电动工具以及辅助把持器的制作方法
1.本发明涉及一种电动工具以及辅助把持器。
背景技术:
2.在利用电动工具对对象物进行加工的情况下,前端工具被安装于电动工具的输出轴。电动工具通过使前端工具进行旋转而对对象物进行加工。在对象物的加工中,有可能反作用力作用于电动工具。作业者通过保持装配于电动工具的辅助把持器,能够承受作用于电动工具的反作用力。日本特开2015-123521号公报公开了辅助把持器的一例。
技术实现要素:
3.本发明的目的在于,在辅助把持器装配于电动工具时,使反作用力作用于电动工具。
4.本发明的第1方案是能够装配于电动工具的辅助把持器,该辅助把持器具有:第1臂部;第2臂部,在其与所述第1臂部之间对所述电动工具的至少一部分进行紧固;把持部;手柄传感器,其在通过所述第1臂部和所述第2臂部而对所述电动工具的至少一部分进行紧固的状态下,对所述把持部是否已被握持进行检测;以及信号输出部,其基于所述手柄传感器的检测信号,将表示所述把持部已被握持的手柄信号向所述电动工具输出。
5.本发明的第2方案是能够装配辅助把持器的电动工具,该电动工具具有:马达;外壳,其具有收纳所述马达的马达收纳部;齿轮箱,其配置于所述马达收纳部的前方;输出轴,其从所述齿轮箱向前方突出,先利用所述马达的旋转力而进行旋转;装配传感器,其对是否已装配有所述辅助把持器进行检测,以及控制器,其基于所述装配传感器的检测信号,输出对所述输出轴的旋转进行控制的控制信号。
6.根据本发明,在电动工具上装配有辅助把持器时,能够使反作用力作用于电动工具。
附图说明
7.图1是表示第1实施方式的电动工具的立体图。
8.图2是表示第1实施方式的电动工具的一部分的剖视图。
9.图3是表示第1实施方式的辅助把持器的立体图。
10.图4是表示第1实施方式的辅助把持器的剖视图。
11.图5是表示第1实施方式的电动工具与辅助把持器之间的关系的图。
12.图6是表示第1实施方式的电动工具与辅助把持器之间的关系的图。
13.图7是表示第1实施方式的电动工具的框图。
14.图8是表示第1实施方式的电动工具的控制方法的流程图。
15.图9是表示第2实施方式的电动工具的框图。
16.图10是表示第2实施方式的电动工具的控制方法的流程图。
17.图11是表示第3实施方式的电动工具的框图。
18.图12是表示第3实施方式的电动工具的控制方法的流程图。
19.图13是表示第4实施方式的电动工具的框图。
20.图14是表示第4实施方式的电动工具的控制方法的流程图。
21.图15是表示第5实施方式的电动工具的框图。
22.图16是表示第5实施方式的电动工具的控制方法的流程图。
23.图17是表示第6实施方式的辅助把持器的侧视图。
24.图18是表示第6实施方式的辅助把持器的侧视图。
25.图19是表示第6实施方式的电动工具的框图。
26.图20是表示第6实施方式的电动工具的控制方法的流程图。
27.图21是表示第7实施方式的电动工具的框图。
28.图22是表示第7实施方式的电动工具的控制方法的流程图。
29.图23是表示第8实施方式的辅助把持器的侧视图。
30.图24是表示第8实施方式的辅助把持器的剖视图。
31.图25是表示第8实施方式的辅助把持器的把持部的剖视图。
32.图26是表示第8实施方式的辅助把持器的第1臂部的图。
33.图27是表示第9实施方式的辅助把持器的侧视图。
34.图28是表示第9实施方式的辅助把持器的把持部的剖视图。
35.图29是表示第10实施方式的辅助把持器的立体图。
36.图30是表示第11实施方式的辅助把持器的侧视图。
37.图31是表示第11实施方式的辅助把持器的剖视图。
38.图32是表示第11实施方式的辅助把持器的把持部的剖视图。
39.图33是表示从左方观察第11实施方式的辅助把持器而得到的图。
40.图34是表示第12实施方式的辅助把持器的把持部的剖视图。
41.图35是表示第13实施方式的辅助把持器的立体图。
42.图36是表示第13实施方式的辅助把持器的第2臂部的剖视图
具体实施方式
43.下面,参照附图,对本发明的实施方式进行说明,本发明并不限定于实施方式。以下说明的实施方式的构成要素可以进行适当组合。另外,也有时不采用一部分构成要素。
44.在实施方式中,采用“前”、“后”、“左”、“右”、“上”以及“下”的术语,对各部分的位置关系进行说明。这些术语表示以电动工具的中心为基准的相对位置或方向。
45.实施方式的电动工具是具有马达的振动起子电钻。在实施方式中,将与马达的旋转轴ax平行的方向适当地称为轴向。将马达的旋转轴ax的放射方向适当地称为径向。将围绕马达的旋转轴ax转圈的方向适当地称为周向或者旋转方向。另外,在径向上,将马达的旋转轴ax附近位置、或者接近于马达的旋转轴ax的方向适当地称为径向内侧。将远离马达的旋转轴ax的位置、或者与马达的旋转轴ax分离开的方向适当地称为径向外侧。在实施方式中,轴向与前后方向相一致。
46.[第1实施方式]
[0047]
<电动工具的概要>
[0048]
图1是表示本实施方式的电动工具1a的立体图。如图1所示,电动工具1a具有:外壳2、后罩3、齿轮箱5、输出轴6、蓄电池装配部7、马达8、动力传递机构10、控制器13、触发器式开关14、正反切换拨挡15、速度切换拨挡16、模式切换环17、切换环18、以及照明灯19。
[0049]
外壳2由合成树脂形成。外壳2具有:马达收纳部2a、手柄部2b、以及控制器收纳部2c。
[0050]
马达收纳部2a收纳马达8。马达收纳部2a为筒状。手柄部2b由作业者把持。手柄部2b从马达收纳部2a的下部向下方突出。控制器收纳部2c收纳控制器13。控制器收纳部2c配置于手柄部2b的下部。
[0051]
后罩3以覆盖马达收纳部2a的后部的开口的方式连接于马达收纳部2a的后部。后罩3是合成树脂制的。
[0052]
马达收纳部2a具有吸气口4a。后罩3具有排气口4b。排气口4b设置于吸气口4a的后方。吸气口4a将外壳2的内部空间与外部空间连接起来。排气口4b将外壳2的内部空间与外部空间连接起来。吸气口4a分别设置于马达收纳部的左部以及右部。排气口4b分别设置于后罩3的左部以及右部。外壳2的外部空间的空气经由吸气口4a而流入于外壳2的内部空间。据此,马达8被冷却。外壳2的内部空间的空气经由排气口4b而流出到外壳2的外部空间。
[0053]
齿轮箱5收纳:包括多个齿轮在内的动力传递机构10。齿轮箱5为筒状。动力传递机构10配置于齿轮箱5的内部空间。齿轮箱5配置于马达收纳部2a的前方。齿轮箱5由铝等金属形成。
[0054]
齿轮箱5具有卡合部9。卡合部9设置于齿轮箱5的表面的侧部。本实施方式的卡合部9具有:设置于齿轮箱5左部的左卡合部9l、以及设置于齿轮箱5右部的右卡合部9r。左卡合部9l具有:设置于齿轮箱5左部的凹部。右卡合部9r具有:设置于齿轮箱5右部的凹部。
[0055]
输出轴6在安装有前端工具的状态下,通过马达8的旋转力而进行旋转。输出轴6具有:能够把持前端工具的卡盘62。输出轴6从齿轮箱5向前方突出。
[0056]
蓄电池装配部7设置于控制器收纳部2c的下部。蓄电池12以能够拆装的方式装配于蓄电池装配部7。装配于蓄电池装配部7的蓄电池12向电动工具1a供电。
[0057]
蓄电池12包括二次电池。本实施方式的蓄电池12包括:充电式的锂离子电池。蓄电池12具有解除按钮12c。操作解除按钮12c能够解除蓄电池装配部7与蓄电池12之间的固定。解除按钮12c设置于蓄电池12的前表面。
[0058]
马达8产生用于驱使输出轴6旋转的旋转力。马达8基于从蓄电池12供给的电力而旋转。动力传递机构10将由马达8产生的旋转力传递给输出轴6。输出轴6基于借助动力传递机构10从马达8传递来的旋转力,而进行旋转。
[0059]
控制器13输出:对电动工具1a进行控制的控制信号。控制器13被收纳在控制器收纳部2c。
[0060]
触发器式开关14设置于手柄部2b。触发器式开关14具有:触发器式部件14a以及开关主体14b。触发器式部件14a从手柄部2b的前部的上部向前方突出。为了马达8的旋转,作业者操作触发器式部件14a。作业者在用左右的一方的手把持手柄部2b的状态下,用手指操作触发器式部件14a。触发器式部件14a能够在前后方向上移动。通过触发器式部件14a以向后方移动的方式被操作,使得马达8旋转。
[0061]
手柄部2b具有:能够收纳开关主体14b的内部空间。开关主体14b配置于手柄部2b的内部空间。通过操作触发器式部件14a,开关主体14b输出触发信号。基于从开关主体14b输出的触发信号,控制器13将电力从蓄电池12向马达8供给。据此,马达8进行旋转。通过对触发器式部件14a进行操作,马达8的旋转和停止被切换。
[0062]
正反切换拨挡15设置于手柄部2b的侧部的上部。正反切换拨挡15由作业者操作。通过对正反切换拨挡15进行操作,马达8的旋转方向被切换。作业者操作正反切换拨挡15,能够将马达8的旋转方向切换到正转方向或者反转方向。据此,输出轴6的旋转方向被切换。
[0063]
速度切换拨挡16配置于马达收纳部2a的上部。作业者操作速度切换拨挡16,以便对输出轴6的旋转速度进行切换。速度切换拨挡16能够在前后方向上移动。通过使速度切换拨挡16向前方移动,被切换到:输出轴6的旋转速度成为第1速度的低速模式。通过使速度切换拨挡16向后方移动,被切换到:输出轴6的旋转速度成为比第1速度高的第2速度的高速模式。
[0064]
模式切换环17配置于齿轮箱5的前方。作业者操作模式切换环17,以便切换电动工具1a的作业模式。模式切换环17能够在旋转轴ax的周向上旋转。通过模式切换环17进行旋转,作业模式被切换。
[0065]
电动工具1a的作业模式具有:振动模式以及非振动模式。在振动模式下,输出轴6在前后方向上振动。在非振动模式下,输出轴6在前后方向上不振动。
[0066]
非振动模式具有:离合器模式以及钻头模式。在离合器模式下,作用于输出轴6的旋转负荷达到释放值时,切断从马达8向输出轴6传递的旋转力。在钻头模式下,与作用于输出轴6的旋转负荷无关,不切断从马达8向输出轴6传递的旋转力。释放值是:作用于输出轴6的旋转负荷的值。作业者通过操作模式切换环17,能够切换振动模式、钻头模式、以及离合器模式。
[0067]
切换环18配置于模式切换环17的前方。作业者操作切换环18,以便在离合器模式下变更释放值。切换环18能够在旋转轴ax的周向上旋转。通过切换环18进行旋转,能够变更离合器模式下的释放值。
[0068]
照明灯19设置于手柄部2b的前部的上部。照明灯19照射出:对电动工具1a的前方进行照明的照明光。照明灯19例如为发光二极管(led:light emitting diode)。
[0069]
<电动工具的内部构造>
[0070]
图2是本实施方式的电动工具1a的剖视图。如图2所示,电动工具1a具有:马达8、动力传递机构10、以及输出轴6。马达8被收纳在马达收纳部2a。动力传递机构10被收纳在齿轮箱5。在输出轴6安装前端工具。
[0071]
马达8产生:驱使输出轴6旋转的旋转力。马达8是内转子型的无刷马达。马达8具有:筒状的定子81、以及配置于定子81的内侧的转子82。马达8(转子82)的旋转轴ax沿着前后方向延伸。
[0072]
定子81具有:定子铁芯81a、前绝缘子81b、后绝缘子81c、多个线圈81d、传感器电路基板81e、结线部件81f。定子铁芯81a具有:被层叠的多个钢板。前绝缘子81b配置于定子铁芯81a的前部。后绝缘子81c配置于定子铁芯81a的后部。多个线圈81d经由前绝缘子81b以及后绝缘子81c而被卷绕于定子铁芯81a。传感器电路基板81e安装于前绝缘子81b。结线部件81f被支撑于前绝缘子81b。传感器电路基板81e具有:检测转子82的旋转的多个旋转检测元
件。结线部件81f连接多个线圈81d。
[0073]
转子82具有:转子轴82a、转子铁芯82b、以及多个永久磁铁82c。转子铁芯82b为筒状,配置于转子轴82a的周围。多个永久磁铁82c被保持于转子铁芯82b。转子轴82a与转子铁芯82b被固定。转子轴82a的前部以能够旋转的方式被支撑于轴承83。转子轴82a的后部以能够旋转的方式被支撑于轴承84。
[0074]
在轴承84与定子81之间的转子轴82a安装有离心风扇85。排气口4b配置于离心风扇85的周围的一部分。转子轴82a进行旋转,通过离心风扇85进行旋转,马达收纳部2a的内部空间的空气会经由排气口4b而被排出到马达收纳部2a的外部空间。
[0075]
在转子轴82a的前端部设置有小齿轮21s。转子轴82a借助小齿轮21s而连结于动力传递机构10。
[0076]
齿轮箱5具有:第1齿轮箱5a以及第2齿轮箱5b。第2齿轮箱5b配置于第1齿轮箱5a的前方。卡合部9设置于第2齿轮箱5b的表面。
[0077]
动力传递机构10将由马达8产生的旋转力传递给输出轴6。动力传递机构10具有:减速机构20、振动机构30、以及离合器机构40。
[0078]
减速机构20对转子轴82a的旋转进行减速,以比转子轴82a的旋转速度低的旋转速度而驱使输出轴6进行旋转。
[0079]
减速机构20具有:第1行星齿轮机构21、第2行星齿轮机构22、以及第3行星齿轮机构23。第2行星齿轮机构22配置于第1行星齿轮机构21的前方。第3行星齿轮机构23配置于第2行星齿轮机构22的前方。
[0080]
第1行星齿轮机构21具有:多个行星齿轮21p、第1齿轮架21c、以及内齿轮21r。多个行星齿轮21p配置于小齿轮21s的周围。第1齿轮架21c对多个行星齿轮21p进行支撑。内齿轮21r配置于多个行星齿轮21p的周围。
[0081]
第2行星齿轮机构22具有:太阳齿轮22s、多个行星齿轮22p、第2齿轮架22c、以及内齿轮22r。多个行星齿轮22p配置于太阳齿轮22s的周围。第2齿轮架22c对多个行星齿轮22p进行支撑。内齿轮22r配置于多个行星齿轮22p的周围。太阳齿轮22s配置于第1齿轮架21c的前方。太阳齿轮22s的直径小于:第1齿轮架21c的直径。第1齿轮架21c与太阳齿轮22s呈一体。第1齿轮架21c与太阳齿轮22s一起进行旋转。
[0082]
第3行星齿轮机构23具有:太阳齿轮23s、多个行星齿轮23p、第3齿轮架23c、以及内齿轮23r。多个行星齿轮23p配置于太阳齿轮23s的周围。第3齿轮架23c对多个行星齿轮23p进行支撑。内齿轮23r配置于多个行星齿轮23p的周围。太阳齿轮23s配置于第2齿轮架22c的前方。太阳齿轮23s的直径小于:第2齿轮架22c的直径。第2齿轮架22c与太阳齿轮23s呈一体。第2齿轮架22c与太阳齿轮23s一起进行旋转。
[0083]
转子轴82a的旋转轴ax、第1齿轮架21c的旋转轴、第2齿轮架22c的旋转轴、以及第3齿轮架23c的旋转轴相一致。
[0084]
减速机构20具有:速度切换环24以及结合环25。速度切换环24连结于速度切换拨挡16。结合环25配置于速度切换环24的前方。结合环25固定于第1齿轮箱5a的内表面。
[0085]
