手持式割管机的制作方法
1.本实用新型属于割管机技术领域,尤其是涉及一种手持式割管机。
背景技术:
2.传统割管机和切割机通常具有较大的结构,通过电机带动转架同步带动刀片对管道进行切割,而当需要对带有塑料管或金属网的塑料管进行切割时,且需要对线路进行抢修时,大型割管机占用空间较大,且移动不变,在对塑料管进行切割抢修时费时费力,影响抢修效率。
技术实现要素:
3.本实用新型是为了克服上述现有技术中的缺陷,提供一种单手操作,小巧便捷,具有夹持功能的手持式割管机。
4.为了达到以上目的,本实用新型所采用的技术方案是:手持式割管机,包括相连接的夹持组件和切割组件,切割组件转动连接于夹持组件上;所述夹持组件包括转动连接的第一夹持臂和第二夹持臂,第一夹持臂和第二夹持臂之间设有带动第一夹持臂和第二夹持臂转动的控制元件;所述夹持组件上设有扇形片,扇形片圆心处设有与切割组件相连接的转动轴,且扇形片上形成有环绕圆心处设置的扇形槽;所述切割组件包括壳体、电机和刀片,壳体端部与转动轴相连,且壳体上形成有与扇形槽相适配的滑块,刀片固定连接于电机的电机轴上。
5.作为本实用新型的一种优选方案,所述第一夹持臂和第二夹持臂均为弧形结构,且第一夹持臂的弧形结构开口方向朝向第二夹持臂设置,同理第二夹持臂的弧形结构开口方向朝向第一夹持臂设置。
6.作为本实用新型的一种优选方案,所述控制元件包括中空的固定座,固定座上设有固定片,固定片两端分别与第一夹持臂和第二夹持臂端部铰接。
7.作为本实用新型的一种优选方案,所述固定座内设有与固定座螺纹连接的螺杆,螺杆两端分别设有伸缩块和转动把手,伸缩块位于第一夹持臂和第二夹持臂的弧形结构内。
8.作为本实用新型的一种优选方案,所述扇形片固定连接于固定座上,且扇形片与螺杆平行设置。
9.作为本实用新型的一种优选方案,所述伸缩块两端设有铰接的第一连接片和第二连接片,第一连接片与第一夹持臂中部铰接,第二连接片与第二夹持臂中部铰接。
10.作为本实用新型的一种优选方案,所述伸缩块外侧为弧形结构。
11.作为本实用新型的一种优选方案,所述第一夹持臂和第二夹持臂一端与固定片铰接,第一夹持臂和第二夹持臂另一端上设有转动连接的滚筒。
12.作为本实用新型的一种优选方案,所述壳体上设有交叉设置的第一定位片和第二定位片,第一定位片和第二定位片的位置与刀片位置相对应。
13.作为本实用新型的一种优选方案,所述壳体上设有与电机电性连接的控制按钮,第一夹持臂和第二夹持臂上分别形成有第一抓环和第二抓环。
14.本实用新型的有益效果是,与现有技术相比:通过夹持组件和切割组件的设置,可实现先对管道进行夹持后,通过切割组件在夹持组件上的移动对管道进行切割,确保管道在切割过程中的稳定性,通过可手动控制切割量,实现单手操作用下对塑料管或带金属网的塑料管的有效切割,方便携带和操作,便于对管道的抢修。
附图说明
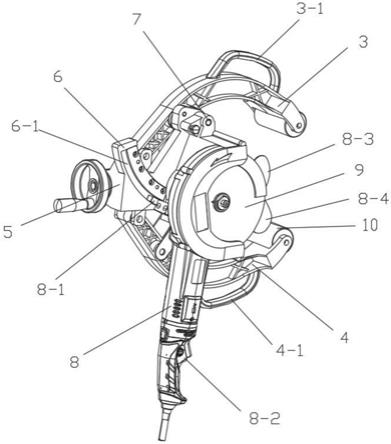
15.图1是本实用新型的结构示意图;
16.图2是本实用新型的主视图;
17.图3是本实用新型的后视图;
18.图中附图标记:夹持组件1,切割组件2,第一夹持臂3,第一抓环3-1,第二夹持臂4,第二抓环4-1,控制元件5,固定座5-1,螺杆5-2,转动把手5-3,伸缩块5-4,固定片5-5,第一连接片5-6,第二连接片5-7,扇形片6,扇形槽6-1,转动轴7,壳体8,滑块8-1,控制按钮8-2,第一定位片8-3,第二定位片8-4,刀片9,滚筒10。
具体实施方式
19.下面结合附图对本实用新型实施例作详细说明。
20.如图1-3所示,手持式割管机,包括相连接的夹持组件1和切割组件2,切割组件2转动连接于夹持组件1上;所述夹持组件1包括转动连接的第一夹持臂3和第二夹持臂4,第一夹持臂3和第二夹持臂4之间设有带动第一夹持臂3和第二夹持臂4转动的控制元件5;所述夹持组件1上设有扇形片6,扇形片6圆心处设有与切割组件2相连接的转动轴7,且扇形片6上形成有环绕圆心处设置的扇形槽6-1;所述切割组件2包括壳体8、电机和刀片9,壳体8端部与转动轴7相连,且壳体8上形成有与扇形槽6-1相适配的滑块8-1,刀片9固定连接于电机的电机轴上,刀片9在电机的作用下进行转动,实现切割作业。
