一种晶圆传输用桁架机械手的制作方法
本发明涉及晶圆运输,特别涉及一种晶圆传输用桁架机械手。
背景技术:
1、在晶圆制造的精密流程中,良品率的高低是衡量生产效率和质量的关键指标。而决定良品率的因素众多,除了工艺腔室的设计、硬件条件以及工艺参数等核心要素外,晶圆在产线中的传输过程同样占据举足轻重的地位。特别是晶圆在传输过程中可能出现的滑片现象,对良品率有着至关重要的影响。
2、滑片现象,是指在晶圆传输过程中,由于除加持力或吸附力之外的不当外力作用,导致晶圆与传输工具之间发生相对位置的变动。这种变动可能是瞬时的,也可能是持续的,但无论何种形式,都可能导致晶圆表面损伤、污染甚至碎裂。滑片的发生往往与传输系统的稳定性、表面摩擦系数、以及外部环境因素等有关。
3、为此,提出一种晶圆传输用桁架机械手。
技术实现思路
1、有鉴于此,本发明实施例希望提供一种晶圆传输用桁架机械手,以解决或缓解现有技术中存在的技术问题,即如何通过优化运输装置的受力结构,避免对晶圆的运输过程中产生滑片现象,并对此至少提供一种有益的选择;
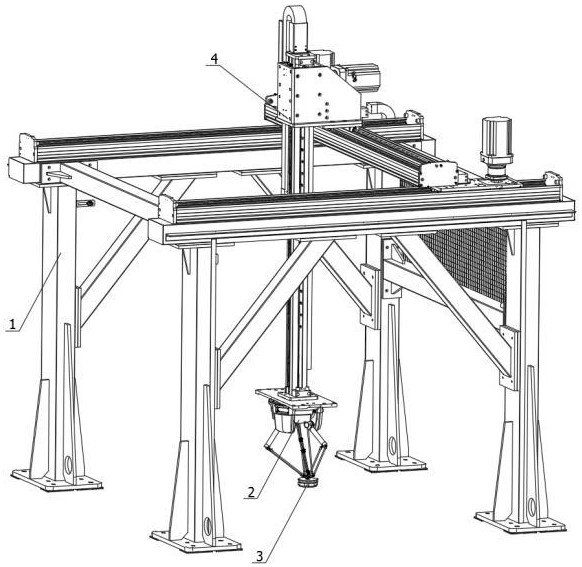
2、本发明实施例的技术方案是这样实现的:一种晶圆传输用桁架机械手,该晶圆传输用桁架机械手主要由x-y-z线性模组4和机械手装置3构成。x-y-z线性模组4负责驱动机械手装置3在三维空间内沿x、y或/和z轴方向进行精确的位置调节。这种调节机制确保了机械手可以准确地到达工作空间内的任何指定位置。机械手装置3下方装有esc吸盘3,用于吸附并固定晶圆。esc吸盘3的四周环绕着多组缓冲臂模组202和衔接臂模组203,它们以并联的形式排布,形成多个封闭的运动链。这种并联结构不仅增强了机械手的稳定性,还为晶圆提供了多重保护。
3、其中在一种实施方式中:还包括按晶圆运输路径布置的桁架体1,所述桁架体1上搭载有所述x-y-z线性模组4。
4、其中在一种实施方式中:机械手装置3包括一个机壳201,作为整个装置的支撑和保护结构。机壳201内部固设有光轴2021,这是缓冲臂模组202的核心部件之一。缓冲臂模组202还包括套轴2022,它套设于光轴2021外部,并与光轴2021转动配合。这种转动配合的设计允许套轴2022在受到外力作用时能够相对于光轴2021进行旋转,从而实现缓冲和减震的效果。
5、为了进一步增强缓冲效果,缓冲臂模组202中还设有扭簧。这个扭簧套设于光轴2021和套轴2022的内部,并对套轴2022进行弹性蓄力。当外力作用在套轴2022上时,扭簧会吸收部分能量并产生弹性变形,从而减小外力对机械手装置3和晶圆的影响。
6、其中在一种实施方式中:衔接臂模组203被设计为两个相互以球形联轴器万向铰接的部分,即第一臂体2031和第二臂体2032。这种设计使得两个臂体可以在多个方向上灵活运动,从而更好地适应和抵消来自不同方向的外力。
7、第一臂体2031的一端铰接于缓冲臂模组202中的套轴2022,形成了与缓冲臂模组的连接点。当缓冲臂模组中的套轴2022受到震动或外力时,第一臂体2031能够跟随其运动,将震动传递至衔接臂模组203。
8、第二臂体2032的一端则铰接于esc吸盘3的外部。由于esc吸盘3直接接触并固定晶圆,因此任何影响晶圆的震动或外力都会通过esc吸盘3传递至第二臂体2032。
9、通过这样的设计,机壳201、套轴2022、第一臂体2031、第二臂体2032和esc吸盘3共同构成了一个完整的运动链。这个运动链能够在esc吸盘3吸附晶圆后,自适应地抵消因外力产生的震动,保持晶圆的稳定性和安全性。
10、其中在一种实施方式中:机械手装置3进一步增设了角度调节模组204。这一模组被设计为在x、y和z轴方向上对esc吸盘3进行精确的位置调节。角度调节模组204通过其内部机构,如精密的伺服系统和传动装置,可以实现对esc吸盘3在各个轴向上的微小移动,这些微小移动被用于确保晶圆能够准确地到达并停留在预定的位置。结合之前描述的x-y-z线性模组4,这两个模组共同工作以提供对晶圆的全面位置控制。x-y-z线性模组4负责在较大范围内调节晶圆的位置,即所谓的宏动位置调节。而角度调节模组204则负责在更小范围内进行精细的位置调整,即微动位置调节。这种宏动与微动相结合的位置调节方式显著提高了晶圆传输的精度和灵活性。
11、其中在一种实施方式中:角度调节模组204的具体结构被详细描述。它主要包括固设于机壳201中部的旋转执行器2041,以及一个倾斜于esc吸盘3的y轴线的伺服电缸2042。旋转执行器2041被设计为控制伺服电缸2042的旋转运动,而伺服电缸2042则负责驱动esc吸盘3进行高度调节。