速度切换拨挡16借助速度切换环24而连结于内齿轮22r。通过速度切换拨挡16在前后方向上移动,在第1齿轮箱5a的内侧,内齿轮22r在前后方向上移动。内齿轮22r在与行星齿轮22p啮合的状态下,能够在前后方向上移动。
[0086]
通过速度切换拨挡16向前方移动,内齿轮22r会向前方移动。而且,内齿轮22r与结合环25接触。据此,内齿轮22r的旋转被限制。
[0087]
通过速度切换拨挡16向后方移动,内齿轮22r会向后方移动。而且,内齿轮22r从结合环25离开。据此,允许内齿轮22r进行旋转。
[0088]
内齿轮22r通过向前方移动,而只与行星齿轮22p啮合。内齿轮22r通过向后方移动而与行星齿轮22p以及第1齿轮架21c双方啮合。
[0089]
在内齿轮22r已移动到前方的状态下,当转子轴82a进行旋转时,小齿轮21s会进行旋转,行星齿轮21p在小齿轮21s的周围进行公转。通过行星齿轮21p进行公转,第1齿轮架21c以及太阳齿轮22s会以比转子轴82a的旋转速度低的旋转速度进行旋转。当太阳齿轮22s进行旋转时,行星齿轮22p在太阳齿轮22s的周围进行公转。通过行星齿轮22p进行公转,第2齿轮架22c以及太阳齿轮23s会以比第1齿轮架21c的旋转速度低的旋转速度进行旋转。这样,在内齿轮22r已移动到前方的状态下,当马达8进行驱动时,使第1行星齿轮机构21的减速功能以及第2行星齿轮机构22的减速功能双方发挥作用,第2齿轮架22c以及太阳齿轮23s在低速模式下进行旋转。
[0090]
在内齿轮22r已移动到后方的状态下,通过马达8进行驱动,转子轴82a进行旋转时,小齿轮21s进行旋转,行星齿轮21p在小齿轮21s的周围进行公转。通过行星齿轮21p进行公转,第1齿轮架21c以及太阳齿轮22s会以比转子轴82a的旋转速度低的旋转速度进行旋转。在内齿轮22r已移动到后方的状态下,由于内齿轮22r是与行星齿轮22p以及第1齿轮架21c双方啮合,因此,内齿轮22r与第1齿轮架21c一起进行旋转。通过内齿轮22r进行旋转,行星齿轮22p以与内齿轮22r的旋转速度相同的公转速度进行公转。通过行星齿轮22p进行公转,第2齿轮架22c以及太阳齿轮23s以与第1齿轮架21c的旋转速度相同的旋转速度进行旋转。这样,在内齿轮22r已移动到后方的状态下,当马达8驱动时,虽然能够使第1行星齿轮机构21的减速功能发挥作用,但不使第2行星齿轮机构22的减速功能发挥作用,第2齿轮架22c以及太阳齿轮23s在高速模式下进行旋转。
[0091]
当第2齿轮架22c以及太阳齿轮23s进行旋转时,行星齿轮23p在太阳齿轮23s的周围进行公转。据此,第3齿轮架23c进行旋转。
[0092]
输出轴6在安装有前端工具的状态下进行旋转。输出轴6具有:主轴61以及卡盘62。卡盘62连结于主轴61的前部。
[0093]
主轴61连结于第3齿轮架23c。通过第3齿轮架23c进行旋转,主轴61进行旋转。主轴61的旋转轴与马达8的旋转轴ax相一致。
[0094]
主轴61被轴承63以及轴承64以能够旋转的方式支撑。主轴61在被支撑于轴承63以及轴承64的状态下,能够在前后方向上移动。
[0095]
卡盘62能够保持前端工具。卡盘62连结于主轴61的前部。通过主轴61进行旋转,卡盘62进行旋转。卡盘62在对前端工具进行保持的状态下进行旋转。
[0096]
振动机构30使输出轴6在前后方向上进行振动。振动机构30具有:第1凸轮31、第2凸轮32、以及振动切换拨挡33。
[0097]
第1凸轮31配置于主轴61的周围。第1凸轮31固定于主轴61。第1凸轮31与主轴61一起进行旋转。在第1凸轮31的后表面设置有凸轮齿。
[0098]
第2凸轮32配置于第1凸轮31的后方。第2凸轮32配置于主轴61的周围。第2凸轮32
能够与主轴61相对旋转。在第2凸轮32的前表面设置有凸轮齿。第2凸轮32的前表面的凸轮齿与第1凸轮31的后表面的凸轮齿啮合。在第2凸轮32的后表面设置有爪。
[0099]
振动切换拨挡33对振动模式和非振动模式进行切换。在振动模式下,主轴61在前后方向上振动。在非振动模式下,主轴61在前后方向上不振动。振动切换拨挡33能够在前后方向上移动。通过振动切换拨挡33在前后方向上移动,对振动模式和非振动模式进行切换。
[0100]
模式切换环17连结于振动切换拨挡33。通过作业者操作模式切换环17,振动切换拨挡33在前后方向上移动。通过对模式切换环17进行操作,对振动模式与非振动模式进行切换。
[0101]
在振动模式下,第2凸轮32的旋转被限制。在非振动模式下,第2凸轮32的旋转被允许。当振动切换拨挡33向前方移动时,第2凸轮32的旋转被限制,被切换到振动模式。当振动切换拨挡33向后方移动时,第2凸轮32的旋转被允许,被切换到非振动模式。
[0102]
在振动模式下,已移动到前方的振动切换拨挡33的至少一部分与第2凸轮32接触。据此,第2凸轮32的旋转被限制。在该状态下,当马达8进行旋转时,固定于主轴61的第1凸轮31一边与第2凸轮32的凸轮齿接触一边进行旋转。据此,主轴61一边在前后方向上振动一边进行旋转。
[0103]
在非振动模式下,已移动到后方的振动切换拨挡33从第2凸轮32离开。据此,第2凸轮32的旋转被允许。在该状态下,当马达8进行旋转时,第2凸轮32与第1凸轮31以及主轴61一起进行旋转。据此,主轴61不在前后方向上振动地进行旋转。
[0104]
振动切换拨挡33配置于第1凸轮31以及第2凸轮32的周围。另外,振动切换拨挡33具有:与第2凸轮32的后表面对置的对置部33a。对置部33a从振动切换拨挡33的后部向径向内侧突出。
[0105]
在振动切换拨挡33的后方配置有螺旋弹簧34。螺旋弹簧34产生使振动切换拨挡33向前方移动的作用力。
[0106]
模式切换环17具有:操作环17a以及凸轮环17b。操作环17a由作业者操作。凸轮环17b连结于操作环17a。凸轮环17b配置在:比操作环17a靠向径向内侧的位置。凸轮环17b的后表面的至少一部分与振动切换拨挡33的前表面接触。
[0107]
在凸轮环17b的后表面的一部分设置有凹部。在振动切换拨挡33被赋予了螺旋弹簧34的弹力的状态下,当模式切换环17进行旋转时,在振动切换拨挡33的前部配置于凸轮环17b的凹部的状态和不被配置于凸轮环17b的凹部的状态之间进行切换。
[0108]
通过振动切换拨挡33的前部配置于凸轮环17b的凹部,振动切换拨挡33向前方移动,第2凸轮32的后表面的爪与振动切换拨挡33的对置部33a相接触。据此,被切换到:第2凸轮32的旋转被限制的振动模式。
[0109]
通过不使振动切换拨挡33的前部配置于凸轮环17b的凹部,振动切换拨挡33向后方移动,第2凸轮32的后表面的爪与振动切换拨挡33的对置部33a分离开。据此,被切换到:第2凸轮32的旋转被允许的非振动模式。
[0110]
在作用于输出轴6的旋转负荷已达到释放值时,离合器机构40切断从马达8传递给输出轴6的旋转力。
[0111]
离合器机构40具有:弹簧保持器41、螺旋弹簧42、垫圈43、按压销(未图示)、以及连结环45。
[0112]
弹簧保持器41对螺旋弹簧42进行保持。弹簧保持器41能够在前后方向上移动。弹簧保持器41具有:外螺纹部。外螺纹部与设置于切换环18的内螺纹部结合。通过切换环18进行旋转,弹簧保持器41在前后方向上移动。
[0113]
螺旋弹簧42能够产生:使第3行星齿轮机构23的内齿轮23r向后方移动的作用力。螺旋弹簧42的后端部与垫圈43接触。螺旋弹簧42能够产生:借助垫圈43以及按压销而使内齿轮23r向后方移动的作用力。
[0114]
垫圈43配置于螺旋弹簧42的后方。垫圈43能够在前后方向上移动。垫圈43能够旋转。垫圈43配置于第2齿轮箱5b的内筒部的周围。垫圈43在第2齿轮箱5b的内筒部的周围,能够在前后方向上移动,并能够旋转。
[0115]
按压销配置于垫圈43的后方。按压销与第3行星齿轮机构23的内齿轮23r的前表面接触。在内齿轮23r的前表面设置有离合器凸轮。按压销能够与内齿轮23r的离合器凸轮卡合。
[0116]
螺旋弹簧42以将按压销按压于内齿轮23r的前表面的方式产生作用力。通过将按压销按压于内齿轮23r,内齿轮23r的离合器凸轮与按压销卡合,内齿轮23r的旋转被限制。即,通过螺旋弹簧42的作用力,内齿轮23r的旋转被限制。
[0117]
在作用于输出轴6的旋转负荷小于从螺旋弹簧42赋予给内齿轮23r的作用力的情况下,按压销就会无法越过内齿轮23r的离合器凸轮,从而按压销与内齿轮23r的离合器凸轮之间的卡合会继续下去。据此,内齿轮23r的旋转被限制。在该状态下,通过马达8进行驱动,主轴61进行旋转。
[0118]
在作用于输出轴6的旋转负荷已超过从螺旋弹簧42赋予给内齿轮23r的作用力的情况下,按压销就会越过内齿轮23r的离合器凸轮,从而按压销与内齿轮23r的离合器凸轮之间的卡合被解除。据此,内齿轮23r的旋转被允许。在该状态下,通过马达8进行驱动,内齿轮23r进行空转,主轴61不进行旋转。
[0119]
这样,即便是内齿轮23r能够旋转的状态,在作用于输出轴6的旋转负荷小于从螺旋弹簧42赋予给内齿轮23r的作用力的情况下,通过螺旋弹簧42的弹力,内齿轮23r的旋转被限制。另一方面,在内齿轮23r能够旋转的状态下,在作用于输出轴6的旋转负荷已超过从螺旋弹簧42赋予给内齿轮23r的作用力的情况下,内齿轮23r进行空转。据此,从马达8传递给输出轴6的旋转力被切断。
[0120]
通过操作切换环18,弹簧保持器41在前后方向上移动。据此,螺旋弹簧42的长度(压缩量)发生变化。即,通过弹簧保持器41进行移动,螺旋弹簧42的弹力发生变化,赋予给内齿轮23r的作用力被变更。据此,切断传递给输出轴6的动力时的释放值被设定。
[0121]
连结环45配置于垫圈43的周围。在垫圈43的外表面设置有凸部。在连结环45的内表面设置有:供垫圈43的凸部配置的凹部。在旋转方向上,垫圈43的凸部与连结环45的凹部进行位置对准,由此垫圈43能够在前后方向上移动。另外,通过垫圈43的凸部配置于连结环45的凹部,垫圈43能够与连结环45一起旋转。
[0122]
通过模式切换环17进行旋转,连结环45能够与垫圈43以及操作环17a一起旋转。
[0123]
在第2齿轮箱5b设置有:对垫圈43向前方的移动进行限制的前方移动限制部。当垫圈43向前方的移动被限制时,与内齿轮23r的离合器凸轮卡合的按压销向前方的移动也被限制。
[0124]
<作业模式的切换>
[0125]
通过操作模式切换环17,电动工具1a的作业模式被变更。作业模式具有:钻头模式、离合器模式、以及振动模式。
[0126]
在钻头模式下,输出轴6在前后方向上不振动,而且不实施由离合器机构40进行的旋转力的传递的切断。例如,在使用前端工具对对象物打孔时,选择钻头模式。钻头模式是非振动模式的一种。
[0127]
在离合器模式下,输出轴6在前后方向上不振动,而且实施:由离合器机构40进行的旋转力的传递的切断。例如,在使用前端工具向对象物紧固螺丝时,选择离合器模式。离合器模式是非振动模式的一种。
[0128]
在振动模式下,输出轴6在前后方向上振动,而且不实施:由离合器机构40进行的旋转力的传递的切断。例如,在使用前端工具对对象物进行打孔时,选择振动模式。
[0129]
在设定为钻头模式的情况下,作业者操作模式切换环17,以使得模式切换环17配置于第1旋转位置。当模式切换环17被操作时,凸轮环17b进行旋转。据此,连结环45以及垫圈43进行旋转。凸轮环17b以及垫圈43配置于第1旋转位置。
[0130]
当垫圈43配置于第1旋转位置时,设置于第2齿轮箱5b的前方移动限制部与垫圈43相卡合,垫圈43以及按压销向前方的移动被限制。在向前方的移动被限制的状态下,按压销与内齿轮23r的离合器凸轮相卡合。
[0131]
即便马达8进行驱动而使得内齿轮23r想要进行旋转,但由于按压销向前方的移动受到限制,因此,按压销与内齿轮23r的离合器凸轮之间的卡合没有被解除。即,由于按压销向前方的移动受到限制,因此,按压销无法越过内齿轮23r的离合器凸轮。因此,内齿轮23r的旋转被限制。在该状态下,输出轴6基于从马达8传递来的旋转力进行旋转。这样,与作用于输出轴6的旋转负荷的大小无关,输出轴6都进行旋转。
[0132]
当凸轮环17b配置于第1旋转位置时,振动切换拨挡33的前部没有配置于凸轮环17b的凹部,振动切换拨挡33配置于可动范围的后部。据此,振动切换拨挡33的对置部33a与第2凸轮32分离开。第2凸轮32能够与第1凸轮31以及主轴61一起旋转。输出轴6在前后方向上不振动。
[0133]
在设定为离合器模式的情况下,作业者操作模式切换环17,以使得模式切换环17配置于第2旋转位置。当模式切换环17被操作时,凸轮环17b进行旋转。据此,连结环45以及垫圈43进行旋转。凸轮环17b以及垫圈43配置于第2旋转位置。
[0134]
当垫圈43旋转到第2旋转位置时,设置于第2齿轮箱5b的前方移动限制部与垫圈43相卡合,允许垫圈43以及按压销向前方的移动。在该状态下,按压销卡合于内齿轮23r的离合器凸轮。按压销通过螺旋弹簧42的作用力,被按压于内齿轮23r的离合器凸轮。
[0135]
在马达8进行驱动而使得内齿轮23r想要进行旋转的情况下,当作用于输出轴6的旋转负荷小于从螺旋弹簧42赋予给内齿轮23r的作用力时,按压销不会越过内齿轮23r的离合器凸轮。因此,按压销与内齿轮23r的离合器凸轮之间的卡合会继续下去。据此,内齿轮23r的旋转被限制。在该状态下,通过马达8进行旋转,使得输出轴6进行旋转。
[0136]
另一方面,在作用于输出轴6的旋转负荷超过了从螺旋弹簧42赋予给内齿轮23r的作用力时,按压销会越过内齿轮23r的离合器凸轮。因此,按压销与内齿轮23r的离合器凸轮之间的卡合被解除。据此,允许内齿轮23r进行旋转。在该状态下,通过马达8进行驱动,内齿
轮23r进行空转,切断传递给输出轴6的旋转力。输出轴6不进行旋转。
[0137]
当凸轮环17b配置于第2旋转位置时,振动切换拨挡33的前部不插入于凸轮环17b的凹部,振动切换拨挡33配置于可动范围的后部。据此,振动切换拨挡33的对置部33a与第2凸轮32分离开。第2凸轮32能够与第1凸轮31以及主轴61一起旋转。输出轴6在前后方向上不振动。
[0138]
在设定为振动模式的情况下,作业者操作模式切换环17,以使得模式切换环17配置于第3旋转位置。当模式切换环17被操作时,凸轮环17b进行旋转。据此,连结环45以及垫圈43进行旋转。凸轮环17b以及垫圈43配置于第3旋转位置。
[0139]
当垫圈43配置于第3旋转位置时,设置于第2齿轮箱5b的前方移动限制部与垫圈43卡合,垫圈43以及按压销向前方的移动被限制。在该状态下,按压销卡合于内齿轮23r的离合器凸轮。
[0140]
即便马达8进行驱动而使得内齿轮23r想要进行旋转,但由于按压销向前方的移动受到限制,因此,按压销与内齿轮23r的离合器凸轮之间的卡合没有被解除。即,由于按压销向前方的移动受到限制,因此,按压销无法越过内齿轮23r的离合器凸轮。因此,内齿轮23r的旋转被限制。在该状态下,输出轴6基于从马达8传递来的旋转力进行旋转。这样,与作用于输出轴6的旋转负荷的大小无关,输出轴6都进行旋转。
