位于移动轮9的下方还设有底板11,所述底板11固定安装于第七轴机器人1上,工作时,移动轮9在底板11上移动,底板11对移动轮9起到支撑的作用。
26.上述技术方案仅体现了本实用新型技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本实用新型的原理,属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1