12、伺服电缸2042的活塞杆与esc吸盘3相连接,当活塞杆伸缩时,能够带动esc吸盘3进行高度方向上的微调。这种设计使得esc吸盘3能够适应不同高度的晶圆传输需求。
13、伺服电缸2042的缸体通过万向节联轴器与旋转执行器2041的输出端连接。万向节联轴器允许伺服电缸2042在旋转执行器2041的驱动下沿y轴旋转,同时保持其倾斜状态不变。这种设计使得esc吸盘3能够在水平面内进行微小角度的调整,以适应晶圆的不同方向和位置需求。
14、优选的方案中,旋转执行器采用伺服电机。伺服电机的输出轴作为输出端,通过万向节联轴器与伺服电缸2042的缸体建立连接关系。当伺服电机的输出轴旋转时,它能够精确控制伺服电缸2042沿y轴旋转的角度,从而实现esc吸盘3在水平面内的精确角度调整。
15、其中在一种实施方式中:机壳201、缓冲臂模组202、衔接臂模组203和esc吸盘3共同组成的运动链被特别设计为实质上相当于一种远心机构(remote center of motion(rcm) mechanism)。远心机构是一种特殊的机械结构,它通过物理约束形式,确保在运动过程中机构的某一点(在本实施方式中为机壳201的位置)始终通过远离机构本身的一个相对固定点(在本实施方式中为esc吸盘3的位置),这个固定点被称为远心点。
16、其中在一种实施方式中:所述x-y-z线性模组4包含三组旋转模组401和路径模组402,每一组都由旋转模组401滑动配合在路径模组402上构成。这三组模组按照特定的方向和顺序组合在一起,实现了机械手在x、y、z三个轴向的移动能力。
17、第一组中,路径模组402沿x轴布置,而旋转模组401则能够在该路径模组402上自由滑动。这意味着机械手可以沿着x轴进行位置调整。
18、第二组中,路径模组402改为沿z轴布置,并且搭载在第一组的旋转模组401上。这一组的旋转模组401同样可以在其路径模组402上自由滑动,使得机械手可以在z轴方向进行位置调整。同时,由于它是搭载在第一组的旋转模组401上的,因此也继承了第一组在x轴方向的移动能力。
19、第三组中,路径模组402再次改变方向,沿y轴布置,并且搭载在第二组的旋转模组401上。同样地,这一组的旋转模组401可以在其路径模组402上滑动,实现机械手在y轴方向的位置调整。由于它是搭载在第二组的旋转模组401上的,因此也继承了前两组在x轴和z轴方向的移动能力。
20、每组的旋转模组401都包括一个连接架4012,该连接架上安装有一个驱动电机4011。这个驱动电机4011能够驱动一个齿轮4013旋转。同时,每组的路径模组402都包括一个梁架4021和一个固定在其上的齿条4022。这个齿条4022与旋转模组401中的齿轮4013相啮合,使得当驱动电机4011工作时,连接架4012(及其所搭载的其他部件)可以沿着梁架4021滑动。
21、此外,第三组中的路径模组402的梁架4021上固定有一个连接台403。这个连接台403负责固定机械手装置3的机壳201,从而将整个机械手装置3与x-y-z线性模组4连接在一起。
22、与现有技术相比,本发明的有益效果是:
23、一、引入远心机构设计:本发明通过引入远心机构的设计,晶圆在传输过程中能够始终保持稳定的位置和姿态,有效避免了滑片现象的发生。远心机构确保晶圆受到均匀且稳定的支撑力,提高了传输的可靠性。而且x-y-z线性模组的设计进一步增强了机械手的运动稳定性和精确性,使得晶圆能够在三维空间内实现平稳、准确的移动。
24、二、灵活性强:机械手装置通过多组旋转模组和路径模组的组合,实现了在多个轴向的自由移动,能够适应各种复杂的操作场景和需求。这种设计使得机械手能够快速、准确地到达指定位置,提高了生产效率。同时,采用电机驱动的齿轮-齿条传动机制,实现了对机械手运动轨迹的精确控制,确保了晶圆传输的精确性。高精度的位置调整能力使得机械手能够在微小空间内完成精细操作,满足了半导体制造等领域对精度的高要求。
25、三、宏-微动调节模式:本发明的宏动调节可以快速将机械手或工作平台移动到接近目标位置,而微动调节则能在小范围内进行精细调整,确保最终定位的准确性。这种组合使得系统既具备了大范围移动的能力,又能在需要时实现高精度定位。同时宏动和微动的结合使得系统能够快速响应并移动到新的工作点,同时减少了不必要的精细调整时间。这种调节模式优化了工作流程,提高了自动化设备的整体工作效率。并且,宏动-微动调节模式允许系统在不同尺度上进行操作,无论是大范围的空间移动还是小范围的精确作业,都能有效应对。这种灵活性使得该技术能够适应多种应用场景和工艺需求。
- 还没有人留言评论。精彩留言会获得点赞!