[0141]
当凸轮环17b配置于第3旋转位置时,振动切换拨挡33的前部插入于凸轮环17b的凹部,振动切换拨挡33配置于可动范围的前部。据此,振动切换拨挡33的对置部33a与第2凸轮32的爪相接触,第2凸轮32的旋转被限制。在该状态下,当马达8进行旋转时,固定于主轴61的第1凸轮31一边与第2凸轮32的凸轮齿接触一边进行旋转。据此,输出轴6一边在前后方向上振动一边进行旋转。
[0142]
<动作>
[0143]
接下来,说明本实施方式的电动工具1a的动作的一例。当蓄电池装配部7装配有蓄电池12时,从蓄电池12向电动工具1a供电。在该状态下,当触发器式部件14a被操作时,从开关主体14b输出触发信号。基于从开关主体14b输出的触发信号,控制器13将电流向马达8供给。据此,转子轴82a进行旋转。
[0144]
通过转子轴82a进行旋转,借助动力传递机构10,主轴61进行旋转。据此,卡盘62进行旋转,安装于卡盘62的前端工具进行旋转。
[0145]
通过转子轴82a进行旋转,离心风扇85进行旋转。据此,空气在马达8的周围流通,马达8被冷却。在马达8的周围流通的空气从排气口4b被排出。
[0146]
<辅助把持器>
[0147]
图3是本实施方式的辅助把持器100a的立体图。图4是本实施方式的辅助把持器100a的剖视图。
[0148]
辅助把持器100a装配于电动工具1a。实施方式的辅助把持器100a装配于齿轮箱5。辅助把持器100a接受从输出轴6传递给齿轮箱5的反作用力。
[0149]
如图3以及图4所示,辅助把持器100a具有:第1臂部101、第2臂部102、杆部103、以及把持部104。第2臂部102相对于第1臂部101能够进行相对移动。
[0150]
第1臂部101以及第2臂部102分别装配于齿轮箱5。第2臂部102能够与第1臂部101相对移动。在第2臂部102与第1臂部101之间紧固齿轮箱5。通过利用第1臂部101与第2臂部
102对齿轮箱5进行保持,辅助把持器100a被装配于电动工具1a。
[0151]
杆部103连结于第2臂部102。在图3以及图4所示的例子中,第1臂部101配置于第2臂部102的右侧。杆部103从第2臂部102向左方延伸。第2臂部102连结于杆部103的前端部(右端部)。把持部104固定于杆部103的基端部(左端部)。
[0152]
把持部104由作业者把持。把持部104具有内部空间。在把持部104的右端部形成有:供杆部103的基端部配置的贯通孔107。贯通孔107将把持部104的内部空间与外部空间连通。
[0153]
杆部103具有:小径部103a以及大径部103b。小径部103a配置于把持部104的贯通孔107。大径部103b配置于把持部104的外部空间。小径部103a配置于杆部103的基端部(左端部)。小径部103a具有螺纹部。螺母108配置于把持部104的内部空间。螺母108固定于把持部104的内表面。通过将小径部103a的螺纹部与螺母108结合起来,杆部103与把持部104被固定。
[0154]
辅助把持器100a具有紧固机构110。紧固机构110使第1臂部101与第2臂部102相对移动。紧固机构110由作业者操作。通过对紧固机构110进行操作,第1臂部101与第2臂部102以接近或者分离开的方式进行相对移动。
[0155]
紧固机构110具有:杆部111、滑动部112、以及引导部113。杆部111固定于第1臂部101。滑动部112与杆部111之间能够进行相对移动。引导部113对第1臂部101与第2臂部102之间的相对移动进行引导。
[0156]
杆部111的至少一部分配置于:设置在第1臂部101的贯通孔105。贯通孔105在第1臂部101的上部,沿着左右方向延伸。在贯通孔105的右端部配置有螺母114。通过螺母114,杆部111与第1臂部101被固定。
[0157]
滑动部112为筒状。滑动部112配置于:设置在第2臂部102的贯通孔106。贯通孔106在第2臂部102的上部,沿着左右方向延伸。滑动部112的左端部与杆部103连结。在滑动部112的外表面设置有螺纹部。在贯通孔106的内表面设置有螺纹部。
[0158]
杆部111连结于滑动部112。第1臂部101与第2臂部102借助杆部111以及滑动部112而连结起来。
[0159]
作业者借助把持部104来操作紧固机构110。当通过作业者的操作,把持部104进行旋转时,滑动部112相对于杆部111进行旋转。杆部111固定于第1臂部101。因此,通过滑动部112进行旋转,第2臂部102在向第1臂部101接近的方向、或者从第1臂部101离开的方向上进行移动。
[0160]
引导部113为棒状。引导部113对第1臂部101与第2臂部102之间的相对移动进行引导。引导部113的右端部连结于第1臂部101。引导部113的左端部连结于第2臂部102。
[0161]
图5以及图6分别是表示本实施方式的电动工具1a与辅助把持器100a之间的关系的图。如图5所示,作业者在将辅助把持器100a装配于电动工具1a之前,以第1臂部101与第2臂部102分离开的方式操作把持部104。作业者将齿轮箱5配置在第1臂部101与第2臂部102之间。
[0162]
在该状态下,以第1臂部101与第2臂部102接近的方式操作把持部104。据此,如图6所示,齿轮箱5被第1臂部101以及第2臂部102紧固。
[0163]
第2臂部102具有:与齿轮箱5的卡合部9卡合的连结部11。连结部11包括:与卡合部
9的凹部啮合的凸部。卡合部9与辅助把持器100a的连结部11卡合。在图5以及图6所示的例子中,连结部11与左卡合部9l卡合。另外,通过改变辅助把持器100a的左右方向的朝向,连结部11能够与右卡合部9r卡合。
[0164]
在本实施方式的第2臂部102设置有贯通孔115以及拨盘116。止动杆(未图示)插入于贯通孔115。拨盘116对插入于贯通孔115的止动杆进行紧固。
[0165]
在本实施方式的辅助把持器100a设置有永久磁铁117。永久磁铁117分别设置于第1臂部101的下端部以及第2臂部102的下端部。另外,永久磁铁117也可以设置于第1臂部101以及第2臂部102的任何一方。
[0166]
<装配传感器>
[0167]
如图1以及图5所示,电动工具1a具有:用于检测辅助把持器100a是否已被装配于齿轮箱5的装配传感器70。本实施方式的装配传感器70是检测辅助把持器100a的永久磁铁117的磁性传感器。在齿轮箱5被第1臂部101以及第2臂部102紧固时,装配传感器70配置于能够与永久磁铁117对置的位置。装配传感器70通过检测永久磁铁117的磁力来检测辅助把持器100a已被装配在齿轮箱5。
[0168]
<控制器>
[0169]
图7是本实施方式的电动工具1a的框图。如图7所示,电动工具1a具有:装配传感器70、控制器13、触发器式开关14、逆变电路71、蓄电池12、以及马达8。
[0170]
控制器13基于装配传感器70的检测信号,输出对输出轴6的旋转进行控制的控制信号。本实施方式的控制器13基于装配传感器70的检测信号,设定与输出轴6的旋转相关的阈值,并基于阈值,输出对输出轴6的旋转进行控制的控制信号。
[0171]
本实施方式的阈值与作用于输出轴6的旋转负荷相关。控制器13基于装配传感器70的检测信号,判定为装配有辅助把持器100a的情况下,将与旋转负荷相关的阈值设定为第1扭矩值,在判定为未装配有辅助把持器100a的情况下,将与旋转负荷相关的阈值设定为比第1扭矩值低的第2扭矩值。
[0172]
控制器13具有:判定部13a、阈值设定部13b、以及马达控制部13c。
[0173]
判定部13a接收装配传感器70的检测信号。判定部13a基于装配传感器70的检测信号,判定:在齿轮箱5是否装配有辅助把持器100a。
[0174]
阈值设定部13b基于装配传感器70的检测信号,设定与作用于输出轴6的旋转负荷相关的阈值。阈值设定部13b在通过判定部13a而判定为在齿轮箱5装配有辅助把持器100a的情况下,将阈值设定为第1扭矩值。阈值设定部13b在通过判定部13a而判定为齿轮箱5未装配有辅助把持器100a的情况下,将阈值设定为第2扭矩值。第2扭矩值低于第1扭矩值。
[0175]
马达控制部13c输出:对输出轴6的旋转进行控制的控制信号。本实施方式的马达控制部13c输出:对马达8的旋转进行控制的控制信号。通过控制马达8的旋转来控制输出轴6的旋转。
[0176]
马达控制部13c接收:通过触发器式开关14被操作而生成的触发信号,并输出驱使马达8进行旋转的控制信号。
[0177]
在本实施方式中,从马达控制部13c输出的控制信号包括:作用于输出轴6的旋转负荷已超过阈值时使马达8的旋转停止下来的控制信号。
[0178]
马达控制部13c向逆变电路71输出控制信号。逆变电路71具有:多个开关元件。逆
变电路71基于从马达控制部13c输出的控制信号,对从蓄电池12向马达8的线圈81d供给的电流进行切换。例如,在设置6个线圈81d的情况下,逆变电路71基于从马达控制部13c输出的控制信号,对开关元件进行控制,以使得第1组的2个线圈81d成为u相线圈,第2组的2个线圈81d成为v相线圈,第3组的2个线圈81d成为w相线圈。据此,作为dc无刷马达的马达8的转子82通过从蓄电池12供给来的电流进行旋转。
[0179]
马达控制部13c对经由逆变电路71而从蓄电池12供给于线圈81d的电流进行监控。作用于输出轴6的旋转负荷与从蓄电池12供给于线圈81d的电流相关。作用于输出轴6的旋转负荷越高,从蓄电池12供给于线圈81d的电流就越高。作用于输出轴6的旋转负荷越低,从蓄电池12供给于线圈81d的电流就越低。马达控制部13c基于从蓄电池12供给于马达8的线圈81d的电流,计算出作用于输出轴6的旋转负荷。马达控制部13c在作用于输出轴6的旋转负荷已超过阈值时,将使马达8的旋转停止下来的控制信号向逆变电路71输出。
[0180]
<控制方法>
[0181]
图8是本实施方式的电动工具1a的控制方法的流程图。判定部13a接收装配传感器70的检测信号。判定部13a基于装配传感器70的检测信号,判定:在齿轮箱5是否装配有辅助把持器100a(步骤sa1)。
[0182]
在步骤sa1,判定为在齿轮箱5已装配有辅助把持器100a的情况下(步骤sa1:yes),阈值设定部13b将阈值设定为第1扭矩值(步骤sa2)。
[0183]
在步骤sa1,判定为在齿轮箱5未装配辅助把持器100a的情况下(步骤sa1:no),阈值设定部13b将阈值设定为比第1扭矩值低的第2扭矩值(步骤sa3)。
[0184]
当触发器式开关14被操作时,从触发器式开关14输出驱使马达8进行旋转的触发信号。马达控制部13c从触发器式开关14接收触发信号。马达控制部13c基于触发信号,将用于驱使马达8进行旋转的控制信号向逆变电路71输出(步骤sa4)。
[0185]
电流从蓄电池12被供给于马达8的线圈81d。马达控制部13c对经由逆变电路71而从蓄电池12供给于马达8的线圈81d的电流进行监控。马达控制部13c将电流从蓄电池12向马达8的线圈81d供给。马达控制部13c基于流动于线圈81d的电流,计算出作用于输出轴6的旋转负荷。
[0186]
马达控制部13c判定:作用于输出轴6的旋转负荷是否已超过阈值(步骤sa5)。
[0187]
在步骤sa5,判定为作用于输出轴6的旋转负荷没有超过阈值的情况下(步骤sa5:no),马达控制部13c使马达8的旋转继续下去。
[0188]
在步骤sa5,判定为作用于输出轴6的旋转负荷已超过阈值的情况下(步骤sa5:yes),马达控制部13c将用于使马达8的旋转停止下来的控制信号向逆变电路71输出(步骤sa6)。
[0189]
如以上所说明的那样,本实施方式的电动工具1a具备:检测是否已装配有辅助把持器100a的装配传感器70。控制器13基于装配传感器70的检测信号,输出对输出轴6的旋转进行控制的控制信号。
[0190]
控制器13在判定为在电动工具1a未装配有辅助把持器100a的情况下,以使得作用于输出轴6的旋转负荷不变大的方式来控制输出轴6的旋转。本实施方式的控制器13在判定为在电动工具1a未装配有辅助把持器100a的情况下,直至作用于输出轴6的旋转负荷超过第2扭矩值为止,驱使马达8进行旋转,而在作用于输出轴6的旋转负荷已超过第2扭矩值时
则使马达8的旋转停止下来。在电动工具1a未装配有辅助把持器100a的状态下实施了作业的情况下,作用于输出轴6的旋转负荷的最大值是:比第1扭矩值低的第2扭矩值。因此,大的反作用力作用于电动工具1a的情形得到抑制。
[0191]
控制器13在判定为在电动工具1a装配有辅助把持器100a的情况下,直至作用于输出轴6的旋转负荷超过第1扭矩值为止,驱使马达8进行旋转,在作用于输出轴6的旋转负荷已超过第1扭矩值时,使马达8的旋转停止下来。在电动工具1a装配有辅助把持器100a的状态下实施了作业的情况下,作用于输出轴6的旋转负荷的最大值是:比第2扭矩值高的第1扭矩值。在电动工具1a装配有辅助把持器100a、且作业者对辅助把持器100a进行保持的情况下,第1扭矩值作用于电动工具1a。
[0192]
[第2实施方式]
[0193]
说明第2实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0194]
<控制器>
[0195]
图9是本实施方式的电动工具1b的框图。如图9所示,电动工具1a具有:装配传感器70、控制器13、速度切换拨挡16、连结部件73、以及致动器72。连结部件73连结于速度切换拨挡16。致动器72能够借助连结部件73来操作速度切换拨挡16。
[0196]
如上所述,速度切换拨挡16将输出轴6的旋转速度在高速模式和低速模式之间进行切换。致动器72借助连结部件73而连接于速度切换拨挡16。通过致动器72进行驱动,速度切换拨挡16在前后方向上移动。当速度切换拨挡16移动到前方时,切换为低速模式。当速度切换拨挡16移动到后方时,切换为高速模式。
[0197]
控制器13基于装配传感器70的检测信号,判定为在齿轮箱5未装配有辅助把持器100a的情况下,以输出轴6的旋转速度成为高速模式的方式控制致动器72。即,控制器13以速度切换拨挡16向后方移动的方式控制致动器72。
[0198]
控制器13基于装配传感器70的检测信号,判定为在齿轮箱5装配有辅助把持器100a的情况下,以输出轴6的旋转速度成为低速模式的方式控制致动器72。即,控制器13以速度切换拨挡16向前方移动的方式控制致动器72。
[0199]
控制器13具有:判定部13d以及致动器控制部13e。
[0200]
判定部13a接收装配传感器70的检测信号。判定部13a基于装配传感器70的检测信号,判定在齿轮箱5是否装配有辅助把持器100a。
[0201]
致动器控制部13e输出:对输出轴6的旋转进行控制的控制信号。本实施方式的致动器控制部13e将用于使速度切换拨挡16移动的控制信号向致动器72输出。通过移动速度切换拨挡16,输出轴6的旋转速度被控制为低速模式或者高速模式。
