远程操作系统的制作方法
本公开涉及一种用于在远离边缘设备的场所的人对边缘设备进行操作的远程操作系统。
背景技术:
1、专利文献1公开了检测用于对多关节机器人进行远程操作的操作者的手指的动作的动作检测装置。以往,已知由操作员通过线控来对边缘设备进行操作的远程操作系统。以往的远程操作系统通过将边缘设备的活动环境中的力触觉信息传递给操作员来有助于提高操作员的操作性及临场感。
2、专利文献1:国际公开第2019/224994号
技术实现思路
1、发明要解决的问题
2、以往的远程操作系统以物理上的力将边缘设备的力触觉信息反馈给操作员。因此,在以往的远程操作系统中,在操作员的操作接口中需要驱动部,存在操作装置大型化及复杂化这样的问题。
3、本公开是鉴于上述情况而完成的,目的在于得到避免操作装置大型化及复杂化的远程操作系统。
4、用于解决问题的方案
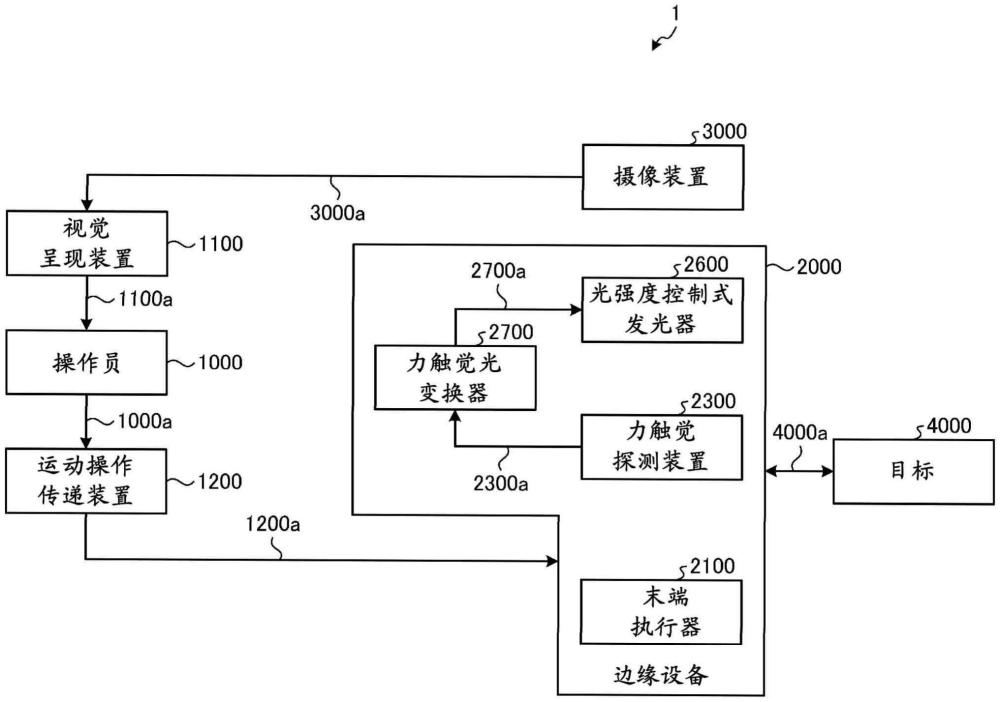
5、为了解决上述的问题并达到目的,本公开所涉及的远程操作系统具有:边缘设备,与目标接触;运动操作传递装置,受理用于对边缘设备进行操作的操作员操作并将与操作员操作对应的运动传递信息输出到边缘设备;以及视觉显示装置,显示目标及边缘设备的影像。边缘设备具有:力触觉探测装置,探测对目标的力触觉;力触觉光变换器,将由力触觉探测装置探测出的力触觉变换为确定与探测出的力触觉的大小对应的光的强度的信号;以及光强度控制式发光器,发出与通过力触觉光变换器得到的信号对应的强度的光。
6、发明的效果
7、本公开所涉及的远程操作系统起到能够避免操作装置大型化及复杂化这样的效果。
技术特征:
1.一种远程操作系统,其特征在于,具备:
2.一种远程操作系统,其特征在于,具备:
3.根据权利要求2所述的远程操作系统,其特征在于,
4.根据权利要求2或3所述的远程操作系统,其特征在于,
5.根据权利要求2至4中的任一项所述的远程操作系统,其特征在于,
6.一种远程操作系统,其特征在于,具备:
7.根据权利要求1所述的远程操作系统,其特征在于,
8.根据权利要求2至5中的任一项所述的远程操作系统,其特征在于,
9.根据权利要求6所述的远程操作系统,其特征在于,
10.根据权利要求2至9中的任一项所述的远程操作系统,其特征在于,
技术总结
远程操作系统(1)具有:边缘设备(2000),与目标(4000)接触;运动操作传递装置(1200),受理用于对边缘设备(2000)进行操作的操作员操作(1000a)并将运动传递信息(1200a)输出到边缘设备(2000);以及视觉呈现装置(1100),显示目标(4000)及边缘设备(2000)的影像。边缘设备(2000)具有:力触觉探测装置(2300),探测对目标(4000)的力触觉;力触觉光变换器(2700),将由力触觉探测装置(2300)探测出的力触觉变换为确定光的强度的光强度信号(2700a);以及光强度控制式发光器(2600),发出与光强度信号(2700a)对应的强度的光。
技术研发人员:春名正树
受保护的技术使用者:三菱电机株式会社
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!