仿生六足搜救机器人的制作方法
1.本实用新型实施例涉及机器人相关技术领域,具体涉及一种仿生六足搜救机器人。
背景技术:
2.我国幅员辽阔,地大物博,但同时也位于世界两大地震带——环太平洋地震带与欧亚地震带的交汇部位,地震活动具有频度高、强度大、震源浅、分布广的特点,是一个震灾严重的国家。
3.地震带来的灾害是无法估量的,对社会的恶劣影响是难以预计的。当高楼大厦轰然倒塌,其巨大的体型和产生的无数碎屑会对受困人员带来难以想象的威胁,也会对救援人员的工作产生巨大的阻碍。
4.目前,地震发生后,主要依靠人力对被困人员进行搜寻,但是,震后灾区崎岖不平、路况复杂、人员分布情况复杂,人力搜寻效率是有限的,而且在一些管道、废墟内搜救人员无法直接深入,造成搜寻不及时,可能延误最佳救援时间。因此,亟需设计一种仿生六足搜救机器人来解决上述问题。
技术实现要素:
5.为此,本实用新型实施例提供一种仿生六足搜救机器人,以解决目前地震发生后依靠人力搜寻被困人员效率低、搜寻不及时的问题。
6.为了实现上述目的,本实用新型实施例提供如下技术方案:一种仿生六足搜救机器人,包括头部和腹部,所述头部连接于腹部上,所述头部左右两侧设置有两排下肢,所述下肢为多级机械臂,所述头部上设置有高清摄像头,所述头部上还设置有红外探测器,所述腹部设置有控制与通信模块。
7.优选地,所述头部左右两侧各设置有三个下肢。
8.优选地,所述头部包括头部本体和下肢连接架,所述下肢连接架接于头部本体的下方,所述下肢连接架包括上层连接板和下层连接板,所述上层连接板与下层连接板之间设置有左右两排连接柱,所述上层连接板与下层连接板之间通过左右两排连接柱相接,每个连接柱的中部均用于连接下肢。
9.优选地,所述下肢包括连接座,所述连接座连接于对应的连接柱上,所述连接座上铰接有长臂,所述长臂的另一端铰接有短臂,所述短臂的另一端铰接有支撑臂。
10.进一步优选地,所述支撑臂包括支撑板,所述支撑板内侧的中部固定设置有定位块,所述定位块上固定设置有第一配合座,所述定位块的上方固定设置有第二配合座,所述定位块的下方固定设置有第三配合座,所述第一配合座上转动设置有第一配合轴,所述第一配合轴的两端上下均设置有连杆,所述第一配合轴上侧设置的连杆通过一根轴与第二配合座相配合连接,所述第一配合轴下侧设置的连杆直接连接于第三配合座上,所述第一配合座上的第一配合轴与短臂相配合。
11.进一步优选地,所述支撑板的两端向内弯曲形成弧形板。
12.进一步优选地,所述短臂包括中部的短臂本体,所述短臂本体的一端设置有轴配合部,所述短臂本体的另一端设置有长臂配合部,所述轴配合部与第一配合轴转动配合,所述长臂配合部是在短臂本体的末端中部开槽,所述长臂的一端转动配合于长臂配合部的槽内。
13.进一步优选地,所述长臂包括长臂本体,长臂本体的一端为短臂配合部,短臂配合部配合于长臂配合部的槽内,长臂本体的另一端为连接座配合部,连接座配合部与连接座铰接。
14.本实用新型至少具有如下优点:
15.1.本实用新型涉及的一种仿生六足搜救机器人,借助仿生蚂蚁的微小体型以及多自由度的下肢结构实现在复杂路况中自由穿梭,可用于灾后的极端搜救场景,再通过设置高清摄像头、红外探测器以及控制与通信模块等,进行实时搜寻,不仅搜寻效率高,而且搜寻及时;
16.2.将下肢设置为多级机械臂,在路况复杂的灾区,活动灵活,可直接深入一些搜救人员无法进入的管道、废墟内进行搜寻,提高搜寻效率。
附图说明