[0202]
<控制方法>
[0203]
图10是本实施方式的电动工具1b的控制方法的流程图。判定部13d接收装配传感器70的检测信号。判定部13d基于装配传感器70的检测信号,判定:在齿轮箱5是否装配有辅助把持器100a(步骤sb1)。
[0204]
在步骤sb1,判定为在齿轮箱5装配有辅助把持器100a的情况下(步骤sb1:yes),致动器控制部13e以将输出轴6设定为低速模式的方式向致动器72输出控制信号。即,致动器控制部13e以速度切换拨挡16向前方移动的方式向致动器72输出控制信号(步骤sb2)。
[0205]
在步骤sb1,判定为在齿轮箱5未装配有辅助把持器100a的情况下(步骤sb1:no),致动器控制部13e以将输出轴6设定为高速模式的方式向致动器72输出控制信号。即,致动器控制部13e以速度切换拨挡16向后方移动的方式向致动器72输出控制信号(步骤sb3)。
[0206]
如以上所说明的那样,根据本实施方式,在齿轮箱5未装配有辅助把持器100a的状态下,输出轴6被设定为高速模式,在齿轮箱5装配有辅助把持器100a的状态下,输出轴6被设定为低速模式。在低速模式下实施作业的情况下,相比于在高速模式下实施作业的情况,有可能作用于电动工具1b的反作用力较大。即,在低速模式下输出轴6所产生的扭矩高于:在高速模式下输出轴6所产生的扭矩。因此,在低速模式下实施作业的情况下,有可能作用于电动工具1b的反作用力较大。
[0207]
根据本实施方式,在电动工具1b未装配有辅助把持器100a的状态下,输出轴6被设定为高速模式,在低速模式下无法实施作业。所以,在电动工具1b未装配有辅助把持器100a时,较大的反作用力作用于电动工具1b的情形得到抑制。在电动工具1b装配有辅助把持器100a的状态下,输出轴6被设定为低速模式。在低速模式的作业中,在电动工具1b装配有辅助把持器100a,作业者对辅助把持器100a进行保持的情况下,较大的反作用力作用于电动工具1b。
[0208]
[第3实施方式]
[0209]
说明第3实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0210]
<控制器>
[0211]
图11是本实施方式的电动工具1c的框图。如图11所示,电动工具1c具有:装配传感器70、控制器13、触发器式开关14、逆变电路71、蓄电池12、马达8、以及加速度传感器74。
[0212]
加速度传感器74配置于外壳2的至少一部分。加速度传感器74配置于例如控制器收纳部2c。加速度传感器74检测外壳2的加速度。在使用电动工具1c的作业中,在反作用力作用于输出轴6的情况下,作业者很难稳定地保持电动工具1c,电动工具1c有可能以输出轴6为中心进行旋转。加速度传感器74检测:电动工具1c以输出轴6为中心进行旋转之时的外壳2的加速度。在电动工具1c以输出轴6为中心进行激烈旋转的情况下,外壳2的加速度变高。
[0213]
控制器13基于装配传感器70的检测信号,输出对输出轴6的旋转进行控制的控制信号。本实施方式的控制器13基于装配传感器70的检测信号,设定与外壳2的加速度相关的阈值,并基于阈值,输出对输出轴6的旋转进行控制的控制信号。
[0214]
控制器13在基于装配传感器70的检测信号,判定为装配有辅助把持器100a的情况下,将与加速度相关的阈值设定为第1加速度值,在判定为未装配有辅助把持器100a的情况下,将与加速度相关的阈值设定为比第1加速度值低的第2加速度值。
[0215]
控制器13具有:判定部13f、阈值设定部13g、以及马达控制部13h。
[0216]
判定部13f接收装配传感器70的检测信号。判定部13f基于装配传感器70的检测信号,判定:在齿轮箱5是否装配有辅助把持器100a。
[0217]
阈值设定部13g基于装配传感器70的检测信号来设定与外壳2的加速度相关的阈值。阈值设定部13g在通过判定部13f而判定为在齿轮箱5装配有辅助把持器100a的情况下,将阈值设定为第1加速度值。阈值设定部13g在通过判定部13f而判定为在齿轮箱5未装配有
辅助把持器100a的情况下,将阈值设定为第2加速度值。第2加速度值低于第1加速度值。
[0218]
马达控制部13h输出对马达8的旋转进行控制的控制信号。通过控制马达8的旋转来控制输出轴6的旋转。
[0219]
在本实施方式中,从马达控制部13h输出的控制信号包括:在外壳2的加速度已超过阈值之时使马达8的旋转停止下来的控制信号。
[0220]
<控制方法>
[0221]
图12是本实施方式的电动工具1c的控制方法的流程图。判定部13f接收装配传感器70的检测信号。判定部13f基于装配传感器70的检测信号,判定:在齿轮箱5是否装配有辅助把持器100a(步骤sc1)。
[0222]
在步骤sc1,判定为在齿轮箱5装配有辅助把持器100a的情况下(步骤sc1:yes),阈值设定部13g将阈值设定为第1加速度值(步骤sc2)。
[0223]
在步骤sc1,判定为在齿轮箱5未装配有辅助把持器100a的情况下(步骤sc1:no),阈值设定部13g将阈值设定为比第1加速度值低的第2加速度值(步骤sc3)。
[0224]
当触发器式开关14被操作时,从触发器式开关14输出用于使马达8进行旋转的触发信号。马达控制部13h从触发器式开关14接收触发信号。马达控制部13h基于触发信号,将用于使马达8进行旋转的控制信号向逆变电路71输出(步骤sc4)。
[0225]
马达控制部13h接收加速度传感器74的检测信号。马达控制部13h基于加速度传感器74的检测信号,判定外壳2的加速度是否已超过阈值(步骤sc5)。
[0226]
在步骤sc5,判定为外壳2的加速度未超过阈值的情况下(步骤sc5:no),马达控制部13h使马达8的旋转继续下去。
[0227]
在步骤sc5,判定为外壳2的加速度已超过阈值的情况下(步骤sc5:yes),马达控制部13h将使马达8的旋转停止的控制信号向逆变电路71输出(步骤sc6)。
[0228]
如以上所说明的那样,根据本实施方式,控制器13在判定为在电动工具1c未装配有辅助把持器100a的情况下,直至外壳2的加速度超过第2加速度值为止,使马达8进行旋转,在外壳2的加速度已超过第2加速度值之时,使马达8的旋转停止下来。在电动工具1c未装配有辅助把持器100a的状态下,反作用力作用于输出轴6的情况下,作业者很难稳定地保持电动工具1c,电动工具1c有可能以输出轴6为中心进行旋转。在本实施方式中,在外壳2的加速度已超过比第1加速度值低的第2加速度值之时,使马达8的旋转停止下来。即,在较大的反作用力作用于电动工具1c之前,马达8的旋转被停止。因此,较大的反作用力作用于电动工具1c的情形得到抑制。
[0229]
控制器13在判定为在电动工具1c装配有辅助把持器100a的情况下,直至外壳2的加速度超过第1加速度值为止,使马达8进行旋转,在外壳2的加速度已超过第1加速度值之时,使马达8的旋转停止下来。在电动工具1c装配有辅助把持器100a,作业者对辅助把持器100a进行保持的情况下,较大的反作用力作用于电动工具1c。
[0230]
[第4实施方式]
[0231]
说明第4实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0232]
<控制器>
[0233]
图13是本实施方式的电动工具1d的框图。如图13所示,电动工具1d具有:装配传感
器70、控制器13、触发器式开关14、逆变电路71、蓄电池12、马达8、以及拨盘75。
[0234]
本实施方式的电动工具1d不具有:上述的实施方式所说明的离合器机构40。控制器13能够设定离合器模式和钻头模式。控制器13在离合器模式下,作用于输出轴6的旋转负荷达到释放值之时使马达8的旋转停止下来。控制器13在钻头模式下,与作用于输出轴6的旋转负荷无关,使马达8进行旋转。
[0235]
释放值通过操作拨盘75进行设定。拨盘75设置于:例如控制器收纳部2c。作业者操作拨盘75来设定释放值。
[0236]
控制器13具有:判定部13i、扭矩范围设定部13j、以及马达控制部13k。
[0237]
判定部13i接收装配传感器70的检测信号。判定部13i基于装配传感器70的检测信号,判定在齿轮箱5是否装配有辅助把持器100a。
[0238]
扭矩范围设定部13j设定:表示利用拨盘75能够设定的释放值的范围的扭矩范围。扭矩范围设定部13j在通过判定部13i而判定为在齿轮箱5装配有辅助把持器100a的情况下,将扭矩范围设定为第1扭矩范围。扭矩范围设定部13j在通过判定部13i而判定为在齿轮箱5未装配有辅助把持器100a的情况下,将扭矩范围设定为第2扭矩范围。
[0239]
第2扭矩范围的最大值小于第1扭矩范围的最大值。例如,在能够以40级设定释放值的情况下,在齿轮箱5装配有辅助把持器100a时,第1扭矩范围包括40级的释放值。即,第1扭矩范围包括:第1释放值至第40释放值。在40级的释放值之中,第1释放值为最小,越接近于第40释放值,释放值会渐渐变大,第40释放值为最大。
[0240]
在齿轮箱5未装配有辅助把持器100a的情况下,第2扭矩范围包括:例如20级的释放值。第2扭矩范围包括:第1释放值至第20释放值。作为第2扭矩范围的最大值的第20释放值小于作为第1扭矩范围的最大值的第40释放值。
[0241]
马达控制部13k输出:对马达8的旋转进行控制的控制信号。通过控制马达8的旋转来控制输出轴6的旋转。
[0242]
马达控制部13k对经由逆变电路71而从蓄电池12供给于马达8的线圈81d的电流进行监控。马达控制部13k基于从蓄电池12供给于马达8的线圈81d的电流,计算出作用于输出轴6的旋转负荷。
[0243]
<控制方法>
[0244]
图14是本实施方式的电动工具1d的控制方法的流程图。判定部13i接收装配传感器70的检测信号。判定部13i基于装配传感器70的检测信号,判定在齿轮箱5是否装配有辅助把持器100a(步骤sd1)。
[0245]
在步骤sd1,判定为在齿轮箱5装配有辅助把持器100a的情况下(步骤sd1:yes),扭矩范围设定部13j将扭矩范围设定为第1扭矩范围(步骤sd2)。
[0246]
在步骤sd1,判定为在齿轮箱5未装配有辅助把持器100a的情况下(步骤sd1:no),扭矩范围设定部13j将扭矩范围设定为第2扭矩范围(步骤sd3)。
[0247]
作业者操作拨盘75来设定与使马达8的旋转停止的旋转负荷相关的释放值。拨盘75的操作信号被输出于扭矩范围设定部13j。扭矩范围设定部13j基于拨盘75的操作信号,设定释放值(步骤sd4)。
[0248]
在齿轮箱5装配有辅助把持器100a的情况下,即,在扭矩范围被设定为第1扭矩范围的情况下,作业者能够设定:从第1释放值至第40释放值的任意的释放值。
[0249]
在齿轮箱5未装配有辅助把持器100a的情况下,即,在扭矩范围被设定为第2扭矩范围的情况下,作业者虽然能够设定:从第1释放值至第20释放值的任意的释放值,但无法设定:从第21释放值至第40释放值的释放值。
[0250]
当触发器式开关14被操作时,从触发器式开关14输出用于使马达8进行旋转的触发信号。马达控制部13k从触发器式开关14接收触发信号。马达控制部13k基于触发信号,将用于使马达8进行旋转的控制信号向逆变电路71输出(步骤sd5)。
[0251]
将电流从蓄电池12向马达8的线圈81d供给。马达控制部13k对经由逆变电路71而从蓄电池12供给于马达8的线圈81d的电流进行监控。马达控制部13k基于从蓄电池12供给于马达8的线圈81d的电流,计算出作用于输出轴6的旋转负荷。
[0252]
马达控制部13k判定:作用于输出轴6的旋转负荷是否已超过释放值(步骤sd6)。
[0253]
在步骤sd6,判定为作用于输出轴6的旋转负荷未超过释放值的情况下(步骤sd6:no),马达控制部13k使马达8的旋转继续下去。
[0254]
在步骤sd6,判定为作用于输出轴6的旋转负荷已超过释放值的情况下(步骤sd6:yes),马达控制部13k将用于使马达8的旋转停止的控制信号向逆变电路71输出(步骤sd7)。
[0255]
如以上所说明的那样,本实施方式的控制器13在判定为在电动工具1d未装配有辅助把持器100a的情况下,禁止设定第21释放值以上的较大的释放值。据此,作用于输出轴6的旋转负荷变大的情形得到抑制。所以,较大的反作用力作用于电动工具1d的情形得到抑制。控制器13在判定为在电动工具1a装配有辅助把持器100a的情况下,允许设定较大的释放值(从第21释放值至第40释放值)。在电动工具1d装配有辅助把持器100a,且作业者对辅助把持器100a进行保持的情况下,较大的反作用力作用于电动工具1d。
[0256]
[第5实施方式]
[0257]
说明第5实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0258]
<控制器>
[0259]
图15是本实施方式的电动工具1e的框图。如图15所示,电动工具1e具有:装配传感器70、控制器13、触发器式开关14、逆变电路71、蓄电池12、马达8、以及位置传感器76。
[0260]
位置传感器76对速度切换拨挡16的位置进行检测。如上所述,速度切换拨挡16将输出轴6的旋转速度在高速模式与低速模式之间进行切换。当速度切换拨挡16移动到前方时,输出轴6的旋转速度被设定为低速模式。当速度切换拨挡16移动到后方时,输出轴6的旋转速度被设定为高速模式。位置传感器76检测:速度切换拨挡16是配置于速度切换拨挡16的可动范围的前端部还是配置于后端部。即,位置传感器76检测:输出轴6的旋转速度是被设定为低速模式还是被设定为高速模式。
[0261]
控制器13基于装配传感器70的检测信号以及位置传感器76的检测信号,判定为未装配有辅助把持器100a,且又判定为被设定为低速模式的情况下,禁止马达8的旋转。
[0262]
控制器13基于装配传感器70的检测信号以及位置传感器76的检测信号,判定为未装配有辅助把持器100a,且又判定为被设定为高速模式的情况下,使马达8进行旋转。
[0263]
控制器13基于装配传感器70的检测信号以及位置传感器76的检测信号,判定为装配有辅助把持器100a的情况下,使马达8进行旋转。
[0264]
控制器13具有:判定部13l以及马达控制部13m。
[0265]
判定部13l接收装配传感器70的检测信号。判定部13l基于装配传感器70的检测信号,判定:在齿轮箱5是否装配有辅助把持器100a。
[0266]
马达控制部13m输出:对马达8的旋转进行控制的控制信号。通过控制马达8的旋转来控制输出轴6的旋转。
[0267]
<控制方法>
[0268]
图16是本实施方式的电动工具1e的控制方法的流程图。判定部13l接收装配传感器70的检测信号。判定部13l基于装配传感器70的检测信号,判定:在齿轮箱5是否装配有辅助把持器100a(步骤se1)。
[0269]
在步骤se1,判定为在齿轮箱5装配有辅助把持器100a的情况下(步骤se1:yes),马达控制部13m基于触发信号,将用于使马达8进行旋转的控制信号向逆变电路71输出(步骤se2)。
