用于训练机器人的方法和系统与流程
背景技术:
1、本发明总体涉及机器人,并且更具体地,涉及定义工作区中的对象和对象上的夹持位置。
2、对象交互,诸如拾取和操纵,是大多数机器人任务的核心。在操作中,机器人需要知道在哪里找到感兴趣的对象以及如何处理该对象,例如在哪里以及如何夹持它。传统的机器人编程由专家使用专门的编程语言和操作系统来完成。这些工具需要深入理解机器人及其能力。因此,在常规的机器人编程中,专家的任务是定义对象的位置和/或夹持信息,通常是以相对于机器人的机器人工作区中的坐标的形式。
3、尽管用于机器人的对象定义和编程机器人的夹持器与对象之间的交互对于使用机器人是必要的,但是这样的任务是耗时的并且通常需要专业知识。许多机器人任务涉及对象夹持和对象的一些物理操作,例如放置和/或操纵对象。然而,机器人是通过低级命令来控制,典型地是以具体的且专门的编程语言。这种机器人编程语言通常是为专家级用户设计的。
4、因此,用于定义工作区对象和其上夹持位置的改进的方法和系统将是有用的。
技术实现思路
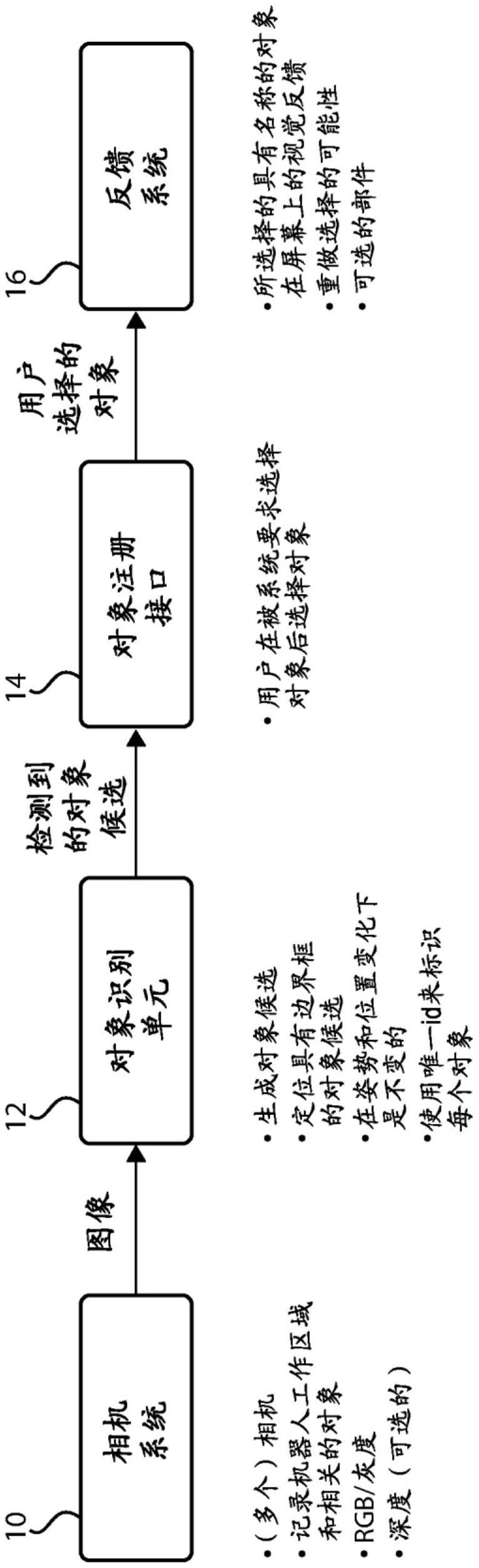
1、描述了一种方法和系统,用于训练机器人系统来识别工作区中的对象和用于对象的夹持信息。对象可以由用户使用触摸屏、使用工作区中的手势或使用基于语言的输入来标识。可以使用反馈以确认机器人系统已经识别出用户想要选择的对象。用户还可以训练机器人系统来识别夹持信息,该夹持信息是用户想要机器人在夹持所识别的对象时使用。本发明还可以包括以下书面描述或在附图中描述的任何其它方面及其任意组合。
2、此外,提供了一种被配置用于由用户根据本文描述的任何方法来训练机器人系统的系统。该系统包括:确定模块,所述确定模块被配置用于由机器人系统在机器人的工作区内确定候选的对象;显示模块,所述显示模块被配置用于向用户显示候选的对象;以及身份学习模块,所述身份学习模块被配置用于接收用户的识别输入,该输入指示候选的对象是否与预期的对象匹配。此外,提供了根据本文描述的任何方法的用于由用户训练机器人系统的系统的用途。
技术特征:
1.一种由用户训练机器人系统的方法,包括:
2.根据权利要求1所述的方法,还包括:
3.根据前述权利要求中任一项所述的方法,其中候选的所述对象(30)利用高亮或围绕候选的所述对象(30)的边界线(32)被显示在显示器屏幕(18)上。
4.根据前述权利要求中任一项所述的方法,还包括由所述用户向所述机器人系统标识所述机器人的所述工作区内的包括预期的所述对象(30)的区域,其中所述机器人系统将来自所述区域的候选的所述对象(30)确定为可能对应于预期的所述对象(30)。
5.根据前述权利要求中任一项所述的方法,其中候选的所述对象(30)被显示在触摸屏(18)上的所述工作区的图像内,并且所述用户通过触摸所述触摸屏(18)来标识预期的所述对象(30)。
6.根据权利要求1-4所述的方法,其中所述用户通过在所述工作区内做手势(20)来标识预期的所述对象(30)。
7.根据权利要求6所述的方法,其中所述做手势(20)包括所述用户将手或手指(36)定位在所述工作区内,所述机器人系统确定所述手或手指(36)的位置和/或取向以确定候选的所述对象(30)。
8.根据权利要求6所述的方法,其中所述做手势(20)包括所述用户将杆(38)定位在所述工作区内,所述机器人系统确定所述杆(38)的位置和/或取向以确定候选的所述对象(30)。
9.根据权利要求8所述的方法,其中所述杆(38)物理地不连接到所述机器人系统。
10.根据权利要求7-9所述的方法,其中所述机器人系统视觉跟踪所述手或手指(36)或所述杆(38)的位置和/或取向。
11.根据权利要求8-9所述的方法,其中所述杆(38)包括imu,并且将所述位置和/或取向无线传输给所述机器人系统。
12.根据权利要求1-4所述的方法,其中所述用户利用字(40)标识预期的所述对象(30)。
13.根据前述权利要求中任一项所述的方法,还包括由所述用户向所述机器人系统标识预期的所述对象(30)上的夹持位置(42)。
14.根据权利要求13所述的方法,还包括向所述用户显示所述夹持位置(42)。
15.根据前述权利要求中任一项所述的方法,还包括由所述用户向所述机器人系统标识要被施加到预期的所述对象(30)的夹持力(42)。
技术总结
提供了用于训练机器人以识别机器人的工作区中的对象的方法和系统。工作区中的对象由用户标识,并且机器人确定候选对象。反馈可以被使用以便用户确认由机器人系统确定的候选对象是否与用户预期的对象匹配。用于对象的夹持信息也可以由用户标识以训练机器人如何夹持该对象。
技术研发人员:桑德罗·舍博恩,安德烈·丹,罗伯特·里内·玛丽亚·伯克,菲利普·索默,托马斯·洛克
受保护的技术使用者:ABB瑞士股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!