17.为了更清楚地说明本实用新型的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单的介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引申获得其它的实施附图。
18.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应落在本实用新型所揭示的技术内容所能涵盖的范围内。
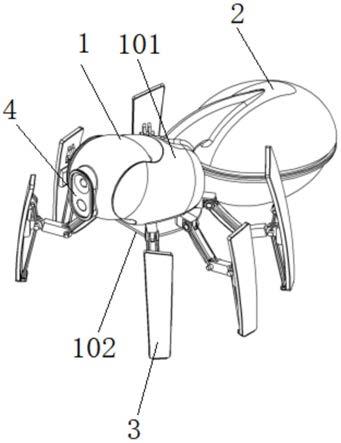
19.图1为本实用新型一种仿生六足搜救机器人一种实施例的结构示意图;
20.图2为图1中下肢连接架与下肢的配合关系示意图;
21.图3为图2中连接座、长臂、短臂以及支撑臂的连接关系结构示意图;
22.其中:1-头部;101-头部本体;102-下肢连接架;1021-上层连接板;1022-下层连接板;1023-连接柱;2-腹部;3-下肢;301-连接座;302-长臂;303-短臂;3031-轴配合部;3032-长臂配合部;304-支撑臂;3041-支撑板;3042-定位块;3043-第一配合座;3044-第二配合座;3045-第三配合座;3046-第一配合轴;3047-连杆;4-高清摄像头。
具体实施方式
23.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护
的范围。
24.请参照图1~3,本实用新型提出一种技术方案:一种仿生六足搜救机器人,包括头部1和腹部2,头部1连接于腹部2上,头部1左右两侧设置有两排下肢3,下肢3为多级机械臂,实现多自由度的运动以及具有延展性的整体架构,拥有在重大灾害后的环境下进行自由穿梭的能力,头部1上设置有高清摄像头4,进行实时摄像,头部1上还设置有红外探测器,用于进行生命体征的检测,腹部2设置有控制与通信模块,进行信息的处理与消息的发送;
25.头部1左右两侧各设置有三个下肢3;
26.头部1包括头部本体101和下肢连接架102,下肢连接架102接于头部本体101的下方,用于连接下肢3,下肢连接架102包括上层连接板1021和下层连接板1022,上层连接板1021与下层连接板1022之间设置有左右两排连接柱1023,上层连接板1021与下层连接板1022之间通过左右两排连接柱1023相接,每个连接柱1023的中部均用于连接下肢3;
27.下肢3包括连接座301,连接座301连接于对应的连接柱1023上,连接座301上铰接有长臂302,长臂302的另一端铰接有短臂303,短臂303的另一端铰接有支撑臂304;
28.支撑臂304包括支撑板3041,支撑板3041内侧的中部固定设置有定位块3042,定位块3042上固定设置有第一配合座3043,定位块3042的上方固定设置有第二配合座3044,定位块3042的下方固定设置有第三配合座3045,第一配合座3043上转动设置有第一配合轴3046,第一配合轴3046的两端上下均设置有连杆3047,第一配合轴3046上侧设置的连杆3047通过一根轴与第二配合座3044相配合连接,第一配合轴3046下侧设置的连杆3047直接连接于第三配合座3045上,第一配合座3043上的第一配合轴3046与短臂303相配合;
29.支撑板3041的两端向内弯曲形成弧形板;
30.短臂303包括中部的短臂本体,短臂本体的一端设置有轴配合部3031,短臂本体的另一端设置有长臂配合部3032,轴配合部3031与第一配合轴3046转动配合,长臂配合部3032是在短臂本体的末端中部开槽,长臂302的一端转动配合于长臂配合部3032的槽内;