[0270]
在步骤se1,判定为在齿轮箱5未装配有辅助把持器100a的情况下(步骤se1:no),马达控制部13m基于位置传感器76的检测信号,判定是否被设定为高速模式(步骤se3)。
[0271]
在步骤se3,判定为被设定为高速模式的情况下(步骤se3:yes),马达控制部13m基于触发信号,将用于使马达8进行旋转的控制信号向逆变电路71输出(步骤se2)。输出轴6在高速模式下进行旋转。
[0272]
在步骤se3,判定为未被设定为高速模式的情况下(步骤se3:no),马达控制部13m禁止马达8的旋转。马达控制部13m即便接收触发信号,也不使马达8进行旋转。马达控制部13m输出:用于使马达8停止下来的控制信号(步骤se4)。
[0273]
如以上所说明的那样,根据本实施方式,在未装配有辅助把持器100a,且被设定为低速模式的情况下,马达8不进行旋转。所以,在未装配有辅助把持器100a的状态下,较大的反作用力作用于电动工具1e的情形得到抑制。另外,即便未装配有辅助把持器100a,在被设定为高速模式的情况下,马达8也进行旋转,输出轴6在高速模式下进行旋转。在高速模式下,输出轴6所产生的扭矩低于在低速模式下输出轴6所产生的扭矩。所以,在使用电动工具1e的作业中,电动工具1e以输出轴6为中心进行旋转的情形得到抑制。在装配有辅助把持器100a的状态下,马达8进行旋转,输出轴6在高速模式或者低速模式下进行旋转。在电动工具1e装配有辅助把持器100a,且作业者对辅助把持器100a进行保持的情况下,较大的反作用力作用于电动工具1e。
[0274]
[第6实施方式]
[0275]
说明第6实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0276]
本实施方式是上述的第3实施方式的变形例。
[0277]
图17是本实施方式的第1辅助把持器100b的侧视图。本实施方式的第1辅助把持器100b不具有:第1臂部以及第2臂部。第1辅助把持器100b具有:杆部118以及把持部119。杆部118具有:大径部118b以及螺纹部118c。螺纹部118c具有比大径部118b小的直径。
[0278]
齿轮箱5具有向上方突出的凸部5c。在凸部5c设置有螺纹孔5d。第1辅助把持器100b的螺纹部118c插入于:设置在齿轮箱5的螺纹孔5d。通过结合螺纹部118c与螺纹孔5d,第1辅助把持器100b装配于齿轮箱5。
[0279]
图18是本实施方式的第2辅助把持器100c的侧视图。与第1辅助把持器100b同样
地,第2辅助把持器100c具有:杆部118以及把持部119。杆部118具有:大径部118b、以及插入于齿轮箱5的螺纹孔5d的螺纹部118c。
[0280]
第1辅助把持器100b的大径部118b的长度la大于:第2辅助把持器100c的大径部118b的长度la。第1辅助把持器100b的螺纹部118c的长度lb大于:第2辅助把持器100c的螺纹部118c的长度lb。长度la与长度lb实质上成正比例。长度la越长,长度lb就越长。长度la越短,长度lb就越短。
[0281]
齿轮箱5具有装配传感器77。装配传感器77检测:是否已装配有第1辅助把持器100b或者第2辅助把持器100c。装配传感器77配置于螺纹孔5d的内侧。当第1辅助把持器100b或者第2辅助把持器100c插入于螺纹孔5d时,第1辅助把持器100b或者第2辅助把持器100c与装配传感器77接触。装配传感器77通过与第1辅助把持器100b或者第2辅助把持器100c接触来检测:是否已装配有第1辅助把持器100b或者第2辅助把持器100c。
[0282]
装配传感器77检测:插入于螺纹孔5d的螺纹部118c的长度lb。装配传感器77沿着螺纹孔5d的长度方向延伸。装配传感器77基于与螺纹部118c之间的接触量来检测长度lb。如上所述,长度la与长度lb实质上成正比例。装配传感器77通过检测长度lb来检测长度la。
[0283]
<控制器>
[0284]
图19是本实施方式的电动工具1f的框图。如图19所示,电动工具1f具有:装配传感器77、控制器13、触发器式开关14、逆变电路71、蓄电池12、马达8、以及加速度传感器74。
[0285]
与上述的第3实施方式同样地,加速度传感器74在使用电动工具1f的作业中,检测:电动工具1f以输出轴6为中心进行旋转时的外壳2的加速度。在电动工具1f以输出轴6为中心进行激烈旋转的情况下,外壳2的加速度变高。
[0286]
控制器13基于装配传感器77的检测信号,输出对输出轴6的旋转进行控制的控制信号。控制器13基于装配传感器77的检测信号,设定与外壳2的加速度相关的阈值。控制器13基于阈值,输出对输出轴6的旋转进行控制的控制信号。从控制器13输出的控制信号包括:在由加速度传感器74检测到的外壳2的加速度超过阈值时使马达8的旋转停止下来的控制信号。
[0287]
如上所述,装配传感器77检测:第1辅助把持器100b的大径部118b的长度la以及第2辅助把持器100c的大径部118b的长度la。在以下的说明中,将第1辅助把持器100b的长度la适当地称为第1长度。将第2辅助把持器100c的长度la适当地称为第2长度。
[0288]
控制器13基于装配传感器77的检测信号,判定为装配有第1长度的第1辅助把持器100b的情况下,将阈值设定为第1加速度值。控制器13基于装配传感器77的检测信号,判定为装配有比第1长度短的第2长度的第2辅助把持器100c的情况下,将阈值设定为比第1加速度值低的第2加速度值。控制器13基于装配传感器77的检测信号,判定为未装配有第1辅助把持器100b以及第2辅助把持器100c的情况下,将阈值设定为比第2加速度值低的第3加速度值。
[0289]
控制器13具有:判定部13n、阈值设定部13o、以及马达控制部13p。
[0290]
判定部13n接收装配传感器77的检测信号。判定部13n基于装配传感器77的检测信号,判定:在齿轮箱5是否装配有第1辅助把持器100b或者第2辅助把持器100c。另外,判定部13n基于装配传感器77的检测信号,判定长度lb,来确定:在齿轮箱5装配有第1辅助把持器100b或者第2辅助把持器100c的哪一个辅助把持器。
[0291]
阈值设定部13o基于装配传感器77的检测信号,设定与外壳2的加速度相关的阈值。阈值设定部13o在通过判定部13n而判定为在齿轮箱5装配有第1长度的第1辅助把持器100b的情况下,将阈值设定为第1加速度值。阈值设定部13o在通过判定部13n而判定为在齿轮箱5装配有第2长度的第2辅助把持器100c的情况下,将阈值设定为比第1加速度值低的第2加速度值。阈值设定部13o在通过判定部13n而判定为在齿轮箱5未装配有第1辅助把持器100b以及第2辅助把持器100c的情况下,将阈值设定为比第2加速度值低的第3加速度值。
[0292]
马达控制部13p输出:对马达8的旋转进行控制的控制信号。通过控制马达8的旋转来控制输出轴6的旋转。
[0293]
<控制方法>
[0294]
图20是本实施方式的电动工具1f的控制方法的流程图。判定部13n接收装配传感器77的检测信号。判定部13n基于装配传感器77的检测信号,判定:在齿轮箱5是否装配有第1辅助把持器100b(步骤sf1)。
[0295]
在步骤sf1,判定为在齿轮箱5装配有第1辅助把持器100b的情况下(步骤sf1:yes),阈值设定部13o将阈值设定为第1加速度值(步骤sf2)。
[0296]
在步骤sf1,判定为在齿轮箱5未装配有第1辅助把持器100b的情况下(步骤sf1:no),判定部13n基于装配传感器77的检测信号,判定:在齿轮箱5是否装配有第2辅助把持器100c(步骤sf3)。
[0297]
在步骤sf3,判定为在齿轮箱5装配有第2辅助把持器100c的情况下(步骤sf3:yes),阈值设定部13o将阈值设定为比第1加速度值低的第2加速度值(步骤sf4)。
[0298]
在步骤sf3,判定为在齿轮箱5未装配有第1辅助把持器100b以及第2辅助把持器100c的情况下(步骤sf3:no),阈值设定部13o将阈值设定为比第2加速度值低的第3加速度值(步骤sf5)。
[0299]
当触发器式开关14被操作时,从触发器式开关14输出用于使马达8进行旋转的触发信号。马达控制部13p从触发器式开关14接收触发信号。马达控制部13p基于触发信号,将用于使马达8进行旋转的控制信号向逆变电路71输出(步骤sf6)。
[0300]
马达控制部13p接收加速度传感器74的检测信号。马达控制部13p基于加速度传感器74的检测信号,判定:作用于外壳2的加速度是否已超过阈值(步骤sf7)。
[0301]
在步骤sf7,判定为作用于外壳2的加速度未超过阈值的情况下(步骤sf7:no),马达控制部13p使马达8的旋转继续下去。
[0302]
在步骤sf7,判定为作用于外壳2的加速度已超过阈值的情况下(步骤sf7:yes),马达控制部13p将用于使马达8的旋转停止的控制信号向逆变电路71输出(步骤sf8)。
[0303]
如以上所说明的那样,本实施方式的控制器13在判定为在电动工具1f未装配有第1辅助把持器100b以及第2辅助把持器100c的情况下,直至外壳2的加速度超过第3加速度值为止,使马达8进行旋转,在外壳2的加速度已超过第3加速度值之时,使马达8的旋转停止下来。在电动工具1f未装配有第1辅助把持器100b以及第2辅助把持器100c的状态下,反作用力作用于输出轴6的情况下,电动工具1c有可能以输出轴6为中心进行激烈旋转。在本实施方式中,在外壳2的加速度已超过第3加速度值之时,使马达8的旋转停止下来。即,在较大的反作用力作用于电动工具1f之前,马达8的旋转被停止。因此,较大的反作用力作用于电动工具1f的情形得到抑制。
[0304]
控制器13在判定为在电动工具1f装配有第2辅助把持器100c的情况下,直至外壳2的加速度超过第2加速度值为止,使马达8进行旋转,在外壳2的加速度已超过第2加速度值之时,使马达8的旋转停止下来。在电动工具1f装配有第2辅助把持器100c的状态下,即便反作用力作用于输出轴6,作业者通过对第2辅助把持器100c进行保持,也能够稳定地保持电动工具1f。
[0305]
控制器13在判定为在电动工具1f装配有第1辅助把持器100b的情况下,直至外壳2的加速度超过第1加速度值为止,使马达8进行旋转,在外壳2的加速度已超过第1加速度值之时,使马达8的旋转停止下来。第1辅助把持器100b比第2辅助把持器100c长。因此,在电动工具1f装配有第1辅助把持器100b的状态下,即便有更大的反作用力作用于输出轴6,作业者也能够通过对第1辅助把持器100b进行保持来稳定地保持电动工具1f。
[0306]
[第7实施方式]
[0307]
说明第7实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0308]
本实施方式是上述的第4实施方式的变形例。另外,与上述的第6实施方式同样地,齿轮箱5具有螺纹孔5d,在齿轮箱5装配有第1辅助把持器100b或者第2辅助把持器100c。
[0309]
<控制器>
[0310]
图21是本实施方式的电动工具1g的框图。如图21所示,电动工具1d具有:装配传感器77、控制器13、触发器式开关14、逆变电路71、蓄电池12、马达8、以及拨盘75。
[0311]
与上述的第4实施方式同样地,电动工具1f不具有离合器机构40。控制器13能够设定离合器模式与钻头模式。控制器13在离合器模式下,作用于输出轴6的旋转负荷达到释放值之时,使马达8的旋转停止下来。控制器13在钻头模式下,与作用于输出轴6的旋转负荷无关,使马达8进行旋转。
[0312]
释放值通过操作拨盘75而进行设定。拨盘75设置于例如控制器收纳部2c。作业者操作拨盘75来设定释放值。
[0313]
控制器13具有:判定部13q、扭矩范围设定部13r、以及马达控制部13s。
[0314]
判定部13q接收装配传感器77的检测信号。判定部13q基于装配传感器77的检测信号,判定:在齿轮箱5是否装配有第1辅助把持器100b或者第2辅助把持器100c。另外,判定部13q基于装配传感器77的检测信号,判定长度lb,来确定:在齿轮箱5装配有第1辅助把持器100b或者第2辅助把持器100c的哪一个辅助把持器。
[0315]
扭矩范围设定部13r设定:表示利用拨盘75能够设定的释放值的范围的扭矩范围。扭矩范围设定部13r在通过判定部13q而判定为在齿轮箱5装配有第1辅助把持器100b的情况下,将扭矩范围设定为第1扭矩范围。扭矩范围设定部13r在通过判定部13q而判定为在齿轮箱5装配有第2辅助把持器100c的情况下,将扭矩范围设定为第2扭矩范围。扭矩范围设定部13r在通过判定部13q而判定为在齿轮箱5未装配有第1辅助把持器100b以及第2辅助把持器100c的情况下,将扭矩范围设定为第3扭矩范围。
[0316]
第3扭矩范围的最大值小于第2扭矩范围的最大值。第2扭矩范围的最大值小于第1扭矩范围的最大值。例如,在能够以40级来设定释放值的情况下,在齿轮箱5装配有第1辅助把持器100b时,第1扭矩范围包括:40级的释放值。即,第1扭矩范围包括:第1释放值至第40释放值。在40级的释放值之中,第1释放值为最小,越接近于第40释放值,释放值会渐渐变
大,第40释放值为最大。在齿轮箱5装配有第2辅助把持器100c的情况下,第2扭矩范围包括:例如30级的释放值。第2扭矩范围包括:第1释放值至第30释放值。在齿轮箱5未装配有第1辅助把持器100b以及第2辅助把持器100c的情况下,第3扭矩范围包括:例如20级的释放值。第3扭矩范围包括:第1释放值至第20释放值。
[0317]
作为第3扭矩范围的最大值的第20释放值小于作为第2扭矩范围的最大值的第30释放值。作为第2扭矩范围的最大值的第30释放值小于作为第1扭矩范围的最大值的第40释放值。
[0318]
马达控制部13s输出对马达8的旋转进行控制的控制信号。通过控制马达8的旋转来控制输出轴6的旋转。
[0319]
马达控制部13s对经由逆变电路71而从蓄电池12供给于马达8的线圈81d的电流进行监控。马达控制部13s基于从蓄电池12供给于马达8的线圈81d的电流,计算出作用于输出轴6的旋转负荷。
[0320]
<控制方法>
[0321]
图22是本实施方式的电动工具1g的控制方法的流程图。判定部13q接收装配传感器77的检测信号。判定部13q基于装配传感器77的检测信号,判定:在齿轮箱5是否装配有第1辅助把持器100b(步骤sg1)。
[0322]
在步骤sg1,判定为在齿轮箱5装配有第1辅助把持器100b的情况下(步骤sg1:yes),扭矩范围设定部13r将扭矩范围设定为第1扭矩范围(步骤sg2)。
[0323]
在步骤sg1,判定为在齿轮箱5未装配有第1辅助把持器100b的情况下(步骤sg1:no),判定部13q基于装配传感器77的检测信号,判定:在齿轮箱5是否装配有第2辅助把持器100c(步骤sg3)。
[0324]
