具备线缆配线构造的工业用机器人的制作方法
本发明涉及具备线缆配线构造的工业用机器人。
背景技术:
1、在垂直多关节机器人等具备多个臂的工业用机器人中,驱动该机器人的各臂的马达用线缆等线缆沿着臂的外表面配设。在这样的机器人中,公知有如下技术:在臂形成槽、凹部,并将线缆配置在该槽、凹部内,以在各臂动作时防止线缆与臂互相干扰、线缆破损(参照例如专利文献1-4)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开平07-100787号公报
5、专利文献2:日本特开2018-122336号公报
6、专利文献3:日本特开2018-015872号公报
7、专利文献4:日本特开2018-192607号公报
技术实现思路
1、发明要解决的问题
2、在机器人的第1臂(上臂等)与以转动自如的方式安装于第1臂的第2臂(前臂等)之间配设线缆时,存在如下情况:尽量利用夹持件等将线缆安装于第2臂的前方,以避免该线缆与其他构件之间的互相干扰。在该情况下,存在机器人的外观劣化、线缆暴露长度变长等问题,因此,在第2臂形成槽并将线缆收容于该槽内的做法有效。
3、然而,在工业用机器人中,在第2臂的基部设置有多个马达、分线盘等、应将多个线缆分别与不同的对象连接的情况较多。在这样的机器人中,在将线缆收容于槽的情况下,根据线缆连接对象的位置的不同,存在使从槽引出的线缆较大程度地弯曲而朝向连接对象引绕等、对线缆施加过大的负载的情况。
4、用于解决问题的方案
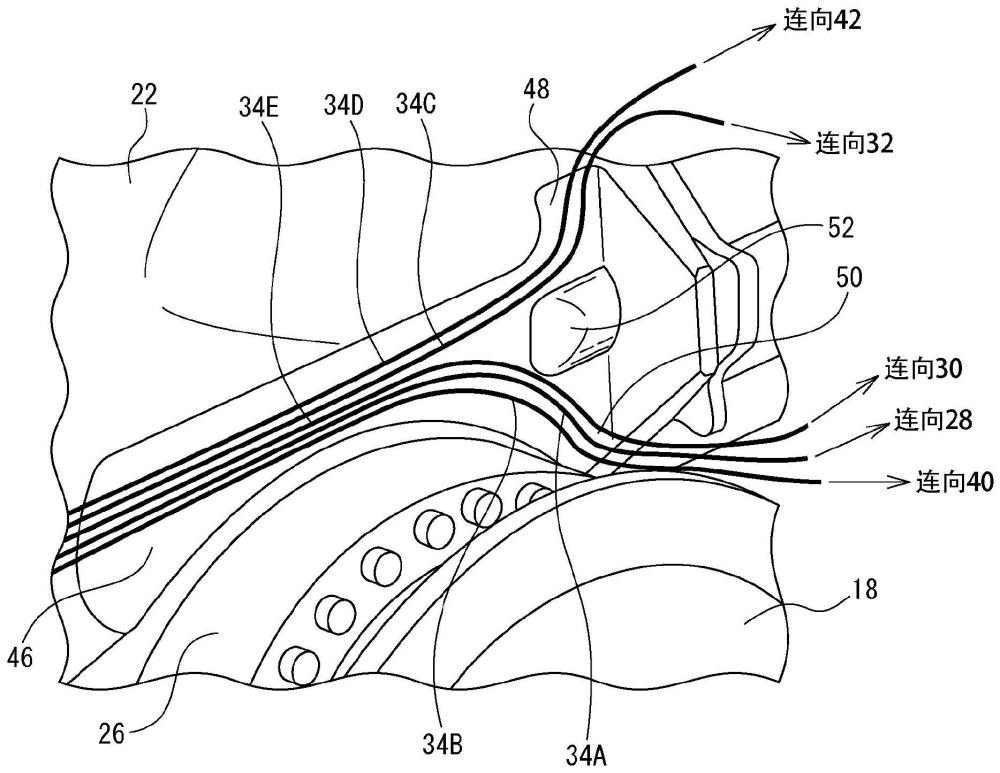
5、本公开的一技术方案是一种工业用机器人,其具有:第1臂;第2臂,其以相对于所述第1臂转动自如的方式安装于该第1臂;以及至少1根线缆,其配设在所述第1臂与所述第2臂之间,其中,该工业用机器人具有槽,该槽形成于所述第2臂的侧面,构成为收容所述线缆,所述槽具有:第1宽幅部,其向相对于所述线缆的长度方向而言的宽度方向扩展;和第2宽幅部,其向与所述第1宽幅部不同的方向扩展。
6、发明的效果
7、根据本公开,在第2臂形成的槽具备宽幅部,从而能够将槽内的线缆向多个方向中的任一方向选择性地引出。因而,即使在线缆的连接对象存在多个的情况下,也能够相对于任一连接对象都以不对线缆施加过度的负载的方式顺利地引绕。
技术特征:
1.一种工业用机器人,其具有:第1臂;第2臂,其以相对于所述第1臂转动自如的方式安装于该第1臂;以及至少1根线缆,其配设在所述第1臂与所述第2臂之间,其中,
2.根据权利要求1所述的工业用机器人,其中,
3.根据权利要求1或2所述的工业用机器人,其中,
4.根据权利要求1~3中任一项所述的工业用机器人,其中,
5.根据权利要求4所述的工业用机器人,其中,
6.根据权利要求1~5中任一项所述的工业用机器人,其中,
7.根据权利要求1~6中任一项所述的工业用机器人,其中,
技术总结
提供一种具备提高线缆连接对象的配置自由度的线缆配线构造的工业用机器人。工业用机器人具有:第1臂;第2臂,其以相对于第1臂转动自如的方式安装于第1臂;以及至少1根线缆,其配设在第1臂与第2臂之间。机器人还具有槽,该槽形成于第2臂的侧面,构成为收容线缆,所述槽具有:第1宽幅部,其向相对于所述第2臂的长度方向而言的宽度方向扩展并且形成为能够引出所述线缆;和第2宽幅部,其向与所述第1宽幅部不同的方向扩展并且形成为能够引出所述线缆。
技术研发人员:杉原恭,宫崎元贵
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!