31.长臂302包括长臂本体,长臂本体的一端为短臂配合部,短臂配合部配合于长臂配合部3032的槽内,长臂本体的另一端为连接座配合部,连接座配合部与连接座301铰接;
32.本产品在复杂地形拥有高可动性,可实现自主探测、搜救的功能。将此机器人投放到受灾区域,可进入救援人员无法深入的管道、废墟当中,在搜寻到被困人员后可传递搜救信号,辅助救援人员进行搜救探索,多个机器人协同可组成搜救网络,可最大化的提高搜救和探测效率。
33.本产品从蚂蚁在找到食物后将信息返回蚁巢的行为中获得灵感,构建了一套“蚂蚁—蚁巢—互联网”的局部信息网络系统,从而快速准确高效的探知受困人员的位置信息,给救援工作的开展提供便利,为受困人员的生命安全增设保障。
34.对蚂蚁结构进行仿生,以分米级别的身躯在地震后的废墟残骸中自由探索,能够实现救援人员所无法实现的路径,使整个工作更加便利。
35.搭载超宽谱雷达生命探测技术,能够在复杂环境中快速定位受困人员位置,并在中控芯片处理后由通信模块提供给后方云平台,使能高效的提供救援所需相关信息。
36.后方蚁巢作为收集信息的协作平台,将信息汇总上传至互联网云平台,可以实现多平台协作互动,大范围信息全覆盖的功能。连点成面,真正地实现灾区快速覆盖,信息高效同步。
37.将多个蚁巢均匀投放于受灾区域,蚁巢释放蚂蚁呈网状搜寻被困人员,蚂蚁在找到被困人员后向所属的蚁巢传递信号,蚁巢间进行信息沟通,由可联网的蚁巢将信息上传至互联网云平台。
38.主要技术路线如下:
39.机械结构:借鉴蚂蚁的身体构造,用多级机械臂构成下肢,实现多自由度的运动结构及具有延展性的整体构架。
40.功能实现:蚂蚁的头部搭载探测器,腹部搭载控制与通信模块实现功能,蚁巢搭载云平台技术,实现信息的收集与同步。
41.工作逻辑:由stm32中控芯片规划蚂蚁行程,同时接收探测器的信号,通过通信模块返回到蚁巢,由蚁巢处理信号形成数据信息实现后台同步。
42.云端架构:各个蚁巢收集对应蚂蚁返回的位置信息,处理后远程返回至云端,由中央计算机进行集中并形成完整数据构架,真正实现大范围全覆盖的信息同步处理。
43.借助仿生蚂蚁的微小体型以及多自由度的下肢结构实现在复杂路况中自由穿梭的功能,可用于灾后的极端场景。
44.多个蚁巢相互协作,能够迅速在没有电力网络的灾区快速搭建起救援信息网络,最大化地提升救灾效率。
45.对产品进行模块化设计,形成生态开环,可以派生出多功能的分支,因地制宜应用于不同场景。
46.本产品能够在控制成本的情况下,由机电产品代替人力劳动,快速的实现大范围的信息覆盖,故可用于地震等灾后地区,能够有效地解决因复杂路况和信号不好等造成的救援难度高和效率低下的问题。
47.当然,本产品还可应用于其他场景,在紧急医疗场景中,蚂蚁可以携带小型医药箱,由蚁巢指示迅速抵达现场帮助施救人员处理受伤人员的伤势;在地貌还原的场景中,蚂蚁可以配置简单的运动传感器和红外探测技术,蚁巢云平台收集数据并同步计算,实现大范围高效率的地貌检测和模型还原;在疫情防控的场景中,蚁巢借助大数据确定位置,通过蚂蚁实现无接触式防疫物资如口罩等的精准派送和发放;在火场救援的场景中,利用蚂蚁体型小,行动力强,信息同步的特点可以使其快速定位火场中受困人员的位置,便于展开救援;在沙漠绿化的场景中,利用蚁群覆盖范围广的特点可以使蚂蚁实时监测防护林,沙漠绿化带等面积极大,环境恶劣的地区,实现实时的检测和信息反馈。
48.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之做一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1