在步骤sg3,判定为在齿轮箱5装配有第2辅助把持器100c的情况下(步骤sg3:yes),扭矩范围设定部13r将扭矩范围设定为第2扭矩范围(步骤sg4)。
[0325]
在步骤sg3,判定为在齿轮箱5未装配有第1辅助把持器100b以及第2辅助把持器100c的情况下(步骤sg3:no),扭矩范围设定部13r将扭矩范围设定为第3扭矩范围(步骤sg5)。
[0326]
作业者操作拨盘75,设定与使马达8的旋转停止下来的旋转负荷相关的释放值。拨盘75的操作信号被输出于扭矩范围设定部13r。扭矩范围设定部13r基于拨盘75的操作信号,设定释放值(步骤sg6)。
[0327]
在齿轮箱5装配有第1辅助把持器100b的情况下,即,扭矩范围被设定为第1扭矩范围的情况下,作业者能够设定:第1释放值至第40释放值的任意的释放值。在齿轮箱5装配有第2辅助把持器100c的情况下,即,在扭矩范围被设定为第2扭矩范围的情况下,作业者虽然能够设定第1释放值至第30释放值的任意的释放值,但无法设定:第31释放值至第40释放值的释放值。在齿轮箱5未装配有第1辅助把持器100b以及第2辅助把持器100c的情况下,即,在扭矩范围被设定为第3扭矩范围的情况下、作业者虽然能够设定第1释放值至第20释放值的任意的释放值,但无法设定第21释放值至第40释放值的释放值。
[0328]
当触发器式开关14被操作时,从触发器式开关14输出用于使马达8进行旋转的触发信号。马达控制部13s从触发器式开关14接收触发信号。马达控制部13s基于触发信号,将用于使马达8进行旋转的控制信号向逆变电路71输出(步骤sg7)。
[0329]
将电流从蓄电池12向马达8的线圈81d供给。马达控制部13s对经由逆变电路71而从蓄电池12供给于马达8的线圈81d的电流进行监控。马达控制部13s基于从蓄电池12供给于马达8的线圈81d的电流,计算出作用于输出轴6的旋转负荷。
[0330]
马达控制部13s判定:作用于输出轴6的旋转负荷是否已超过释放值(步骤sg8)。
[0331]
在步骤sg8,判定为作用于输出轴6的旋转负荷未超过释放值的情况下(步骤sg8:no),马达控制部13s使马达8的旋转继续下去。
[0332]
在步骤sg8,判定为作用于输出轴6的旋转负荷已超过释放值的情况下(步骤sg8:yes),马达控制部13s将用于使马达8的旋转停止的控制信号向逆变电路71输出(步骤sg9)。
[0333]
如以上所说明的那样,本实施方式的控制器13在判定为在电动工具1g未装配有第1辅助把持器100b以及第2辅助把持器100c的情况下,禁止设定第21释放值以上的较大的释放值。据此,作用于输出轴6的旋转负荷变大的情形得到抑制。所以,较大的反作用力作用于电动工具1f的情形得到抑制。
[0334]
控制器13在判定为在电动工具1a装配有第2辅助把持器100c的情况下,允许释放值被设定到第30释放值。在设定第30释放值那样大的释放值,并使用电动工具1g的作业中,即便是较大的反作用力作用于电动工具1g,作业者也能够通过对装配于电动工具1g的第2辅助把持器100c进行保持来接受作用于电动工具1g的反作用力。
[0335]
控制器13在判定为在电动工具1a装配有第1辅助把持器100b的情况下,允许释放值被设定到第40释放值。在设定第40释放值那样大的释放值,并使用电动工具1g的作业中,即便是较大的反作用力作用于电动工具1g,作业者也能够通过对装配于电动工具1g的第1辅助把持器100b进行保持来接受作用于电动工具1g的反作用力。
[0336]
[第8实施方式]
[0337]
说明第8实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0338]
<辅助把持器>
[0339]
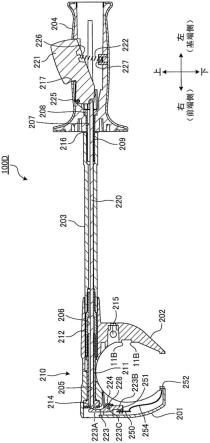
图23是本实施方式的辅助把持器100d的侧视图。图24是本实施方式的辅助把持器100d的剖视图。
[0340]
本实施方式的辅助把持器100d适用于:具有上述的第1实施方式所说明的装配传感器70的电动工具1a。本实施方式的装配传感器70检测:是否是辅助把持器100d已装配于电动工具1a的至少一部分、且辅助把持器100d的至少一部分被作业者握持。本实施方式的装配传感器70也可以不是磁性传感器。
[0341]
如图23以及图24所示,辅助把持器100d具有:第1臂部201、第2臂部202、杆部203、把持部204、以及管部209。第2臂部202相对于第1臂部201能够进行相对移动。
[0342]
第1臂部201以及第2臂部202分别装配于齿轮箱5。第1臂部201与第2臂部202能够在左右方向上相对移动。齿轮箱5被紧固在第1臂部201与第2臂部202之间。齿轮箱5通过第1臂部201与第2臂部202在左右方向上相对移动而被紧固。这样,辅助把持器100d装配于电动工具1a。
[0343]
杆部203沿着左右方向延伸。杆部203为管状。杆部203具有内部空间。杆部203连结于第2臂部202。第1臂部201配置在:比第2臂部202靠向右侧(前端侧)的位置。第2臂部202连结于杆部203的右端部(前端部)。杆部203的左侧的端面经由垫圈216而连接于把持部204的
右侧的端面。
[0344]
把持部204由作业者把持。把持部204具有内部空间。在把持部204的右端部(前端部)形成有贯通孔207。贯通孔207将把持部204的内部空间与外部空间连通。
[0345]
管部209为筒状。管部209的右部配置于杆部203的内侧。管部209的左部配置于把持部204的贯通孔207。在杆部203的左端部设置有螺母部208。螺母部208固定于把持部204的内表面。通过螺母部208,管部209与把持部204被固定。管部209与杆部203被固定。杆部203与把持部204借助管部209而被固定。
[0346]
辅助把持器100d具有:紧固机构210。紧固机构210使第1臂部201与第2臂部202相对移动。紧固机构210由作业者操作。通过操作紧固机构210,第1臂部201与第2臂部202以接近或者分离的方式进行相对移动。
[0347]
紧固机构210具有:管部211以及滑动部212。管部211固定于第1臂部201。滑动部212被支撑于第2臂部202。滑动部212能够与管部211进行相对移动。
[0348]
管部211为筒状。管部211的至少一部分配置于:设置在第1臂部201的贯通孔205。贯通孔205在第1臂部201的上部,沿着左右方向延伸。在管部211的右端部设置有螺母部214。螺母部214固定于贯通孔205的内表面。通过螺母部214,管部211与第1臂部201被固定。
[0349]
滑动部212为筒状。滑动部212配置于:设置在第2臂部202的贯通孔206。贯通孔206在第2臂部202的上部,沿着左右方向延伸。滑动部212的左端部固定于杆部203的右端部。在滑动部212的外表面设置有螺纹牙。在贯通孔206的内表面设置有螺纹沟。
[0350]
管部211的至少一部分配置于滑动部212的内侧。管部211与滑动部212能够在管部211的轴向上相对移动。第1臂部201与第2臂部202借助管部211以及滑动部212而被连结起来。
[0351]
作业者借助把持部204来操作紧固机构210。作业者以把持部204进行旋转的方式来操作把持部204。当把持部204被旋转时,杆部203以及滑动部212进行旋转。管部211固定于第1臂部201。因此,通过滑动部212进行旋转,第2臂部202在向第1臂部201接近的方向、或者从第1臂部201离开的方向上进行移动。
[0352]
另外,在第2臂部202设置有:供止动杆(未图示)插入的贯通孔215。
[0353]
在将辅助把持器100d装配于电动工具1a的情况下,作业者以第1臂部201与第2臂部202分离开的方式操作把持部204。作业者将齿轮箱5配置在第1臂部201与第2臂部202之间。
[0354]
在第1臂部201与第2臂部202之间配置有齿轮箱5的状态下,作业者以第1臂部201与第2臂部202接近的方式操作把持部204。据此,齿轮箱5被第1臂部201以及第2臂部202紧固。
[0355]
第2臂部202具有与齿轮箱5的卡合部9卡合的连结部11b。连结部11b包括与卡合部9的凹部啮合的凸部。卡合部9与辅助把持器100d的连结部11b卡合。
[0356]
图25是本实施方式的辅助把持器100d的把持部204的剖视图。图26是表示本实施方式的辅助把持器100d的第1臂部201的图。
[0357]
如图24~图26所示,辅助把持器100d具有:动作杆220、操作拨挡221、第1弹性部件222、动作拨挡223、以及第2弹性部件224。
[0358]
动作杆220的至少一部分被支撑于第1臂部201以及第2臂部202。动作杆220能够与
第1臂部201以及第2臂部202进行相对移动。动作杆220能够在左右方向上移动。
[0359]
动作杆220的一部分配置于管部211的内部空间。动作杆220的一部分配置于滑动部212的内部空间。动作杆220的一部分经由管部211而被支撑于第1臂部201。动作杆220的一部分经由滑动部212而被支撑于第2臂部202。动作杆220的一部分配置于杆部203的内部空间。动作杆220的一部分配置于管部209的内部空间。动作杆220的一部分配置于把持部204的内部空间。
[0360]
操作拨挡221配置于把持部204。操作拨挡221的一部分配置于:设置在把持部204的开口217。开口217形成为:将把持部204的内部空间与外部空间连通。操作拨挡221的一部分配置于把持部204的内部空间。操作拨挡221的一部分从把持部204的外表面突出。
[0361]
动作杆220的左端部(基端部)在把持部204的内部空间,与操作拨挡221的右端部相对置。
[0362]
操作拨挡221(第1枢轴)借助枢轴225以能够转动的方式而被支撑于把持部204。枢轴225配置于把持部204的内部空间。枢轴225将操作拨挡221的右端部与把持部204连结起来。在图25中,枢轴225配置在:比动作杆220的左端部靠向上方的位置。
[0363]
第1弹性部件222配置于把持部204的内部空间。第1弹性部件222分别连接于操作拨挡221以及把持部204。第1弹性部件222是螺旋弹簧。在图25中,第1弹性部件222的上端部连接于操作拨挡221的下部。第1弹性部件222的下端部连接于把持部204的内部空间的底部。在本实施方式中,在操作拨挡221的下部设置有凸部226。在把持部204的内部空间的底部设置有凹部227。第1弹性部件222的上端部被支撑于凸部226。第1弹性部件222的下端部被支撑于凹部227。
[0364]
第1弹性部件222在被压缩的状态下,配置于操作拨挡221与把持部204之间。第1弹性部件222以使得操作拨挡221从把持部204的内部空间出来的方式产生弹力(作用力)。
[0365]
动作拨挡223配置于第1臂部201的内侧。动作拨挡223以能够转动的方式借助枢轴228(第2枢轴)而被支撑于第1臂部201。如图24以及图26所示,动作拨挡223具有:上端部223a、下端部223b、以及中间部223c。上端部223a与动作杆220的右端面对置。中间部223c借助枢轴228而连结于第1臂部201。动作拨挡223以上端部223a向右方移动且下端部223b向左方移动的方式,以枢轴228为中心进行转动。动作拨挡223以上端部223a向左方移动且端部223b向右方移动的方式以枢轴228为中心进行转动。
[0366]
第2弹性部件224配置于第1臂部201的内侧。第2弹性部件224配置于枢轴228的周围。第2弹性部件224是扭簧。第2弹性部件224以使得动作拨挡223向一方转动的方式产生弹力(作用力)。第2弹性部件224以上端部223a向左方移动且下端部223b向右方移动的方式产生弹力。
[0367]
操作拨挡221在齿轮箱5被第1臂部201与第2臂部202紧固的状态下,能够进行移动。作业者通过握持把持部204来操作操作拨挡221。操作拨挡221在把持部204被作业者握持时进行移动。
[0368]
作业者以操作拨挡221向把持部204的内部空间移动的方式操作操作拨挡221。操作拨挡221以借助枢轴225能够转动的方式而被支撑于把持部204。当操作拨挡221以向把持部204的内部空间移动的方式被操作时,会以枢轴225为中心进行转动。操作拨挡221以操作拨挡221的右端部向右方移动的方式进行转动。
[0369]
通过操作拨挡221的移动,动作杆220进行移动。当操作拨挡221的右端部向右方移动时,动作杆220被操作拨挡221按压而向右方移动。
[0370]
通过操作拨挡221以及动作杆220的移动,动作拨挡223进行移动。当操作拨挡221的右端部向右方移动,使得动作杆220向右方移动时,动作拨挡223的上端部223a就会被动作杆220按压而向右方移动。于是,动作拨挡223以下端部223b向左方移动的方式进行转动。
[0371]
辅助把持器100d具有:控制基板250、手柄传感器251、信号输出部252、以及蓄电池253。
[0372]
控制基板250配置于第1臂部201的内侧。控制基板250被保持于第1臂部201。控制基板250分别连接于手柄传感器251以及信号输出部252。
[0373]
手柄传感器251配置于第1臂部201的内侧。手柄传感器251被支撑于控制基板250。
[0374]
手柄传感器251在齿轮箱5被第1臂部201与第2臂部202紧固的状态下,对把持部204是否已被作业者握持进行检测。
[0375]
本实施方式的手柄传感器251检测动作拨挡223的移动,并对把持部204是否已被作业者握持进行检测。手柄传感器251对动作拨挡223的下端部223b的移动进行检测。
[0376]
如上所述,当把持部204已被作业者握持时,操作操作拨挡221。当操作拨挡221向把持部204的内部空间移动时,动作杆220被操作拨挡221按压而向右方移动。据此,动作拨挡223以下端部223b向左方移动的方式进行转动。即,当把持部204被作业者握持时,下端部223b进行移动,下端部223b的位置发生变化。手柄传感器251通过检测下端部223b的位置来对把持部204已被作业者握持这一情况进行检测。手柄传感器251以非接触的方式对下端部223b进行检测。作为手柄传感器251,可以举出光电传感器。
[0377]
信号输出部252配置于第1臂部201的下端部。信号输出部252借助导线254而连接于控制基板250。另外,信号输出部252可以设置于第2臂部202的下端部,也可以分别设置于第1臂部201的下端部以及第2臂部202的下端部。信号输出部252配置于:在齿轮箱5被第1臂部201以及第2臂部202紧固之时能够与电动工具1a的装配传感器70对置的位置。
[0378]
信号输出部252基于手柄传感器251的检测信号,将表示把持部204已被作业者握持这一情况的手柄信号向电动工具1a的装配传感器70输出。
[0379]
蓄电池253将电力分别供给于控制基板250、手柄传感器251、以及信号输出部252。蓄电池253针对控制基板250、手柄传感器251、以及信号输出部252而分别发挥作为电源的功能。
