一种具有自清洁功能巡检机器人的制作方法
1.本实用新型涉及巡检机器人技术领域,尤其涉及一种具有自清洁功能巡检机器人。
背景技术:
2.巡线机器人是以移动机器人作为载体,以可见光摄像机或其它检测仪器作为载荷系统,以机器视觉—电磁场—gps——gis的多场信息融合作为机器人自主移动与自主巡检的导航系统,以嵌入式计算机作为控制系统的软硬件开发平台;具有障碍物检测识别与定位、自主作业规划、自主越障、对输电线路及其线路走廊自主巡检、巡检图像和数据的机器人本体自动存储与远程无线传输、地面远程无线监控与遥控、电能在线实时补给、后台巡检作业管理与分析诊断等功能。
3.现有的巡检机器人,一般单一的具备图像采集,其巡检的效果较差,在进行巡检时,无法根据具体的环境调节探头的位置,故而导致其巡检效果较差,故而满足不了使用者的需求。
技术实现要素:
4.本实用新型的目的在于提供一种具有自清洁功能巡检机器人,以解决上述背景技术中提出的问题。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种具有自清洁功能巡检机器人,包括导轨、行走机构和巡检装置本体,所述导轨内设置有行走机构,所述行走机构的底部设置有安装座,所述安装座下表面中心处转动连接有转轴,所述转轴的底端焊接有倒凹型架,所述倒凹型架内通过旋转轴转动连接有巡检装置本体,所述倒凹型架外壁上固接有带动旋转轴转动的第三驱动电机;
6.所述巡检装置本体前表面嵌设安装有摄像头、红外热成像仪,所述巡检装置本体内部安装有蓄电池、plc控制器和无线连接器,所述巡检装置本体下表面安装有空气检测器。
7.作为上述技术方案的进一步描述:
8.所述行走机构包括设置在导轨内的滑动座和焊接在滑动座下表面中心处的连接座,所述安装座焊接在连接座的底端,所述滑动座下表面位于连接座的两侧螺栓固定有滚轮,所述滚轮上安装有带动第一驱动电机。
9.作为上述技术方案的进一步描述:
10.所述转轴上焊接有从动齿轮,所述安装座下表面嵌设安装有第二驱动电机,所述第二驱动电机的输出轴上固接有主动齿轮,所述主动齿轮与从动齿轮齿轮啮合连接。
11.作为上述技术方案的进一步描述:
12.所述倒凹型架前表面中心处嵌设安装有红外测距仪,所述红外测距仪的输出端与plc控制器的输入端电连接。
13.作为上述技术方案的进一步描述:
14.所述摄像头、红外热成像仪和空气检测器的输出端与plc控制器的输入端电连接,所述plc控制器通过无线连接器与终端pc无线连接,所述plc控制器的输出端分别与第一驱动电机、第二驱动电机和第三驱动电机的输入端电连接。
15.作为上述技术方案的进一步描述:
16.所述倒凹型架的内部顶端粘接有清灰棉条。
17.本实用新型提供了一种具有自清洁功能巡检机器人。具备以下有益效果:
18.(1)该一种具有自清洁功能巡检机器人,在使用的过程中,通过控制转轴和旋转轴转动,可以调节巡检装置本体的水平方向和竖直方向的角度,便于对任意位置进行巡检,其次分别采用第二驱动电机和第三驱动电机用于带动转轴和旋转轴转动,采用plc控制器控制第二驱动电机和第三驱动电机工作,plc控制器通过无线连接器与终端pc无线连接,从而可通过终端pc远程控制调节巡检装置本体的角度。
19.(2)该一种具有自清洁功能巡检机器人,巡检装置本体上集成设置有摄像头、红外热成像仪和空气检测器,通过摄像头的设置,使得该巡检机器人能够采集现场设备、煤料的图像视频传输到终端pc进行存储和显示,通过红外热成像仪的设置,使得该巡检机器人能够拍摄设备和煤料表面的红外热图,并能从红外热图中提取设备温度信息,然后传输到终端pc,进一步通过空气检测器的设置,使得该巡检机器人能够采集监测环境气体数据信息,并且实时传输到终端pc进行显示和存储,从而使得该巡检机器人采集信息全面,对比于传统单一的图像采集巡检机器人,极大化的提高其使用效果。
附图说明
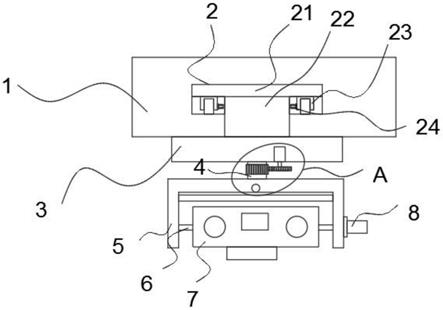
20.图1为本实用新型提出的一种具有自清洁功能巡检机器人的主视图;
21.图2为本实用新型中图1中的a区放大图;
22.图3为本实用新型中巡检装置本体的剖视图;
23.图4为本实新型提出的一种具有自清洁功能巡检机器人的程序框图;
24.图5为本实用新型中导轨的结构示意图。
25.图例说明:
26.1、导轨;2、行走机构;21、滑动座;22、连接座;23、滚轮;24、第一驱动电机;3、安装座;4、转轴;41、从动齿轮;42、第二驱动电机;43、主动齿轮;5、倒凹型架;6、旋转轴;7、巡检装置本体;71、红外测距仪;72、摄像头;73、红外热成像仪;74、空气检测器;75、蓄电池;76、plc控制器;77、无线连接器;78、清灰棉条;8、第三驱动电机。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
28.参照图1-5,一种具有自清洁功能巡检机器人,包括导轨1、行走机构2和巡检装置本体7,导轨1内设置有行走机构2,行走机构2的底部设置有安装座3,安装座3下表面中心处转动连接有转轴4,转轴4的底端焊接有倒凹型架5,倒凹型架5内通过旋转轴6转动连接有巡
检装置本体7,倒凹型架5外壁上固接有带动旋转轴6转动的第三驱动电机8;
29.巡检装置本体7前表面嵌设安装有摄像头72、红外热成像仪73,巡检装置本体7内部安装有蓄电池75、plc控制器76和无线连接器77,巡检装置本体7下表面安装有空气检测器74。
30.本实施例中,巡检装置本体7背面还设有充电孔,充电孔用于蓄电池75充电。蓄电池75用于给巡检装置本体7提供电能。
31.行走机构2包括设置在导轨1内的滑动座21和焊接在滑动座21下表面中心处的连接座22,安装座3焊接在连接座22的底端,滑动座21下表面位于连接座22的两侧螺栓固定有滚轮23,滚轮23上安装有带动第一驱动电机24。
32.本实施例中,第一驱动电机24用于调动滚轮23转动,通过滚轮23在导轨1上行走,从而带动巡检装置本体7移动,进行巡检工作。
33.转轴4上焊接有从动齿轮41,安装座3下表面嵌设安装有第二驱动电机42,第二驱动电机42的输出轴上固接有主动齿轮43,主动齿轮43与从动齿轮41齿轮啮合连接。
34.本实施例中,第二驱动电机42用于带动主动齿轮43转动,主动齿轮43通过从动齿轮41可以带动转轴4转动,从而通过转轴4带动倒凹型架5转动,对巡检装置本体7进行水平方向的位置调节。
35.倒凹型架5前表面中心处嵌设安装有红外测距仪71,红外测距仪71的输出端与plc控制器76的输入端电连接。
36.倒凹型架5的内部顶端粘接有清灰棉条78。
37.本实施例中 ,通过控制第三驱动电机8工作,第三驱动电机8通过旋转轴6带动巡检装置本体7转动,使得巡检装置本体7上设置的摄像头72、红外热成像仪73可以与清灰棉条78接触,通过清灰棉条78自动擦拭摄像头72、红外热成像仪73表面的灰尘,实现自清洁。
38.本实施例中,红外测距仪71用于检测巡检装置本体7前方是否有障碍物,当红外测距仪71检测到障碍物信息时,会将采集的数据传输到plc控制器76,此时plc控制器76会控制第一驱动电机24停止工作,使得行走机构2不在移动,同时plc控制器76通过无线连接器77向终端pc传输信息,提醒使用者。
39.摄像头72、红外热成像仪73和空气检测器74的输出端与plc控制器76的输入端电连接,plc控制器76通过无线连接器77与终端pc无线连接,plc控制器76的输出端分别与第一驱动电机24、第二驱动电机42和第三驱动电机8的输入端电连接。
40.工作原理:该一种具有自清洁功能巡检机器人使用时,首先使用者可通过终端pc发送命令给plc控制76,通过plc控制器76控制第二驱动电机42和第三驱动电机8工作,对巡检装置本体7进行角度调节,调节完成后,此时可以通过终端pc发送命令给plc控制器76,通过plc控制器76控制关闭第一驱动电机24和第二驱动电机42,此时可以再次通过终端pc发送命令给plc控制器,控制第一驱动电机24、红外测距仪71、摄像头72、红外热成像仪73和空气检测器74工作,通过第一驱动电机24带动滚轮23在导轨1上行走,带动巡检装置本体7移动,通过摄像头72、红外热成像仪73和空气检测器74采用信息然后传输到plc控制器76,然后通过无线连接器77传输到终端pc进行存储和显示。
41.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料过着特点包含于本发明的至少一个实施
例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
42.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1