21.夹持组件1对管道进行夹持,切割组件2对夹持后的管道进行切割,控制元件5通过调节第一夹持臂3和第二夹持臂4之间的间距实现与管道的夹持或松开,而切割组件2以转动轴7为圆心,扇形槽6-1的长度为旋转角度进行转动,从而实现切割组件2在夹持组件1在夹持过程中不干涉,并在夹持完成后移动,可根据实际需要调整切割深度。
22.第一夹持臂3和第二夹持臂4均为弧形结构,且第一夹持臂3的弧形结构开口方向朝向第二夹持臂4设置,同理第二夹持臂4的弧形结构开口方向朝向第一夹持臂3设置。
23.第一夹持臂3和第二夹持臂4均为半圆弧结构,第一夹持臂3和第二夹持臂4的尺寸根据管道的尺寸进行设置,当第一夹持臂3和第二夹持臂4处于夹持状态时,第一夹持臂3和第二夹持臂4的内壁与管道的外壁相接触。
24.控制元件5包括中空的固定座5-1,固定座5-1上设有固定片5-5,固定片5-5两端分别与第一夹持臂3和第二夹持臂4端部铰接,第一夹持臂3和第二夹持臂4连接于固定座5-1的上下两侧,且第一夹持臂3和第二夹持臂4不与固定座5-1相接触,固定片5-5沿固定座5-1的宽度方向进行设置。
25.固定座5-1内设有与固定座5-1螺纹连接的螺杆5-2,螺杆5-2两端分别设有伸缩块
5-4和转动把手5-3,伸缩块5-4位于第一夹持臂3和第二夹持臂4的弧形结构内,螺杆5-2沿固定座5-1的长度方向进行设置,且螺杆5-2与固定片5-5垂直设置,转动把手5-3与螺杆5-2同步转动。
26.扇形片6固定连接于固定座5-1上,且扇形片6与螺杆5-2平行设置,扇形片6通过螺栓固定连接于固定座5-1上,扇形片6与螺杆5-2平行设置,确保在管道被夹持后,通过切割组件2的转动稳定对管道进行切割。
27.伸缩块5-4两端设有铰接的第一连接片5-6和第二连接片5-7,第一连接片5-6与第一夹持臂3中部铰接,第二连接片5-7与第二夹持臂4中部铰接。
28.在实际使用过程中,通过旋转转动把手5-3实现螺杆5-2在固定座5-1内的转动,从而实现螺杆5-2在固定座5-1上的移动,当螺杆5-2向内移动时,此时伸缩块5-4向内推送,从而同步带动第一连接片5-6和第二连接片5-7靠近固定座5-1移动,实现第一夹持臂3和第二夹持臂4的夹持。
29.同理当螺杆5-2向外移动时,此时伸缩块5-4向外推送,从而同步带动第一连接片5-6和第二连接片5-7向外移动,实现第一夹持臂3和第二夹持臂4的松开。
30.伸缩块5-4套接于螺杆5-2端部,螺杆5-2在转动过程中,伸缩块5-4不随之转动,伸缩块5-4外侧为弧形结构,弧形结构的伸缩块5-4外侧用于和管道外壁相适配。
31.第一夹持臂3和第二夹持臂4一端与固定片5-5铰接,第一夹持臂3和第二夹持臂4另一端上设有转动连接的滚筒10,滚筒10为橡胶材质,当第一夹持臂3和第二夹持臂4转动到一定位置后,第一夹持臂3和第二夹持臂4上的滚筒10相接触,实现第一夹持臂3和第二夹持臂4的最小夹持位置。
32.壳体8上设有交叉设置的第一定位片8-3和第二定位片8-4,第一定位片8-3和第二定位片8-4的位置与刀片9位置相对应,第一定位片8-3和第二定位片8-4可起到一定的挡屑作用。
33.壳体8上设有与电机电性连接的控制按钮8-2,第一夹持臂3和第二夹持臂4上分别形成有第一抓环3-1和第二抓环4-1,控制按钮8-2与电机通过导线相连,可实现对刀片9的控制,第一抓环3-1和第二抓环4-1可实现手动拉开第一夹持臂3和第二夹持臂4。
34.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现;因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
35.尽管本文较多地使用了图中附图标记:夹持组件1,切割组件2,第一夹持臂3,第一抓环3-1,第二夹持臂4,第二抓环4-1,控制元件5,固定座5-1,螺杆5-2,转动把手5-3,伸缩块5-4,固定片5-5,第一连接片5-6,第二连接片5-7,扇形片6,扇形槽6-1,转动轴7,壳体8,滑块8-1,控制按钮8-2,第一定位片8-3,第二定位片8-4,刀片9,滚筒10等术语,但并不排除使用其它术语的可能性;使用这些术语仅仅是为了更方便地描述和解释本实用新型的本质;把它们解释成任何一种附加的限制都是与本实用新型精神相违背的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1