[0380]
作业者通过握持把持部204,以操作拨挡221向把持部204的内部空间移动的方式来操作操作拨挡221。操作拨挡221借助枢轴225以能够转动的方式被支撑于把持部204。当操作拨挡221以向把持部204的内部空间移动的方式被操作时,操作拨挡221以枢轴225为中心进行转动。操作拨挡221以操作拨挡221的右端部向右方移动的方式进行转动。
[0381]
通过操作拨挡221的移动,动作杆220进行移动。当操作拨挡221的右端部向右方移动时,动作杆220被操作拨挡221按压而向右方移动。
[0382]
通过操作拨挡221以及动作杆220的移动,动作拨挡223进行移动。当操作拨挡221的右端部向右方移动,动作杆220向右方移动时,动作拨挡223的上端部223a被动作杆220按压而向右方移动。据此,动作拨挡223以下端部223b向左方移动的方式进行转动。
[0383]
手柄传感器251对动作拨挡223的下端部223b的移动进行检测。手柄传感器251通
过检测下端部223b的位置来对把持部204是否已被作业者握持进行检测。手柄传感器251通过检测已移动到左方的下端部223b的位置来对把持部204已被作业者握持这一情况进行检测。手柄传感器251的检测信号被发送于控制基板250。
[0384]
控制基板250在基于手柄传感器251的检测信号,判定为把持部204已被作业者握持的情况下,将使信号输出部252进行动作的控制信号发送给信号输出部252。
[0385]
信号输出部252基于来自控制基板250的控制信号,输出:表示把持部204已被作业者握持这一情况的手柄信号。装配传感器70接收来自信号输出部252的手柄信号。装配传感器70基于来自信号输出部252的手柄信号,对把持部204是否已被作业者握持进行检测。
[0386]
电动工具1a的控制器13基于装配传感器70的检测信号,输出对输出轴6的旋转进行控制的控制信号。装配传感器70的检测信号包括手柄信号。控制器13基于手柄信号,设定与输出轴6的旋转相关的阈值。控制器13基于阈值,输出对输出轴6的旋转进行控制的控制信号。控制器13基于表示把持部204已被作业者握持这一情况的手柄信号,将阈值设定为第1扭矩值。
[0387]
当操作拨挡221的操作被解除时,操作拨挡221以利用第1弹性部件222的弹力而从把持部204的内部空间向外侧移动的方式进行转动。操作拨挡221以操作拨挡221的右端部向左方移动的方式进行转动。据此,动作杆220利用第2弹性部件224的弹力而向左方移动。即,当操作拨挡221的右端部向左方移动时,来自操作拨挡221的力不会施加于动作杆220以及动作拨挡223。据此,动作拨挡223利用第2弹性部件224的弹力,以上端部223a向左方移动且下端部223b向右方移动的方式以枢轴228为中心进行转动。当动作拨挡223的上端部223a向左方移动时,动作杆220被上端部223a按压而向左方移动。
[0388]
手柄传感器251通过检测已移动到右方的下端部223b的位置来对操作拨挡221的操作已被解除这一情况进行检测。手柄传感器251的检测信号被发送于控制基板250。
[0389]
控制基板250在基于手柄传感器251的检测信号,判定为操作拨挡221的操作已被解除的情况下,将使信号输出部252的动作停止下来的控制信号发送给信号输出部252。
[0390]
信号输出部252基于来自控制基板250的控制信号,输出表示操作拨挡221的操作已被解除这一情况的手柄解除信号。装配传感器70接收来自信号输出部252的手柄解除信号。装配传感器70基于来自信号输出部252的手柄解除信号,对操作拨挡221的操作是否已被解除进行检测。
[0391]
电动工具1a的控制器13基于装配传感器70的检测信号,输出对输出轴6的旋转进行控制的控制信号。装配传感器70的检测信号包括手柄解除信号。控制器13基于手柄解除信号,将阈值设定为比第1扭矩值低的第2扭矩值。
[0392]
如以上所说明的那样,本实施方式的电动工具1a具有:检测是否是装配有辅助把持器100d、且辅助把持器100d的把持部204已被作业者握持的装配传感器70。控制器13基于装配传感器70所接收到的手柄信号或者手柄解除信号,输出对输出轴6的旋转进行控制的控制信号。即便辅助把持器100d装配于电动工具1a的至少一部分,控制器13在判定为把持部204未被作业者握持的情况下,也以作用于输出轴6的旋转负荷不变大的方式来控制输出轴6的旋转。因此,较大的反作用力作用于电动工具1a的情形得到抑制。控制器13在辅助把持器100d装配于电动工具1a的至少一部分、且判定为把持部204被作业者握持的情况下,以作用于输出轴6的旋转负荷变大的方式来控制输出轴6的旋转。作业者通过握持装配于电动
工具1a的辅助把持器100d的把持部204,能够接受作用于电动工具1a的反作用力。
[0393]
另外,在本实施方式中,控制基板250以及手柄传感器251也可以配置于第2臂部202。
[0394]
[第9实施方式]
[0395]
说明第9实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0396]
<辅助把持器>
[0397]
图27是本实施方式的辅助把持器100e的侧视图。图28是本实施方式的辅助把持器100e的把持部204的剖视图。
[0398]
在第8实施方式中,控制基板250以及手柄传感器251配置于第1臂部201。在本实施方式中,控制基板2500以及手柄传感器2510配置于把持部204。
[0399]
如图27所示,辅助把持器100e具有信号输出部252。与第8实施方式同样地,信号输出部252配置于第1臂部201的下端部。
[0400]
如图28所示,辅助把持器100e具有:操作拨挡2210、弹性部件2220、控制基板2500、以及手柄传感器2510。
[0401]
操作拨挡2210配置于把持部204。操作拨挡2210的一部分配置于:设置在把持部204的开口2170。开口2170将把持部204的内部空间与外部空间连通。操作拨挡2210的一部分配置于把持部204的内部空间。操作拨挡2210的一部分从把持部204的外表面突出。
[0402]
操作拨挡2210借助枢轴2250以能够转动的方式被支撑于把持部204。枢轴2250配置于把持部204的内部空间。枢轴2250将操作拨挡2210的左端部与把持部204连结起来。
[0403]
弹性部件2220配置于把持部204的内部空间。弹性部件2220分别连接于操作拨挡2210以及把持部204。弹性部件2220是螺旋弹簧。在图28中,弹性部件2220的上端部连接于操作拨挡2210的下部。弹性部件2220的下端部连接于把持部204的内部空间的底部。
[0404]
弹性部件2220在被压缩的状态下,配置于操作拨挡2210与把持部204之间。弹性部件2220以使得操作拨挡2210从把持部204的内部空间向外侧移动的方式产生弹力(作用力)。
[0405]
控制基板2500配置于把持部204的内部空间。控制基板2500被保持于把持部204。控制基板2500分别连接于手柄传感器2510以及信号输出部252。
[0406]
手柄传感器2510配置于把持部204的内部空间。手柄传感器2510被支撑于控制基板2500。
[0407]
手柄传感器2510检测操作拨挡2210的移动,并对把持部204是否已被作业者握持进行检测。本实施方式的手柄传感器2510对操作拨挡2210的右端部的移动进行检测。
[0408]
当把持部204被作业者握持,操作拨挡2210进行转动时,操作拨挡2210的右端部的位置会发生变化。手柄传感器2510通过检测操作拨挡2210的右端部的位置来对把持部204是否已被作业者握持进行检测。手柄传感器2510以非接触的方式对操作拨挡2210的右端部进行检测。在本实施方式中,在操作拨挡2210的右端部配置有永久磁铁2211。手柄传感器2510是磁性传感器。
[0409]
信号输出部252借助导线2540而连接于控制基板2500。导线2540的至少一部分配置于杆部203的内部空间。
[0410]
当把持部204被作业者握持时,操作拨挡2210向把持部204的内部空间移动。据此,操作拨挡2210以枢轴2250为中心进行转动。操作拨挡2210以操作拨挡2210的右端部向右方移动的方式进行转动。据此,手柄传感器2510与永久磁铁2211之间的距离变短。
[0411]
手柄传感器2510通过检测永久磁铁2211来对操作拨挡2210的右端部的位置进行检测。手柄传感器2510通过检测操作拨挡2210的右端部的位置来对把持部204是否已被作业者握持进行检测。手柄传感器2510通过检测已移动到右方的操作拨挡2210的右端部的位置来对把持部204已被作业者握持这一情况进行检测。手柄传感器2510的检测信号被发送于控制基板2500。
[0412]
控制基板2500在基于手柄传感器2510的检测信号,判定为把持部204已被作业者握持的情况下,将使信号输出部252进行动作的控制信号发送给信号输出部252。
[0413]
信号输出部252基于来自控制基板2500的控制信号,输出表示把持部204已被作业者握持这一情况的手柄信号。装配传感器70接收来自信号输出部252的手柄信号。电动工具1a的控制器13基于装配传感器70所接收到的手柄信号,输出对输出轴6的旋转进行控制的控制信号。
[0414]
当操作拨挡2210的操作被解除时,通过弹性部件2220的弹力,操作拨挡2210以从把持部204的内部空间向外侧移动的方式进行转动。操作拨挡2210以操作拨挡2210的右端部向左方移动的方式进行转动。
[0415]
手柄传感器2510检测操作拨挡2210的右端部的位置。手柄传感器2510通过检测已移动到左方的操作拨挡2210的右端部的位置来对操作拨挡2210的操作已被解除这一情况进行检测。手柄传感器2510的检测信号被发送于控制基板2500。
[0416]
控制基板2500在基于手柄传感器2510的检测信号,判定为操作拨挡2210的操作已被解除的情况下,将使信号输出部252的动作停止下来的控制信号发送给信号输出部252。
[0417]
信号输出部252基于来自控制基板2500的控制信号,输出表示操作拨挡2210的操作已被解除这一情况的手柄解除信号。装配传感器70接收来自信号输出部252的手柄解除信号。电动工具1a的控制器13基于装配传感器70所接收到的手柄解除信号,输出对输出轴6的旋转进行控制的控制信号。
[0418]
如以上所说明的那样,在本实施方式中,即便在电动工具1a装配有辅助把持器100d,在把持部204未被作业者握持的情况下,也以使得作用于输出轴6的旋转负荷不变大的方式来控制输出轴6的旋转。
[0419]
[第10实施方式]
[0420]
说明第10实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0421]
<辅助把持器>
[0422]
图29是本实施方式的辅助把持器100f的立体图。与上述的实施方式同样地,辅助把持器100f具有:配置于第1臂部201的下端部的信号输出部252。
[0423]
在本实施方式中,在把持部204的内部空间配置有手柄传感器260。手柄传感器260是光电传感器。另外,把持部204具有:将把持部204的内部空间与外部空间连通的开口2171。手柄传感器260配置成面对着开口2171。
[0424]
手柄传感器260检测:把持部204是否已被作业者握持。当把持部204被作业者握持
时,开口2171会被封堵住。此时,把持部204的外光不被输入于手柄传感器260。当把持部204未被作业者握持时,开口2171敞开。此时,把持部204的外光会被输入于手柄传感器260。手柄传感器260基于外光输入的有无来检测把持部204是否已被作业者握持。
[0425]
手柄传感器260的检测信号被发送于:设置在辅助把持器100f的控制基板(未图示)。控制基板基于手柄传感器260的检测信号,向信号输出部252输出控制信号。信号输出部252基于来自控制基板2500的控制信号,输出表示把持部204已被作业者握持这一情况的手柄信号。另外,信号输出部252基于来自控制基板2500的控制信号,输出表示把持部204未被作业者握持这一情况的手柄解除信号。
[0426]
如以上所说明的那样,在本实施方式中,即便在电动工具1a装配有辅助把持器100f,在把持部204未被作业者握持的情况下,也以使得作用于输出轴6的旋转负荷不变大的方式来控制输出轴6的旋转。
[0427]
[第11实施方式]
[0428]
说明第11实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0429]
<辅助把持器>
[0430]
图30是本实施方式的辅助把持器100g的侧视图。图31是本实施方式的辅助把持器100g的剖视图。图32是表示本实施方式的辅助把持器100g的把持部204的剖视图。图33是从左方观察本实施方式的辅助把持器100g而得到的图。
[0431]
本实施方式的辅助把持器100g是第8实施方式所说明的辅助把持器100d的变形例。与第8实施方式所说明的辅助把持器100d同样地,辅助把持器100d具有:第1臂部201、第2臂部202、杆部203、把持部2040、管部209、紧固机构210、动作杆220、动作拨挡223、以及第2弹性部件224。
[0432]
紧固机构210具有:管部211以及滑动部212。管部211固定于第1臂部201。滑动部212能够与管部211进行相对移动。与第8实施方式所说明的辅助把持器100d同样地,当作业者旋转把持部2040时,第2臂部202在向第1臂部201接近的方向、或者从第1臂部201离开的方向上进行移动。
[0433]
与第8实施方式所说明的辅助把持器100d同样地,通过动作杆220向右方移动,动作拨挡223以上端部223a向右方移动、且下端部223b向左方移动的方式进行转动。另外,通过动作杆220向左方移动,利用第2弹性部件224的弹力,动作拨挡223以上端部223a向左方移动、且下端部223b向右方移动的方式进行转动。
[0434]
另外,与第8实施方式所说明的辅助把持器100d同样地,在第1臂部201的内侧配置有控制基板250以及手柄传感器251。另外,在第1臂部201的下端部配置有信号输出部252。另外,手柄传感器251对动作拨挡223的下端部223b进行检测。另外,当动作拨挡223的下端部223b移动到左方时,从信号输出部252输出手柄信号。另外,当动作拨挡223的下端部223b移动到右方时,从信号输出部252输出手柄解除信号。
[0435]
在第8实施方式中,通过操作操作拨挡221,动作杆220向右方移动。本实施方式的辅助把持器100g不具有操作拨挡221。在本实施方式中,在辅助把持器100g装配于电动工具1a的至少一部分的状态下,通过由作业者对把持部2040进行转动,动作杆220会向右方移动。
[0436]
