门锁的制作方法
1.本技术属于门锁技术领域,尤其涉及一种门锁。
背景技术:
2.随着科技的发展,门锁逐渐智能化,并采用指纹或者密码实现启闭,现有的智能门锁有两种开启方式,一种是机械手动按压开启方式,一种是全自动开启方式,其中全自动开启方式分为全自动锁体开启方式和背包电机开启方式。
3.在背包电机开启方式中,背包电机主要安装在内锁对应锁体锁芯位置上,在背包电机处于突然断电失效的情况中,背包电机的第一齿轮箱结构无法通过手动直接开启,导致门锁无法通过手动直接开启,不便于在紧急情况进行逃生。
技术实现要素:
4.本技术实施例提供一种门锁,以解决现有的门锁无法通过手动直接开启的问题。
5.第一方面,本技术实施例提供一种门锁,包括:外壳;门锁主体,容纳于外壳;门锁主体可旋转地连接外壳;开启组件,连接门锁主体,并带动门锁主体旋转,以调整门锁主体相对于待锁物的锁合状态。
6.可选的,开启组件包括把手,把手连接门锁主体的端部,并带动门锁主体旋转。
7.可选的,开启组件还包括电机和传动机构;传动机构的一端连接电机,另一端套接门锁主体,并带动门锁主体旋转。
8.可选的,传动机构设有第一齿轮,第一齿轮套接门锁主体,并与门锁主体之间具有旋转余量。
9.可选的,门锁主体的一侧凸设有第一凸台;第一齿轮朝向门锁主体的一侧凸设有第二凸台,第二凸台和第一凸台处于同一水平面,第二凸台和第一凸台之间具有周向间隙。
10.可选的,第二凸台和第一凸台之间具有45
°
的周向间隙。
11.可选的,传动机构包括多个第二齿轮,多个第二齿轮相啮合,并与第一齿轮啮合,以带动第一齿轮旋转。
12.可选的,把手和传动机构分别连接门锁主体,并处于门锁主体的不同侧。
13.可选的,门锁主体和外壳之间具有弹性件,弹性件套接于门锁主体,并与门锁主体弹性抵接,以带动门锁主体弹性复位。
14.可选的,弹性件为扭簧;门锁主体设有两第三凸台,扭簧的两端分别弹性抵接两第三凸台。
15.本技术的一个实施例提供的门锁,通过开启组件连接门锁主体,并带动门锁主体旋转,以调整门锁主体相对于待锁物的锁合状态,从而实现门锁主体同时具备手动解锁和电动解锁的功能,避免因为电动解锁的故障而无法解锁,以便于在紧急情况中对门锁主体进行手动解锁,提高门锁的安全性。
附图说明
16.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单的介绍。显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对本领域技术人员来说,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.为了更完整地理解本技术及其有益效果,下面将结合附图来进行说明。其中,在下面的描述中相同的附图标号表示相同部分。
18.图1为本技术实施例提供的门锁的示意图。
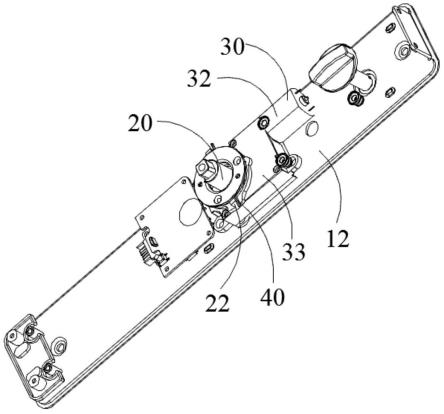
19.图2为本技术实施例提供的门锁的部分示意图。
20.图3为本技术实施例提供的门锁的开启组件的示意图。
21.图4为本技术实施例提供的门锁的开启组件的俯视图。
具体实施方式
22.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
23.随着科技的发展,门锁逐渐智能化,并采用指纹或者密码实现启闭,现有的智能门锁有两种开启方式,一种是机械手动按压开启方式,一种是全自动开启方式,其中全自动开启方式分为全自动锁体开启方式和背包电机开启方式。
24.在背包电机开启方式中,背包电机主要安装在内锁对应锁体锁芯位置上,在背包电机处于突然断电失效的情况中,背包电机的第一齿轮箱结构无法通过手动直接开启,导致门锁无法通过手动直接开启,不便于在紧急情况进行逃生。
25.本技术实施例提供一种门锁100,以解决现有的门锁100无法通过手动直接开启的问题。
26.本技术实施例提供的门锁100,示例性的,请参阅图1至图4,图1为本技术实施例提供的门锁100的示意图。图2为本技术实施例提供的门锁100的部分示意图。图3为本技术实施例提供的门锁100的开启组件30的示意图。图4为本技术实施例提供的门锁100的开启组件30俯视图。
27.门锁100应用于对待锁物的锁合或解开,待锁物可以为门体、窗体,此处不做限制。门锁100可以采用指纹或者密码实现启闭,从而实现对待锁物的锁合或解锁。
28.门锁100包括外壳10、门锁主体20和开启组件30,门锁主体20和开启组件30均容纳于外壳10内,并受到外壳10的外层保护。