把持部2040在电动工具1a的齿轮箱5被第1臂部201与第2臂部202紧固的状态下,沿着旋转方向移动。把持部2040在电动工具1a的齿轮箱5被第1臂部201与第2臂部202紧固的状态下,相对于第1臂部201以及第2臂部202能够转动。
[0437]
本实施方式的把持部2040具有:前端侧把持部2041以及基端侧把持部2042。前端侧把持部2041配置在:比基端侧把持部2042靠向右侧(前端侧)的位置。在辅助把持器100g装配于电动工具1a的状态下,作业者以扭转把持部2040的方式进行操作。把持部2040通过作业者的扭转操作而进行转动。据此,动作杆220向右方移动。
[0438]
辅助把持器100e具有:柱状部件230、管部件231、螺母232、滚珠233、滑动部件234、以及弹性部件235。
[0439]
柱状部件230固定于动作杆220的左端部。在本实施方式中,柱状部件230与动作杆220呈一体。在柱状部件230的表面设置有螺旋状的槽236。
[0440]
管部件231配置于柱状部件230的周围。柱状部件230的至少一部分配置于管部件231的内侧。管部件231的右端部固定于前端侧把持部2041。
[0441]
螺母232配置于管部件231的周围。螺母232固定于管部件231。
[0442]
滚珠233配置于:设置在管部件231的一部分的孔237。孔237贯穿管部件231的内表面和外表面。滚珠233被保持于螺母232。螺母232的内表面与滚珠233相对置。滚珠233的一部分配置于槽236。滚珠233在槽236中移动。
[0443]
滑动部件234固定于柱状部件230的左端部。如图33所示,滑动部件234具有:圆环部2341以及凸部2342。圆环部2341配置于柱状部件230的周围。凸部2342从圆环部2341向径向外侧突出。圆环部2341固定于柱状部件230。在圆环部2341的周围隔开间隔地设置4个凸部2342。
[0444]
在基端侧把持部2042的内表面形成有引导槽238。引导槽238沿着左右方向延伸。凸部2342的至少一部分配置于引导槽238。引导槽238将凸部2342沿着左右方向进行引导。通过凸部2342配置于引导槽238,基端侧把持部2042与滑动部件234之间的相对旋转得到抑制。
[0445]
另外,在滑动部件234的左端部配置有弹性卡环240。弹性卡环240抑制:滑动部件234从基端侧把持部2042的内部空间脱出。
[0446]
弹性部件235配置于管部件231的内侧。弹性部件235是螺旋弹簧。弹性部件235包围动作杆220。弹性部件235的右端部被支撑于:在管部件231的右端部设置的支撑部239的左面。弹性部件235的左端部被支撑于柱状部件230的右端面。弹性部件235在被压缩的状态下,配置于支撑部239的左面与柱状部件230的右端面之间。
[0447]
在第1臂部201与第2臂部202之间配置有齿轮箱5的状态下,通过旋转把持部2040,第1臂部201与第2臂部202接近,齿轮箱5被紧固。此后,把持部2040被进一步扭转操作时,管部件231在把持部2040的内侧进行转动。
[0448]
滚珠233配置于管部件231的孔237中。滚珠233被保持于管部件231。另外,滚珠233的一部分配置于柱状部件230的槽236。因此,当管部件231进行转动时,柱状部件230被滚珠233拉拽而向右方移动。
[0449]
滑动部件234的凸部2342配置于引导槽238。另外,柱状部件230与滑动部件234被固定。因此,把持部2040与柱状部件230以及滑动部件234之间的相对旋转得到抑制。
[0450]
当柱状部件230向右方移动时,固定于柱状部件230的滑动部件234也向右方移动。滑动部件234一边被引导槽238引导一边向右方移动。由于滑动部件234被引导槽238引导,因此,柱状部件230不转动地向右方移动。
[0451]
当柱状部件230向右方移动时,固定于柱状部件230的动作杆220会向右方移动。而且,与第8实施方式同样地,动作拨挡223以上端部223a向右方移动且下端部223b向左方移动的方式进行转动。当下端部223b向左方移动时,从信号输出部252输出手柄信号。
[0452]
当把持部2040的扭转操作被解除时,通过弹性部件235的弹力,柱状部件230向左方移动。而且,动作杆220向左方移动。另外,当柱状部件230向左方移动时,管部件231被滚珠233拉拽而进行转动。当动作杆220向左方移动时,与第8实施方式同样地,动作拨挡223通过第2弹性部件224的弹力,以上端部223a向左方移动且下端部223b向右方移动的方式进行转动。当动作拨挡223的下端部223b向右方移动时,从信号输出部252输出手柄解除信号。
[0453]
如以上所说明的那样,根据本实施方式,把持部2040的至少一部分被扭转操作,使得把持部2040进行转动,由此,动作杆220以及动作拨挡223进行移动。
[0454]
[第12实施方式]
[0455]
说明第12实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0456]
<辅助把持器>
[0457]
图34是本实施方式的辅助把持器100h的把持部204的剖视图。
[0458]
在本实施方式中,在把持部204的内部空间配置手柄传感器262。手柄传感器262是压力传感器。在把持部204的内部空间的上表面设置有凸部2043。凸部2043从把持部204的内部空间的上表面向下方突出。凸部2043是橡胶制的。凸部2043的外表面构成把持部204的表面的一部分。凸部2043的下表面与手柄传感器262接触。
[0459]
手柄传感器262对把持部204是否已被作业者握持进行检测。当把持部204已被作业者握持时,通过凸部2043而对手柄传感器262施加外力。手柄传感器262通过检测从凸部2043施加的外力,来对把持部204是否已被作业者握持进行检测。
[0460]
手柄传感器262的检测信号经由导线2542而被发送于设置在辅助把持器100h的控制基板(未图示)。与上述的实施方式同样地,辅助把持器100h具有:配置于第1臂部201的下端部的信号输出部252。控制基板基于手柄传感器262的检测信号,向信号输出部252输出控制信号。
[0461]
在手柄传感器262检测到了把持部204已被作业者握持的情况下,信号输出部252输出手柄信号。另外,手柄传感器262检测到把持部204未被作业者握持的情况下,信号输出部252输出手柄解除信号。
[0462]
如以上所说明的那样,在本实施方式中,即便在电动工具1a装配有辅助把持器100h,但把持部204未被作业者握持的情况下,以使得作用于输出轴6的旋转负荷不变大的方式来控制输出轴6的旋转。
[0463]
[第13实施方式]
[0464]
说明第13实施方式。在以下的说明中,针对与上述的实施方式相同、或者等同的构成要素,赋予同一附图标记,并对其说明进行简略或省略。
[0465]
图35是本实施方式的辅助把持器100i的立体图。图36是本实施方式的辅助把持器
100i的第2臂部202的剖视图。
[0466]
与上述的实施方式同样地,辅助把持器100i具有:与齿轮箱5的卡合部9卡合的连结部11b。连结部11b设置于第2臂部202。
[0467]
在本实施方式中,在连结部11b配置有手柄传感器264。手柄传感器264是压力传感器。
[0468]
在辅助把持器100i装配于电动工具1a的至少一部分的状态下,输出轴6进行旋转而实施了作业的情况下,如果把持部204被作业者握持,则较大的扭矩作用于辅助把持器100i。因此,由手柄传感器264检测到的压力会变大。另一方面,即便输出轴6进行旋转而实施作业,在把持部204未被作业者握持的情况下,由手柄传感器264检测到的压力不会变大。所以,手柄传感器264在输出轴6进行旋转的状态下,对把持部204是否被作业者握持进行检测。
[0469]
手柄传感器264的检测信号被发送于:设置在辅助把持器100i的控制基板(未图示)。辅助把持器100i具有:配置于第1臂部201下端部的信号输出部252。控制基板基于手柄传感器264的检测信号,向信号输出部252输出控制信号。
[0470]
手柄传感器264检测到了把持部204已被握持的情况下,信号输出部252输出手柄信号。在本实施方式中,电动工具1a的控制器13基于手柄信号,在输出轴6进行旋转的状态下,使阈值渐渐地上升。在手柄传感器264检测到把持部204未被握持的情况下,信号输出部252输出手柄解除信号。电动工具1a的控制器13基于手柄解除信号,在输出轴6进行旋转的状态下,使阈值渐渐地降低。
[0471]
如以上所说明的那样,本实施方式的手柄传感器264在输出轴6进行旋转而开始电动工具1a的作业之后,对把持部204是否被作业者握持进行检测。在本实施方式中,即便在电动工具1a装配有辅助把持器100i,在把持部204未被作业者握持的情况下,也以使得作用于输出轴6的旋转负荷不变大的方式来控制输出轴6的旋转。
[0472]
<变形例>
[0473]
另外,在上述的实施方式中,动作拨挡223(2230)也可以借助枢轴以能够转动的方式被支撑于第2臂部202。
[0474]
[其他的实施方式]
[0475]
在上述的实施方式中,虽然卡合部9设置于齿轮箱5,但卡合部9也可以设置于马达收纳部2a。卡合部9也可以设置于例如马达收纳部2a的侧部。
[0476]
在上述的实施方式中,卡合部9既可以设置于模式切换环17的前方,也可以设置于切换环18的前方。即,只要卡合部9设置于电动工具的至少一部分即可。
[0477]
在上述的实施方式中,模式切换环17与切换环18也可以为一体。即,也可以通过1个环,来进行:作业模式的切换、以及对传递给输出轴6的动力予以切断的释放值的设定。
[0478]
附图标记说明
[0479]
1a
…
电动工具,1b
…
电动工具,1c
…
电动工具,1d
…
电动工具,1e
…
电动工具,1f
…
电动工具,1g
…
电动工具,2
…
外壳,2a
…
马达收纳部,2b
…
手柄部,2c
…
控制器收纳部,3
…
后罩,4a
…
吸气口,4b
…
排气口,5
…
齿轮箱,5a
…
第1齿轮箱,5b
…
第2齿轮箱,5c
…
凸部,5d
…
螺纹孔,6
…
输出轴,7
…
蓄电池装配部,8
…
马达,9
…
卡合部,9l
…
左卡合部,9r
…
右卡合部,10
…
动力传递机构,11
…
连结部,12
…
蓄电池,12c
…
解除按钮,13
…
控制器,13a
…
判
定部,13b
…
阈值设定部,13c
…
马达控制部,13d
…
判定部,13e
…
致动器控制部,13f
…
判定部,13g
…
阈值设定部,13h
…
马达控制部,13i
…
判定部,13j
…
扭矩范围设定部,13k
…
马达控制部,13l
…
判定部,13m
…
马达控制部,13n
…
判定部,13o
…
阈值设定部,13p
…
马达控制部,13q
…
判定部,13r
…
扭矩范围设定部,13s
…
马达控制部,14
…
触发器式开关,14a
…
触发器式部件,14b
…
开关主体,15
…
正反切换拨挡,16
…
速度切换拨挡,17
…
模式切换环,17a
…
操作环,17b
…
凸轮环,18
…
切换环,19
…
照明灯,20
…
减速机构,21
…
第1行星齿轮机构,21c
…
第1齿轮架,21p
…
行星齿轮,21r
…
内齿轮,21s
…
小齿轮,22
…
第2行星齿轮机构,22c
…
第2齿轮架,22p
…
行星齿轮,22r
…
内齿轮,22s
…
太阳齿轮,23
…
第3行星齿轮机构,23c
…
第3齿轮架,23p
…
行星齿轮,23r
…
内齿轮,23s
…
太阳齿轮,24
…
速度切换环,25
…
结合环,30
…
振动机构,31
…
第1凸轮,32
…
第2凸轮,33
…
振动切换拨挡,33a
…
对置部,34
…
螺旋弹簧,40
…
离合器机构,41
…
弹簧保持器,42
…
螺旋弹簧,43
…
垫圈,45
…
连结环,61
…
主轴,62
…
卡盘,63
…
轴承,64
…
轴承,70
…
装配传感器,71
…
逆变电路,72
…
致动器,73
…
连结部件,74
…
加速度传感器,75
…
拨盘,76
…
位置传感器,,77
…
装配传感器,81
…
定子,81a
…
定子铁芯,81b
…
前绝缘子,81c
…
后绝缘子,81d
…
线圈,81e
…
传感器电路基板,81f
…
结线部件,82
…
转子,82a
…
转子轴,82b
…
转子铁芯,82c
…
永久磁铁,83
…
轴承,84
…
轴承,85
…
离心风扇,100a
…
辅助把持器,100b
…
第1辅助把持器,100c
…
第2辅助把持器,101
…
第1臂部,102
…
第2臂部,103
…
杆部,103a
…
小径部,103b
…
大径部,104
…
把持部,105
…
贯通孔,106
…
贯通孔,107
…
贯通孔,108
…
螺母,100d
…
辅助把持器,100e
…
辅助把持器,100f
…
辅助把持器,100g
…
辅助把持器,100h
…
辅助把持器,100i
…
辅助把持器,110
…
紧固机构,111
…
杆部,112
…
滑动部,113
…
引导部,114
…
螺母,115
…
贯通孔,116
…
拨盘,117
…
永久磁铁,118
…
杆部,118b
…
大径部,118c
…
螺纹部,119
…
把持部,201
…
第1臂部,202
…
第2臂部,203
…
杆部,204
…
把持部,205
…
贯通孔,206
…
贯通孔,207
…
贯通孔,208
…
螺母部,209
…
管部,210
…
紧固机构,211
…
管部,212
…
滑动部,214
…
螺母部,215
…
贯通孔,216
…
垫圈,217
…
开口,220
…
动作杆(动作部),221
…
操作拨挡(操作部),222
…
第1弹性部件,223
…
动作拨挡(动作部),223a
…
上端部,223b
…
下端部,223c
…
中间部,224
…
第2弹性部件,225
…
枢轴,226
…
凸部,227
…
凹部,228
…
枢轴,230
…
柱状部件,231
…
管部件,232
…
螺母,233
…
滚珠,234
…
滑动部件,2341
…
圆环部,2342
…
凸部,235
…
弹性部件,236
…
槽,237
…
孔,238
…
引导槽,239
…
支撑部,240
…
弹性卡环,250
…
控制基板,251
…
手柄传感器,252
…
信号输出部,253
…
蓄电池,254
…
导线,260
…
手柄传感器,262
…
手柄传感器,264
…
手柄传感器,2170
…
开口,2171
…
开口,2210
…
操作拨挡,2211
…
永久磁铁2250
…
枢轴,2220
…
弹性部件,2040
…
把持部,2041
…
前端侧把持部,2042
…
基端侧把持部,2043
…
凸部,2500
…
控制基板,2510
…
手柄传感器,2540
…
导线,2542
…
导线,ax
…
旋转轴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1