29.外壳10可以有第一壳体11和第二壳体12围合形成,第一壳体11和第二壳体12之间形成有容纳槽,通过容纳槽容纳门锁主体20和开启组件30。
30.门锁主体20容纳于外壳10;门锁主体20可旋转地连接外壳10,并相对于外壳10旋转,以切换门锁主体20的锁合状态或解锁状态。
31.可选的,门锁主体20呈圆轴状,门锁主体20朝向待锁物的一端设有方孔,通过方孔连接待锁物。
32.请参阅图1至图4,开启组件30连接门锁主体20,并在手动模式或者电动模式带动
门锁主体20旋转,以调整门锁主体20相对于待锁物的锁合状态,从而实现门锁主体20同时具备手动解锁和电动解锁的功能,避免因为电动解锁的故障而无法解锁,以便于在紧急情况中对门锁主体20进行手动解锁,提高门锁100的安全性。
33.开启组件30包括把手31,把手31设置于外壳10的外侧,并供操作人员把握和操作。把手31连接门锁主体20的端部,并带动门锁主体20旋转,从而调整门锁主体20的锁合状态或解锁状态,以便于实现门锁主体20的人为锁合或解锁。
34.开启组件30还包括电机32和传动机构33;传动机构33的一端连接电机32,另一端套接门锁主体20,并带动门锁主体20旋转,从而通过电机32和传动机构33实现门锁主体20的电动旋转,以便于实现门锁主体20的电动锁合或解锁。另外,电机32和传动机构33、把手31共同作用门锁主体20,从而实现门锁主体20同时具备手动解锁和电动解锁的功能,避免因为电动解锁的故障而无法解锁,以便于在紧急情况中对门锁主体20进行手动解锁,提高门锁100的安全性。可选的,电机32可以为伺服电机、步进电机或减速电机,此处不做限制。
35.其中,传动机构33设有第一齿轮331,第一齿轮331套接门锁主体20,并与门锁主体20之间具有旋转余量,电机32经传动机构33带动第一齿轮331的旋转,从而实现第一齿轮331在旋转余量中进行空转,并且留有给把手31的手动式解锁的旋转空间,从而实现门锁主体20在电动解锁下的手动解锁。
36.门锁主体20的一侧凸设有第一凸台21;第一齿轮331朝向门锁主体20的一侧凸设有第二凸台3311,第二凸台3311和第一凸台21处于同一水平面,第二凸台3311和第一凸台21之间具有周向间隙3312,通过周向间隙3312实现把手31相对于第一齿轮331的空转,把手31可以自由带动门锁主体20开启,第一凸台21与第二凸台3311之间具有周向间隙3312,第一齿轮331在转动时需要旋转角度,使得第二凸台3311卡合第一凸台21,以便于带动第一凸台21旋转,从而实现门锁主体20的锁合或解锁。可选的,第二凸台3311和第一凸台21之间具有45
°
的周向间隙3312,此处不做限制。
37.另外,传动机构33包括多个第二齿轮332,多个第二齿轮332相啮合,并与第一齿轮331啮合,以带动第一齿轮331旋转,以便于实现对第一齿轮331的减速调整,多个第二齿轮332可以根据不同的减速比实现调整,传动机构33根据不同需求可以设计不同齿比及数量。
38.其中,把手31和传动机构33分别连接门锁主体20,并处于门锁主体20的不同侧,以便于把手31和电机32相对于门锁主体20布置,避免电机32相对于锁芯布置,降低门锁主体20的解锁的旋转圈数。
39.门锁主体20和外壳10之间具有弹性件40,弹性件40套接于门锁主体20,并与门锁主体20弹性抵接,以带动门锁主体20弹性复位,从而实现门锁主体20在无负载情况下的主动复位或旋转助力。
40.其中,弹性件40为扭簧;门锁主体20设有两第三凸台22,扭簧的两端分别弹性抵接两第三凸台22,扭簧通过自身的回弹力带动门锁主体20的自动复位或旋转助力。
41.本技术的一个实施例提供的门锁100,通过开启组件30连接门锁主体20,并带动门锁主体20旋转,以调整门锁主体20相对于待锁物的锁合状态,从而实现门锁主体20同时具备手动解锁和电动解锁的功能,避免因为电动解锁的故障而无法解锁,以便于在紧急情况中对门锁主体20进行手动解锁,提高门锁100的安全性。
42.在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部
分,可以参见其他实施例的相关描述。
43.在本技术的描述中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个特征。
44.以上对本技术实施例所提供的门锁进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本技术的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1